一种基于无人机避障的航线设计方法、系统及终端与流程
本发明涉及无人机控制,尤其涉及一种基于无人机避障的航线设计方法、系统、终端及计算机可读存储介质。
背景技术:
1、无人机巡检作业的主要目的是提高巡检效率和准确性,同时降低成本和风险。无人机巡检通过优化飞行路径和设定巡检任务,能够高效地获取巡检对象的信息,及时发现和记录异常情况。
2、然而,在现有的无人机巡检领域中,无人机的感知和避障技术有限,有时会出现误判或无法及时避障的情况,对无人机和电力设施的安全造成威胁,且在飞行过程中可能面临碰撞等安全风险,需要采取措施确保其安全性。
3、因此,现有技术还有待于改进和发展。
技术实现思路
1、本发明的主要目的在于提供一种基于无人机避障的航线设计方法、系统、终端及计算机可读存储介质,旨在解决现有技术中多个无人机共同执行巡检任务容易产生混乱,以及无人机与周围环境建筑、无人机之间可能产生碰撞,从而导致任务危险性较高的问题。
2、为实现上述目的,本发明提供一种基于无人机避障的航线设计方法,所述基于无人机避障的航线设计方法包括如下步骤:
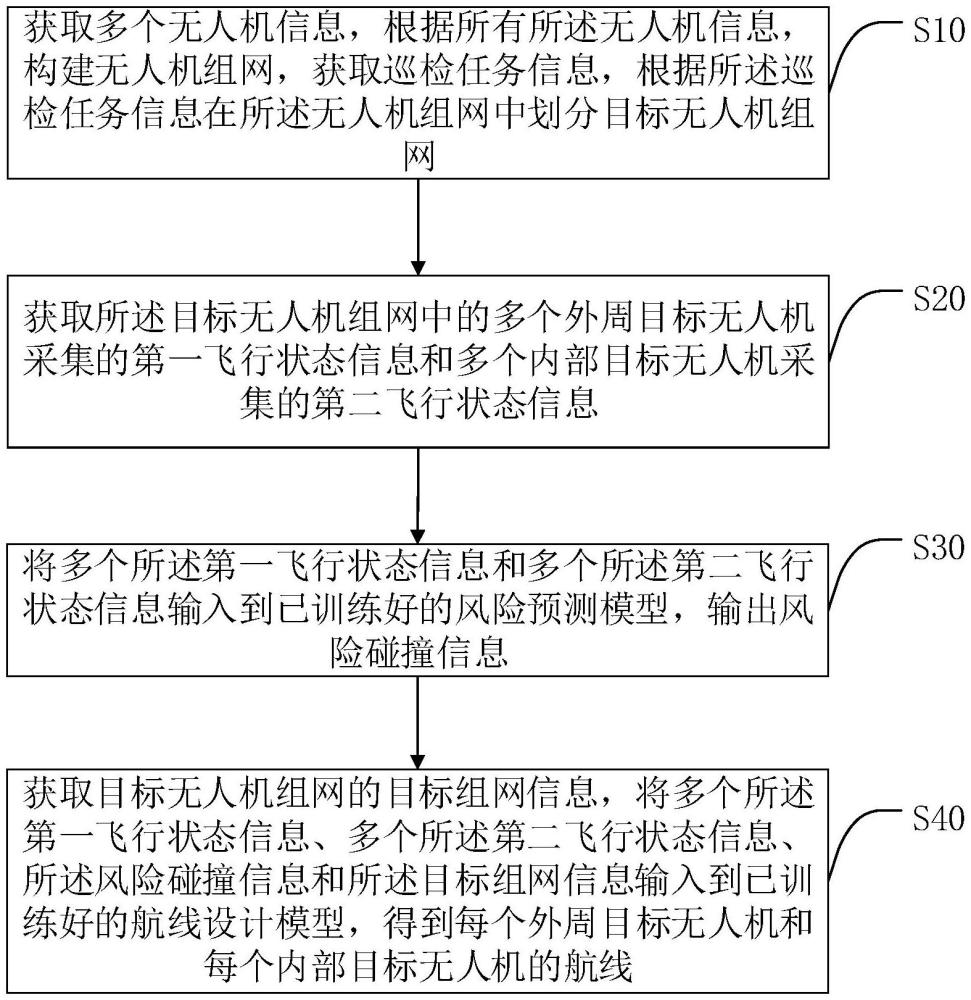
3、获取多个无人机信息,根据所有所述无人机信息,构建无人机组网,获取巡检任务信息,根据所述巡检任务信息在所述无人机组网中构建目标无人机组网;
4、获取所述目标无人机组网中的多个外周目标无人机采集的第一飞行状态信息和多个内部目标无人机采集的第二飞行状态信息;
5、将多个所述第一飞行状态信息和多个所述第二飞行状态信息输入到已训练好的风险预测模型,输出风险碰撞信息;
6、获取所述目标无人机组网的目标组网信息,将多个所述第一飞行状态信息、多个所述第二飞行状态信息、所述风险碰撞信息和所述目标组网信息输入到已训练好的航线设计模型,输出每个外周目标无人机和每个内部目标无人机的航线。
7、可选地,所述的基于无人机避障的航线设计方法,其中,所述获取多个无人机信息,根据所有所述无人机信息,构建无人机组网,获取巡检任务信息,根据所述巡检任务信息在所述无人机组网中构建目标无人机组网,具体包括:
8、获取多个无人机信息,根据所有所述无人机信息,建立所有无人机之间的连接,得到无人机组网;
9、获取巡检任务信息并分析,得到多个事件信息,根据多个所述事件信息,更改所述无人机组网中多个无人机的状态,得到多个目标无人机,并根据所有所述目标无人机构建目标无人机组网;
10、其中,所述无人机组网中的无人机为非选中状态,所述目标无人机组网中的目标无人机为选中状态。
11、可选地,所述的基于无人机避障的航线设计方法,其中,多个所述目标无人机包括:多个外周目标无人机和多个内部目标无人机;
12、所述获取所述目标无人机组网中的多个外周目标无人机采集的第一飞行状态信息和多个内部目标无人机采集的第二飞行状态信息,具体包括:
13、获取用户的查询指令,根据所述查询指令检测多个所述外周目标无人机和多个所述内部目标无人机的状态;
14、当确定多个所述外周目标无人机和多个所述内部目标无人机的状态均为选中状态,则获取每个所述外周目标无人机的第一飞行状态信息和每个所述内部目标无人机采集的第二飞行状态信息。
15、可选地,所述的基于无人机避障的航线设计方法,其中,所述当确定多个所述外周目标无人机和多个所述内部目标无人机的状态均为选中状态,则显示每个所述外周目标无人机的第一飞行状态信息和每个所述内部目标无人机采集的第二飞行状态信息,具体包括:
16、当确定多个所述外周目标无人机的状态均为选中状态,则获取每个所述外周目标无人机采集的起点位置信息、终点位置信息、环境信息、无人机距离信息、途径点信息、飞行方向信息和航线状态信息;
17、当确定多个所述内部目标无人机的状态均为选中状态,则获取每个所述外周目标无人机采集的起点位置信息、终点位置信息、无人机距离信息、途径点信息、飞行方向信息和航线状态信息;
18、其中,所述环境信息表示所述外周目标无人机实施拍摄的与周围建筑物的距离信息,所述无人机距离信息表示每个所述目标无人机与邻近的目标无人机之间的距离信息。
19、可选地,所述的基于无人机避障的航线设计方法,其中,所述将多个所述第一飞行状态信息和多个所述第二飞行状态信息输入到已训练好的风险预测模型,输出风险碰撞信息,具体包括:
20、构建初始风险预测模型,获取历史巡检任务的历史巡检任务信息,并将所述历史巡检任务信息输入到所述初始风险预测模型进行训练,得到风险预测模型;
21、将每个所述环境信息和每个所述无人机距离信息输入到所述风险预测模型,输出风险碰撞信息。
22、可选地,所述的基于无人机避障的航线设计方法,其中,所述目标组网信息包括:信息传递方向和网状结构信息;
23、所述获取所述目标无人机组网的目标组网信息,将多个所述第一飞行状态信息、多个所述第二飞行状态信息、所述风险碰撞信息和所述目标组网信息输入到已训练好的航线设计模型,输出每个外周目标无人机和每个内部目标无人机的航线,具体包括:
24、构建初始航线设计模型,获取历史航线,并将所述历史航线输入到所述初始航线设计模型进行训练,得到航线设计模型;
25、获取所述目标无人机组网中每个目标无人机的信息传递方向和网状结构信息;
26、将每个所述起点位置信息、每个所述终点位置信息、每个所述途径点信息、每个所述飞行方向信息、每个所述航线状态信息、所述风险碰撞信息、每个所述信息传递方向和网状结构信息输入所述航线设计模型,输出每个外周目标无人机和每个内部目标无人机的航线。
27、可选地,所述的基于无人机避障的航线设计方法,其中,所述将每个所述起点位置信息、每个所述终点位置信息、每个所述途径点信息、每个所述飞行方向信息、每个所述航线状态信息、所述风险碰撞信息、每个所述信息传递方向和网状结构信息输入所述航线设计模型,输出每个外周目标无人机和每个内部目标无人机的航线,之后还包括:
28、根据每个所述航线,生成多个控制指令;
29、根据所有所述控制指令,控制每个所述外周目标无人机和每个所述内部目标无人机调整飞行状态;
30、根据所述网状结构信息和所述信息传递方向,将多个目标无人机调整后的飞行状态发送给多个邻近的目标无人机,以控制多个邻近的目标无人机根据所有所述飞行状态更新所述无人机距离信息。
31、此外,为实现上述目的,本发明还提供一种基于无人机避障的航线设计系统,其中,所述基于无人机避障的航线设计系统包括:
32、无人机连接模块,用于获取多个无人机信息,根据所有所述无人机信息,构建无人机组网,获取巡检任务信息,根据所述巡检任务信息在所述无人机组网中构建目标无人机组网;
33、信息获取模块,用于获取所述目标无人机组网中的多个外周目标无人机采集的第一飞行状态信息和多个内部目标无人机采集的第二飞行状态信息;
34、风险预测模块,用于将多个所述第一飞行状态信息和多个所述第二飞行状态信息输入到已训练好的风险预测模型,输出风险碰撞信息;
35、航线设计模块,用于获取所述目标无人机组网的目标组网信息,将多个所述第一飞行状态信息、多个所述第二飞行状态信息、所述风险碰撞信息和所述目标组网信息输入到已训练好的航线设计模型,输出每个外周目标无人机和每个内部目标无人机的航线。
36、此外,为实现上述目的,本发明还提供一种终端,其中,所述终端包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的基于无人机避障的航线设计程序,所述基于无人机避障的航线设计程序被所述处理器执行时实现如上所述的基于无人机避障的航线设计方法的步骤。
37、此外,为实现上述目的,本发明还提供一种计算机可读存储介质,其中,所述计算机可读存储介质存储有基于无人机避障的航线设计程序,所述基于无人机避障的航线设计程序被处理器执行时实现如上所述的基于无人机避障的航线设计方法的步骤。
38、本发明中,获取多个无人机信息,根据所有所述无人机信息,构建无人机组网,获取巡检任务信息,根据所述巡检任务信息在所述无人机组网中构建目标无人机组网;获取所述目标无人机组网中的多个外周目标无人机采集的第一飞行状态信息和多个内部目标无人机采集的第二飞行状态信息;将多个所述第一飞行状态信息和多个所述第二飞行状态信息输入到已训练好的风险预测模型,输出风险碰撞信息;获取所述目标无人机组网的目标组网信息,将多个所述第一飞行状态信息、多个所述第二飞行状态信息、所述风险碰撞信息和所述目标组网信息输入到已训练好的航线设计模型,输出每个外周目标无人机和每个内部目标无人机的航线。本发明通过分析无人机的飞行状态信息,得到每个无人机在巡检时与周围环境建筑的信息以及无人机之间的距离信息,并通过无人机组网的结构信息控制多个无人机,保持无人机之间安全距离,有效避免无人机与周围环境建筑、无人机之间可能产生的碰撞,降低了多个无人机在执行巡检任务时的危险性,提高了对多个无人机进行管理的效率。
- 还没有人留言评论。精彩留言会获得点赞!