一种面向热电联产机组灵活性运行的数据驱动建模与控制方法
本发明涉及火力发电机组灵活性运行的建模与控制,更具体地,涉及一种面向热电联产机组灵活性运行的数据驱动建模与控制方法。
背景技术:
1、以火电为主的传统电力系统正在向以风电、光伏发电等为主的清洁电力系统过渡。然而,间歇性可再生能源大规模并网对电网的稳定运行构成了威胁。因此,为了满足电网日益增长的稳定性要求,必须提高热电联产机组的灵活运行能力。
2、热电联产机组因其热效率高、排放低等优势在华北地区的热、电供应中发挥着重要作用。因此,提高热电联产机组的深度调峰和快速负荷响应能力已成为研究重点。然而,机组在宽负荷运行工况下表现出强烈的非线性和严重的多变量耦合特性,复杂的动态特性使得机组的高精度模型难以获取。此外,频繁的负荷波动和热干扰超过了传统控制器的调节能力。因此,迫切需要开发先进的建模和控制技术,为热电联产机组更灵活高效地参与深度调峰提供可行方案。
3、近年来,基于注意力机制的transformer神经网络由于其在全局特征提取和长期依赖关系捕获方面的优势,被成功应用于机器翻译、自然语言处理、序列建模等领域。transformer引入了自注意力机制,使模型能够灵活地关注序列中不同位置的元素。这种机制允许模型对序列中的每个位置与其他所有位置进行关联,而不受距离的限制,十分适用于具有时间依赖特性的热电联产机组模型的建立。然而,大多数现有的控制器依赖于精确的数学模型,使得通过数据驱动建模获得的黑箱模型难以服务于控制器设计。无模型自适应控制(mfac)作为一种数据驱动控制,不需要精确的数学模型,仅依靠系统的输入/输出数据在受控对象的每个操作点建立动态线性化数据模型,对非线性和耦合系统实现有效的控制效果。因此,将无模型自适应控制技术引入多变量强耦合的单元机组负荷跟踪控制中,以提高机组响应自动发电控制指令的快速性及准确性。
技术实现思路
1、本发明旨在提供一种面向热电联产机组灵活性运行的数据驱动建模与控制方法,提高机组负荷响应的快速性和精确性。该方法充分考虑了机组在宽负荷运行工况和大范围调峰下的多变量耦合、强非线性、大时滞等特性,结合改进型transformer数据驱动建模技术准确描述系统的复杂动态特性,所建模型在机组宽负荷范围内实现了较高的建模精度;结合增强型霜冰优化算法(erime)优化的无模型自适应预测控制策略,实现了机组对自动发电控制指令的有效跟踪。
2、本发明所提出的一种面向热电联产机组灵活性运行的数据驱动建模与控制方法,由以下5个步骤组成:
3、s1:分析超临界热电联产机组锅炉—汽轮机单元的控制难点;
4、s2:确立针对热电联产机组宽负荷建模的改进型transformer神经网络框架;
5、s3:描述无模型自适应预测控制技术的原理及其设计步骤;
6、s4:基于增强型霜冰优化算法获取最优控制器参数;
7、s5:依托仿真平台进行所提建模与控制方法的可行性验证及性能分析。
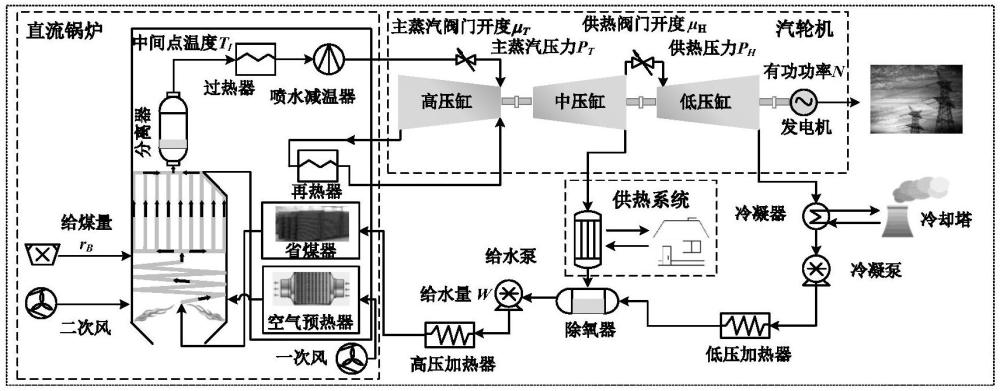
8、s1:电力系统的灵活性要求提高热电联产机组的调峰能力和快速负荷响应能力,然而,在大规模变负荷运行工况下,直流锅炉的慢动力学特性和汽轮机的快动力学特性之间的差异增大,显著的多变量耦合特性不利于柔性控制策略的设计;因此,迫切需要开发一种数据驱动的建模策略,合理描述热电联产机组在宽负荷范围内运行的动态特性,为灵活控制策略应用于现场提供保障;此外,在负荷调节过程中,需要更小的负荷跟踪误差和更短的稳定时间;同时,热电联产机组必须保持良好的抗扰性能、稳定的主蒸汽压力、中间点温度和供热压力,主蒸汽阀门开度、供热阀门开度、给煤量和给水量必须平稳变化,以保证机组运行的经济性和安全性。
9、基于s1的分析可知,热电联产机组在宽负荷运行工况下的动态特性多变,多变量耦合严重,传统的建模方法难以合理分析输入变量和输出变量间的非线性映射关系,因此需为其设计数据驱动建模方法获取高精度模型,为控制器的设计奠定基础,步骤s2可具体化为:
10、s2.1:为了提高网络对于热电联产机组直流锅炉-汽轮机耦合系统的时间依赖性获取能力,将双向门控循环单元(bigru)应用于transformer的位置编码中;bigru的基本组成单元是gru,由复位门和更新门组成;通过将长短期记忆网络中的遗忘门和输入门集成到更新门中,可以有效地丢弃无效信息,捕获远程依赖关系,大大减少参数数量,避免过拟合,gru的描述如下:
11、zt=σ(wzq′t+uzht-1+bz) (1)
12、rt=σ(wrq′t+urht-1+br) (2)
13、ct=tanh(wcq′t+rt(uc⊙ht-1)+bc) (3)
14、ht=ct⊙(1-zt)+ht-1⊙zt (4)
15、其中q't是t时刻的输入,ht-1是t-1时刻的单元输出,wz、wr和wc分别表示更新门、复位门和候选变量在输入qt'下的权重矩阵,uz、bz、ur、br、uc、bc分别表示更新门、复位门和候选变量的权重矩阵和偏置,zt、rt和ct分别是更新门、复位门和候选变量的输出;
16、未来时间点的信息有利于捕获更准确的长期依赖关系,因此,采用双向gru充分提取前向和后向序列的相关元素信息,进一步提高transformer网络的建模性能,描述如下:
17、
18、s2.2:基于自注意力机制的transformer神经网络擅长捕捉全局特征,而卷积神经网络(cnn)可以有效地利用局部特征,因此,transformer和cnn的优势互补有望解决多变量强耦合的热电联产机组动态特性分析问题,直接将多头自注意力机制应用于输入z,描述如下:
19、
20、
21、其中msa(q,k,v)表示多头自注意力层,q,k和v分别表示查询、键和值,mlp和layernorm分别表示多层前馈网络和层归一化,和ztime表示msa和mlp的输出;
22、为了进一步增强transformer网络对于局部特征的提取能力,设计了多感受野卷积(mrfc)模块,并将其集成到transformer的多头自注意力层中,描述如下:
23、
24、
25、其中mrfc表示多感受野卷积层,表示卷积机制的输出;
26、mrfc模块由token-wise卷积、point-wise卷积、swish激活函数和归一化组成;其中,token-wise卷积由不同感受野的卷积并行组成;采用不同大小的卷积核对输入进行并行处理,从多个感受野中获得特征,并使用零填充来确保特征图的大小保持不变;多个感受野的特征图沿着通道的维度连接,以获得point-wise卷积层的输出;接下来,point-wise卷积层使用大小为1的卷积来减少token-wise卷积层特征图中的通道数量,swish激活函数和归一化有利于进一步增强网络的收敛性和泛化能力;
27、解码器从编码器提供的输入变量以及输出变量的历史趋势关系中接收长期依赖性和局部特征信息;然后,这些信息被整合并馈送到多头自注意力层,以捕捉输入变量和输出变量之间的非线性映射关系。
28、确定了针对热电联产机组宽负荷建模的改进型transformer神经网络框架后,在步骤s3中将无模型自适应预测控制技术的原理及其设计步骤具体化:
29、s3.1:将350mw热电联产机组表示为多输入多输出非线性离散时间系统,如下所示:
30、y(k+1)=f(y(k),…y(k-ny),u(k),…,u(k-nu)) (10)
31、其中u(k)∈rm×1,y(k)∈rl×1分别表示k时刻的m维输入和l维输出,f是未知函数,ny和nu是未知正整数,表示系统的阶数;
32、方程式(10)中描述的热电联产机组直流锅炉-汽轮机耦合系统经过紧格式动态线性化可以描述为:
33、δy(k+1)=φc(k)δu(k)(11)
34、其中φc(k)∈rl×m,表示伪雅各比矩阵;
35、s3.2:mfapc的设计目标是找到最佳的未来控制行动,使过程输出尽可能接近热电联产机组的参考轨迹,控制性能的考虑是使以下函数最小化:
36、
37、其中,np和nu分别为预测时域和控制时域,λ>0为权重系数,y*(k+i)为系统在k+i时刻的预期输出;
38、根据等效动态线性模型(11),(12)中的y(k+i)可表示为:
39、
40、
41、然后,公式(13)可被重新表示为:
42、
43、其中表示kronecker积;
44、定义将公式(15)代入公式(12),对δunu求导,并令其等于零,可得到如下控制算法:
45、
46、因此,当前时刻的实际控制输入值为:
47、
48、其中
49、s3.3:在公式(14)中,φc(k+i),i=0,1,…,nu-1是未知数,必须用估计值和预测值代替,考虑以下估计标准函数:
50、
51、其中μ>0是权重系数,用于惩罚pjm估计中的过度变化;
52、对公式(18)关于φc(k)求极值,可以得到pjm的估计算法,即
53、
54、其中η∈(0,2]为步长因子;
55、s3.4:利用φc(k)的估计值建立估值序列的自动回归模型,得到如下预测公式:
56、
57、其中,θi,i=1,…,np为系数,np为适当的阶数,其值通常介于2和7之间;
58、根据公式(20),可以得出预测算法如下:
59、
60、其中j=1,2,…,nu–1;
61、定义其描述如下:
62、
63、其中
64、基于步骤s3描述的无模型自适应预测控制技术的原理及其设计步骤,在步骤s4中提出基于增强型霜冰优化算法获取最优控制器参数,具体过程如下:
65、s4.1:确定了无模型自适应预测控制器的结构之后,通过增强型霜冰优化算法获取控制器的最优参数λ,μ,η和δ;为了提高种群的质量和多样性,新的初始种群由logistic混沌映射产生,其公式为:
66、
67、ri,j(0)=lbi,j+g(i)·(ubi,j+lbi,j-ri,j)(24)
68、其中,g(i)∈rand(-1,0),n为rime个体的数量,ubi,j和lbi,j为第i个rime个体的第j个粒子的上限和下限,ri,j(0)表示第i个rime个体的第j个粒子的初始位置,为逻辑参数,值为3;
69、s4.2:利用软霜搜索策略,在早期迭代中快速探索整个空间,其数学模型表示如下:
70、
71、其中是更新后的粒子位置,rbest,j表示最佳rime个体的第j个粒子,r1是(-1,1)范围内的随机值,与cosψ一起控制rime粒子的运动方向,β代表环境因素,h是两个rime粒子之间的粘附力,为(0,1)范围内的随机数,r2是0到1之间的随机数;
72、
73、其中t表示当前迭代次数,t表示最大迭代次数;
74、
75、其中ω是用于控制步进函数β的段数,默认值为5,[·]表示四舍五入;在公式(25)中,e表示影响粒子凝结概率的附着系数,由下式给出:
76、
77、为了全面覆盖搜索空间,在软霜搜索机制中引入了鲸鱼优化算法的收缩包围和螺旋更新策略,这有助于算法广泛探索解空间;以50%的概率选择收缩包围机制或螺旋更新来更新霜冰粒子的位置,由下式给出:
78、
79、其中r3是[0,1]中的随机向量,a在迭代过程中从2线性减小到0,ri,j表示更新前第i个rime粒子的位置,b是用于定义对数螺旋形状的常数,l是[-1,1]中的随机数;如果|b|≥1,则r*是一个随机位置向量,如果|b|<1,r*表示当前最优候选,||表示绝对值;
80、s4.3:受穿刺现象的启发,采用硬霜穿刺机制来更新位置,提高算法的收敛性和跳出局部最优解的能力,粒子位置更新公式如下:
81、
82、其中r4表示0到1之间的随机数,fnormr(si)表示当前rime粒子适应度值的归一化值;
83、s4.4:为了提高全局探索效率,采用一种正向贪婪选择机制来参与种群更新,将更新后的粒子适应度值与更新前进行比较,如果更新后的比更新前好,则替换粒子和解,这种方法鼓励更频繁地出现杰出粒子,从而提高了解的质量,数学模型如下:
84、
85、s4.5:为了扩大最优解的搜索范围,引入levy飞行策略对最优解添加扰动,levy飞行策略的位置迭代公式由下式给出:
86、
87、其中ν是步长控制参数,是点积,levy(γ)是随机搜索路径,其分布如下:
88、
89、其中γ=1.5,ζ和τ满足正态分布,σu和σv定义如下:
90、
91、基于步骤s4中增强型霜冰优化算法所得的控制器参数,确立针对热电联产机组的数据驱动建模与控制策略,在步骤s5中依托仿真平台验证并分析所提建模与控制策略的可行性,具体过程如下:
92、s5.1:选取某350mw热电联产机组40%-100%额定负荷运行数据10000组,通过改进型transformer神经网络得到机组宽负荷运行工况下的模型;
93、s5.2:基于步骤s5.1所得模型,设计无模型自适应预测控制策略,并通过步骤s4所提的增强型霜冰优化算法获取控制器的最优参数;
94、s5.3:以实际自动发电控制指令为目标,基于步骤s5.2获取的最优控制器参数,开展大范围变负荷的指令跟踪实验;
95、s5.4:确定外部扰动ud1设定值,并送入被控对象,模拟机组实际运行过程中因煤质和变负荷带来的扰动,观察机组的被控量变化;
96、s5.5:将本发明提出的控制策略与pid、mfac进行比较,统计分析控制指标调节时间、超调量、绝对误差积分(iae)及平方误差积分(ise)。
97、
98、
99、本发明有益效果:
100、本发明结合我国电力生产领域逐步提升可再生能源电力消纳水平的发展趋势,从建模与控制的角度出发,提高机组对自动发电控制指令跟踪的快速性和准确性,为实现机组的深度、快速调峰提供可行方案。
101、本发明针对热电联产机组在宽负荷范围内运行时存在的严重多变量耦合和多变动态特性问题,提出了一种结合bigru和mrfc模块的改进型transformer结构。新的神经网络框架旨在全面分析直流锅炉-汽轮机耦合系统的全局和局部特征,所获得的高精度模型为控制器的设计提供了参考。
102、本发明为了解决机组在快速变负荷工况下运行时响应速度慢、精度低的问题,基于建立的高精度黑箱模型,设计了一种由erime优化的mfapc策略,并将其应用于热电联产机组,以提高系统的灵活运行能力。
- 还没有人留言评论。精彩留言会获得点赞!