一种穿戴式快速跌倒保护系统及基于姿态序列关联跌倒预测算法
本发明属于动作识别和姿态检测领域,具体涉及一种穿戴式快速跌倒保护系统及应用于该系统的基于姿态序列关联跌倒预测算法。
背景技术:
1、便携式高速充气式气囊是跌倒时最有效的保护装置,体积小、重量轻、适合随身穿戴。当发生跌倒,身体的髋关节在触地之前,让气囊引爆展开,实现对人体腰部和髋部的保护。
2、目前,市场上已有的跌倒检测产品虽然可以在老人突发摔倒后发出报警,但跌倒导致的损失已经无法挽回。针对老年人及行动障碍人群的跌倒问题具有的随机性和危险性,需要能够在日常生活中采用便于穿戴、准确识别跌倒行为、有效避免跌倒损伤的装置来对老人的跌倒行为进行可靠的保护,以提高老年人的健康水平,节省医疗开销,减轻看护负担。
3、哈尔滨工业大学的闫俊泽等设计一种由三轴加速度计和三轴陀螺仪组成的装置佩戴于人体胸部和大腿部,并通过实验设置两部位各自的合加速度和角速度阈值,达到92%的检测率,具备较强的时效性。韩国的amit等研究了一款佩戴于人体胸部的跌倒探测系统,它是由加速度传感器、陀螺仪、倾角传感器组成,如果人体的胸部角度变化70°,并且加速度变化非常剧烈则认为人体摔倒。实验证明它对前后摔倒具有较高的敏感性,但是对左右的方向的摔倒却不够敏感。
4、在现有技术中,跌倒检测系统的实际应用准确率尚待提高,且容易因人体正常生活动作引发误报警,响应时间过长。因此,如何解决上述技术问题和缺陷是亟待解决的重点。
技术实现思路
1、本发明的发明目的在于克服背景技术中所描述的缺陷,从而实现一种穿戴式快速跌倒保护系统,用以解决现有技术中跌倒检测系统的实际应用准确率尚待提高、容易因人体正常生活动作引发误报警、响应时间过长等问题。
2、为实现上述发明目的,本发明的技术方案是:
3、一种穿戴式快速跌倒保护系统,包括如下步骤:
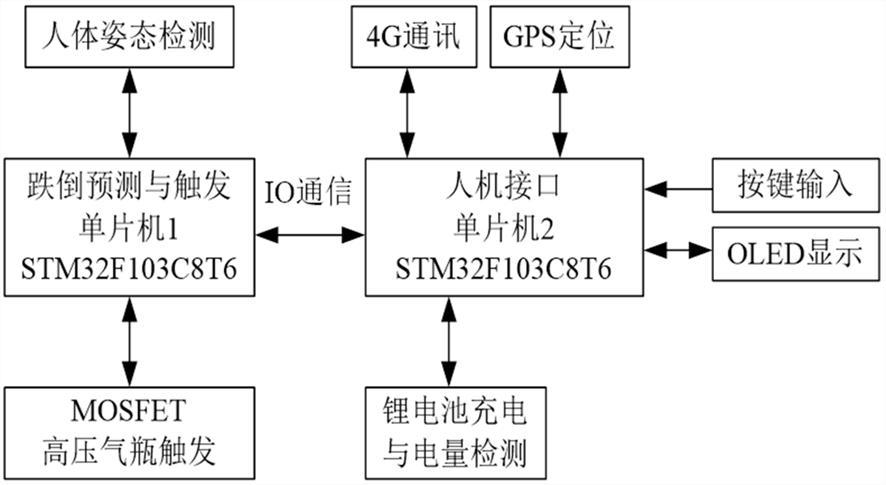
4、包括人体姿态检测模块、第一单片机模块、第二单片机模块、mosfet高气压阀触发模块、高压气瓶及气囊组件、锂电池充电与电量检测模块。
5、其中,人体姿态检测模块输出数据传输给第一单片机进行姿态解算和跌倒行为判别。
6、在上述的穿戴式快速跌倒保护系统中,第一单片机模块第二单片机进行数据交换。
7、在上述的穿戴式快速跌倒保护系统中,第二单片机模块接收第一单片机发送的数据,进行4g无线通讯并将gps定位数据传送给第一单片机,同时,第二单片机模块收集按键输入指令,通过oled显示屏显示系统状态。
8、在上述的穿戴式快速跌倒保护系统中,mosfet高气压阀触发模块在接收到第一单片机的指令后,触发气囊展开。
9、在上述的穿戴式快速跌倒保护系统中,锂电池充电与电量检测模块对内置的锂电池进行充电管理,并监控电池电量,提供电源供应给整个系统。
10、在上述的穿戴式快速跌倒保护系统中,所述第一单片机与第二单片机均采用主频为72mhz的stm32f103c8t6单片机。
11、同时,所述第一单片机与第二单片机通过io通信方式连接,互相交换数据。
12、另外,所述第二单片机与外部4g网络和gps卫星连接,接收和发送数据。
13、在上述的穿戴式快速跌倒保护系统中,所述第二单片机与mosfet高气压阀触发模块通过控制信号连接,控制高压气瓶进行充气使气囊展开。
14、在上述的穿戴式快速跌倒保护系统中,其运行步骤如下:
15、步骤一,初始化系统,初始化定时器、串口、io、adc硬件资源,同时检测锂电池电量。
16、步骤二,检查状态, 检查穿戴状态和气瓶连接情况。
17、步骤三,启动跌倒保护,获取人体姿态数据,进行姿态解算、跌倒预测和跌倒检测。
18、步骤四,上传信息,获取当前位置的经纬度信息并进行上传。
19、在上述的穿戴式快速跌倒保护系统中的运行步骤中,所述步骤一中检测锂电池电量时,若电量不足,显示液晶常亮提示充电;若电量充足,则继续下一步骤。
20、另外,所述步骤二中检查穿戴状态和气瓶连接情况时,若穿戴状态和气瓶连接异常,显示液晶常亮提示未准备就绪,若穿戴状态和气瓶连接正常,则进入下一步。
21、在上述的穿戴式快速跌倒保护系统中,当所述步骤三中若跌倒检测结果为未跌倒,则返回重新获取人体姿态数据,进行姿态解算和跌倒预测,继续监测;若检测到跌倒,则触发气囊展开。
22、所述步骤四中上传信息时将经纬度信息上传至云平台,显示液晶常亮提示跌倒已触发保护。
23、本发明还公开一种应用于上述的穿戴式快速跌倒保护系统的基于姿态序列关联跌倒预测算法,该跌倒预测算法包括如下步骤:
24、步骤一,特征部位的选择与数据采集,选择特征提取部位,选择腰部作为姿态角和重力加速度信息获取的基准点。
25、步骤二,基于姿态角关联的动作识别,区分日常生活动作,利用合成角度区分动作。
26、步骤三;基于重力加速度关联的动作辨识,定义z轴与y轴合成加速度,确定跌倒关键指标,设置阈值区分动作。
27、步骤四;综合分析并做出判断,连续监测pitch角度,结合关键指标做出最终决策。
28、在上述的基于姿态序列关联跌倒预测算法中,所述步骤一中特征部位选择腰部作为姿态角和重力加速度信息获取的基准点,该算法中所配置的传感器为集成了三轴陀螺仪和三轴加速度计、能够输出完整的九轴融合数据的传感器。
29、在上述的基于姿态序列关联跌倒预测算法中,所述步骤二中区分日常生活动作包括向前弯腰动作、左右侧向弯腰、站立后仰动作。
30、另外,利用合成角度区分动作时,合成角度计算公式为:
31、,式中,pitch为俯仰角,roll为横滚角。
32、取sqrtrp和pitch角度差值的绝对值rpp_delta,rpp_delta计算公式为:
33、,通过设置rpp_delta的阈值,过滤正常行走、前向弯腰不需要触发保护的动作,同时提取侧向和后向的弯腰与跌倒动作。
34、在上述的基于姿态序列关联跌倒预测算法中,所述步骤三中z轴表示前后方向, y轴表示垂直方向。
35、利用z轴与y轴加速度的幅值来区分后向跌倒与坐下后仰、坐下后躺和站立后仰动作的关联性,定义z轴与y轴的合成加速度为sqrtaccyz,sqrtaccyz计算公式为:
36、,式中,accy表示y方向加速度,accz表示z方向加速度。
37、在上述的基于姿态序列关联跌倒预测算法中,所述步骤三中确定跌倒关键指标,即z轴加速度与合成加速度sqrtaccyz之间的差值绝对值accyzz_delta,accyzz_delta计算公式为:
38、,通过设置accyzz_delta的阈值,区分跌倒与站立后仰、坐下后仰和坐下后躺类似但不需触发保护的动作。
39、在上述的基于姿态序列关联跌倒预测算法中,所述步骤四中连续监测pitch角度时,当检测到pitch角度连续下降并达到预设的跌倒预测阈值时,进一步观察accz与accyz的变化规律。
40、结合rpp_delta和accyzz_delta两个关键指标,若两者均超过各自设定的阈值,则判定发生了跌倒事件,进而启动气囊展开机制进行保护。
41、与现有技术相比,本发明的穿戴式快速跌倒保护系统至少具有以下有益效果:
42、本发明的穿戴式快速跌倒保护系统,通过人体各个动作下的姿态数据集,对姿态数据集中的多个变量进行分析,根据三个方向的姿态角之间的关联性来粗略区分跌倒动作与正常动作,再通过三个方向的重力加速度来进一步区分跌倒动作与正常动作,最终得到跌倒预测算法。该算法能有效区分摔倒过程与其它日常生活行为过程,并且能够在短时间内完成跌倒预测,满足快速性要求。
43、本发明通过设定rpp_delta和accyzz_delta的阀值可以作为区分向后跌倒与正常活动之间的依据,并且能够快速的在向后跌倒动作发生后,迅速的进行反应,实际应用时对各个方向的跌倒测试均较为敏感,准确率较高,且可有效降低因人体正常生活动作引发误报警概率,同时,本发明可有效降低响应时间,及时预测老年人摔倒并利用避免髋骨碰撞造成伤害。
- 还没有人留言评论。精彩留言会获得点赞!