一种基于反射内存远程控制的防撞激励系统的制作方法
本发明涉及飞行仿真系统领域,具体涉及一种基于反射内存远程控制的防撞激励系统。
背景技术:
1、本节中的陈述仅提供与本公开相关的背景信息,并且可能不构成现有技术。
2、随着信息技术不断地发展,飞行仿真系统技术得到了迅速的发展,飞行中所关联设备越来越多,每一种设备都有自己独特的功能,提供有关飞行安全的某一方面的信息。这时要求飞行仿真系统要求能够处理大容量信息,高精度数据处理,提供实时飞行信息。但是飞行防真系统中多采用串口、以太网、can网来建立系统网络,对于航电总线系统,连接多重任务,无法避免网络通信系统的不可预测性,保证信息的完整性和命令传输实时,难以实现飞行仿真系统的逼真度。
3、系统设计人员越来越需要在更短时间内构造出更强大、更复杂的系统。在这种情况下,硬件成本与软件和集成硬件/软件的成本相比微不足道,这点在单机系统与微系统中表现得更加明显。在时间与系统正常运行的低单位投资成为市场上的关键因素时,使用反射内存便会带来极大的利益。在这些要求苛刻的系统中,反射内存简单的读/写通信方式大大提高了产品上市时间,同时提高了网络上的数据通过量。
4、反射内存网络(reflective memory network)是一种特殊的共享内存系统,旨在使多个独立计算机能够高效地共享通用数据集。它通过在每个节点保存共享内存的独立备份,并以极低的延迟进行数据的同步更新,确保每个节点都能访问到最新的数据。这种设计尤其适用于需要高实时性和低延迟的数据通信场合。
5、这种技术运用于飞行仿真系统,由实时网络技术构建起来的实时系统是一种能够在确定的时间内执行计算或处理功能并对外部的异步事件做出相应计算机系统。实时网络特点就是通信的确定性和可预测性,就是说实时网络中各节点间数据传输的时间是确定的。网络内存网就是一种高速,实时,确定性的网络,可以较好地解决飞行仿真实时系统数据传输的实时性问题,提高网络数据的传输速率和纠错能力,还原飞行仿真系统逼真度。
6、飞行仿真系统要求能够处理大容量信息,高精度数据处理,提供实时飞行信息。但是当前飞行仿真系统多采用串口、以太网、can网来建立系统网络,串口和can的可靠性较高但其传输速率比较慢、实时性比较差,传统的以太网已经能达到千兆级传输速率,但由于以太网通信需要借助网络协议来完成,延迟具有很大的不确定性,降低了通信效率,很难满足实时性要求,无法保证信息的完整性和命令传输实时,难以实现飞行仿真系统的逼真度。
技术实现思路
1、本发明的目的在于:针对现有技术中存在问题,提供了一种基于反射内存远程控制的防撞激励系统,利用反射内存网络可以在vme、pci和pcm等多种总线上使用,同时适用于不同类型的pc机和多种操作系统,信息传输具有高速、实时及确定性的优点,具有支持中断和传输纠错强等特点;通过反射内存网络接收远程终端下发的仿真的飞行参数,并实时解算,通过激励器完成tcas激励或者应答机激励功能选择,然后下发激励命令,最终完成对tcas设备的激励。
2、本发明的技术方案如下:
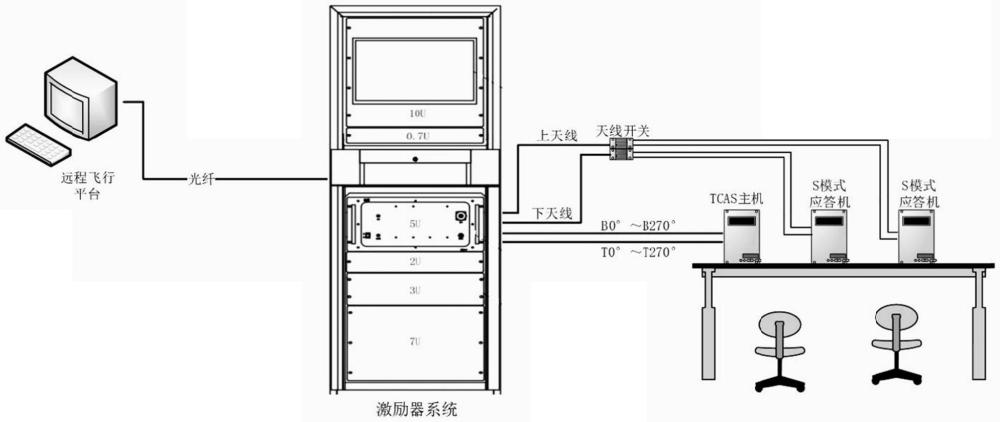
3、一种基于反射内存远程控制的防撞激励系统,包括:远程飞行平台、激励器系统、tcas主机和s模式应答机;所述远程终端与激励器系统通过反射内存网络通信;所述tcas主机和s模式应答机与激励器系统通讯;
4、所述远程飞行平台内置激励应答机软件和动态目标编辑软件,能够通过激励应答机软件设置不同模式以及通过动态目标编辑软件编辑动态目标信息;
5、所述激励器系统根据远程飞行平台下发的指令、s模式应答机发出的应答信号、tcas主机发出的询问信号,激励s模式应答机和tcas主机。
6、进一步地,所述反射内存网络的物理拓扑结构,包括:环形拓扑结构或星型拓扑结构。
7、进一步地,所述激励器系统,包括:机柜、显示器、ni控制分机和激励器;所述显示器、ni控制分机和激励器均安装在机柜内;所述显示器和激励器均与ni控制分机通信;所述ni控制分机通过反射内存网络与远程飞行平台通信;所述激励器与tcas主机和s模式应答机通信。
8、进一步地,所述ni控制分机,包括:ni机箱、控制单元、高度数据板卡、反射内存条;所述控制单元、高度数据板卡、反射内存条安装在ni机箱内;所述控制单元与激励器通信。
9、进一步地,所述激励器,包括:衰减器组、发射模块、接收模块、tcas处理模块、电源模块、底板;所述发射模块、接收模块、tcas处理模块、电源模块与底板通信,所述底板与控制单元通信;所述发射模块与接收模块之间使用射频通信;所述衰减器组与发射模块通信,所述衰减器组通过上天线和下天线与s模式应答机通信,所述衰减器组还通过模式上天线和模式下天线与应答机通信。
10、进一步地,所述远程飞行平台内插有反射内存条;远程飞行平台内的反射内存条和ni机箱内的反射内存条通过光纤连接。
11、进一步地,当需要设置本机飞行高度时,给tcas主机和s模式应答机通电,打开激励器系统,并通过高度数据板卡模拟气压高度通过rs429发送至s模式应答机,将轮载信号至于空中状态。
12、进一步地,s模式应答机激励流程如下:
13、远程飞行平台通过激励应答机软件分别设置a模式和c模式,经反射内存网路发送给激励器系统,激励器的tcas处理模块接收到命令后,开始向s模式应答机激励;激励器根据参数设置指定进行激励应答机时,形成询问编码将询问编码信息发送给发射模块,发射模块形成询问射频信号,通过指定的天线完成询问,当接收模块接收到来自指定天线的应答信号后,将应答信号以中频信号形式上报给tcas处理模块,tcas处理模块将应答信号解码后,获得相关应答信息,将应答信息结果上报给远程飞行平台,显示本机的高度和代码信息。
14、进一步地,tcas主机激励流程如下:
15、远程飞行平台通过动态目标编辑软件编辑动态目标的数量,方位,距离、速度和高度信息,经反射内存网络发送动态指令,开始执行动态目标模拟流程,激励器系统的tcas处理模块接收到动态命令后,开始目标激励功能;
16、激励器收到来自tcas主机的询问信号,接收模块将中频信号发送给tcas处理模块,tcas处理模块将询问信号解码后,获得相关询问信息,根据询问信息以及预设的参数进行相应应答,形成应答编码,经过发射模块,通过指定的上天线或者下天线发送出去形成完整的目标模拟过程,同时信息上传结果给远程飞行平台终端显示,通过模拟飞行数据,计算获取目标机相对于本机的距离、高度、方位及运动轨迹以判定其是否对本机构成潜在碰撞危险,确定在最接近点的空中间隔是否存在潜在的冲突威胁,向飞行员输出避让建议。
17、进一步地,所述反射内存网络的物理拓扑结构为环形拓扑结构。
18、与现有的技术相比本发明的有益效果是:
19、本发明通过实时接收远程飞行平台下发的载机数据,实现本机和目标机相对运动态势动态关联,还原飞机飞行中tcas系统工作的逼真度;同时,还能根据不同场景文件提前编辑和存储,实时下发。
- 还没有人留言评论。精彩留言会获得点赞!