小型低成本天文望远镜光学目标自跟踪方法与流程
本技术涉及太空态势感知,尤其涉及一种小型低成本天文望远镜光学目标自跟踪方法。
背景技术:
1、太空态势感知,也称空间态势感知,从广义上讲,是指对所有发生在空间的时间、威胁,活动和状态进行感知,以及对影响太空活动的所有因素的认知和分析,从而使指挥决策和操作人员获取并维持空间优势。在太空态势感知领域,以往采用的航天与导弹武器测控常用的大型光电系统,虽然具有转台精度高,速度快的优势,但制造成本非常高,难以实现阵列式布设。
2、随着光学成像和望远镜技术的不断进步,小型天文望远镜也能够用于服务太空态势感知。在一般场景下,当天文望远镜与跟踪探测目标的斜距超过一定阈值后,通常就不再需要高转速,例如对空间站的跟踪探测,当最高仰角不超过70°时,天文望远镜的最高转速一般会小于4.5°/s。因此,可以在此基础上探索小光电系统在太空态势感知方面的应用,以实现低成本、分布式、无人化的跟踪探测能力。
3、天文望远镜本身并不具备对人造卫星或飞机的跟踪功能,它采用的步进电机经纬仪难以实现连续的引导随动,这里所说的引导随动是指天文望远镜仅仅在外部数据引导下自行转动,此时转台与天文望远镜式分立的,它们之间无需数据交互。虽然已有很多天文爱好者利用小型天文望远镜成功拍摄到空间站,并获取了结构清晰的可见光图像,但存在如下技术问题:
4、第一,利用小型天文望远镜对空间目标进行跟踪探测时,仅仅能够获取视场中很明亮的目标,这对于空间站等明亮目标进行跟踪探测是可行的,但对于其他场景,例如跟踪空间站之外的众多低轨道卫星,其亮度较低,难以满足视场中最亮目标的程度,则会存在失效的风险。第二,通过opencv提供的多种跟踪算法,例如csrt(channel and spatialreliability tracking,csrt)算法,在小型天文望远镜指向不动的情况下,能够实现良好的跟踪探测效果,但在小型天文望远镜从静止到转动的切换过程中,很容易因为小型天文望远镜的突然加速转动,导致对目标的跟踪探测失效;
5、第三,由opencv提供的多种跟踪算法,在对目标跟踪探测成功的判断依据上难以控制,不利于在穿云等场景下对目标进行连续跟踪探测。
6、因此,有必要提出一种方案以改善上述相关技术方案中存在的一个或者多个问题。
7、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本技术的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本技术实施例提供一种小型低成本天文望远镜光学目标自跟踪方法,包括以下步骤:
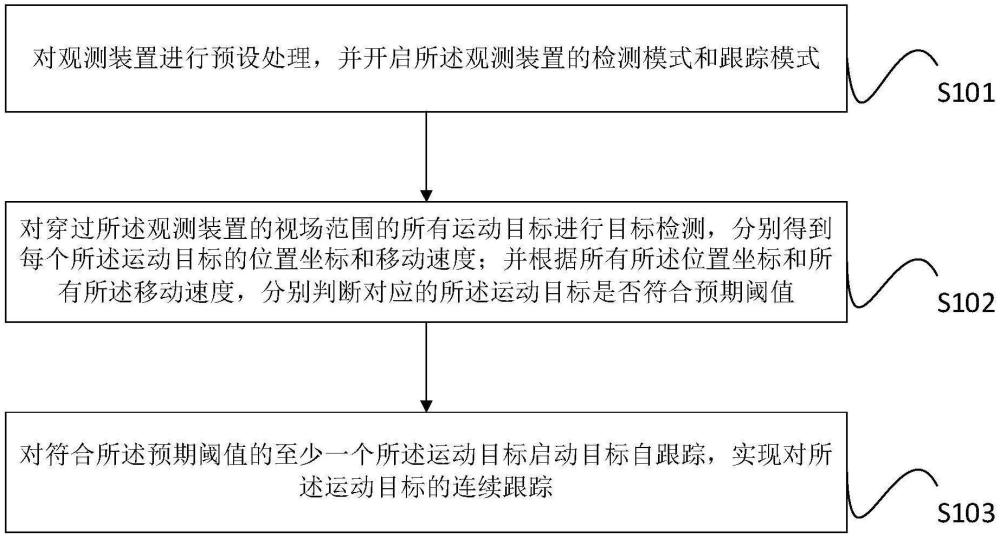
2、对观测装置进行预设处理,并开启所述观测装置的检测模式和跟踪模式;
3、对穿过所述观测装置的视场范围的所有运动目标进行目标检测,分别得到每个所述运动目标的位置坐标和移动速度;并根据所有所述位置坐标和所有所述移动速度,分别判断对应的所述运动目标是否符合预期阈值;
4、对符合所述预期阈值的至少一个所述运动目标启动目标自跟踪,实现对所有所述运动目标的连续跟踪。
5、本技术的一示例性实施例中,所述观测装置包括小型天文望远镜组件,所述小型天文望远镜组件包括主镜、主镜相机、导星镜、导星镜相机、转台和目标跟踪器。
6、本技术的一示例性实施例中,所述对观测装置进行预设处理,并开启所述观测装置得检测模式和跟踪模式的步骤包括:
7、将所述小型天文望远镜组件固定设置在预设位置,并设置所述小型天文望远镜组件的观测参数;
8、对所述小型天文望远镜组件进行标校处理,使所述小型天文望远镜组件的静态指向精度达到0.1°,并至少使所述导星镜相机的视场角度均大于2°。
9、本技术的一示例性实施例中,所述观测参数包括所述主镜、所述主镜相机、所述导星镜和所述导星镜相机的型号、口径、焦距、分辨率,以及像元大小。
10、本技术的一示例性实施例中,所述对穿过所述观测装置的视场范围的所有运动目标进行目标检测,分别得到每个所述运动目标的位置坐标和移动速度的步骤包括:
11、采用前后两帧相减的方法,分别对穿过所述视场范围的所有运动物体进行判断,得到多个候选运动目标;
12、利用直线检测方法,分别从连续多帧图像中对每个所述候选运动目标进行所述目标检测,将满足近似直线运动的所有所述候选运动目标均判定为所述运动目标,并分别标记每个所述运动目标的所述位置坐标和所述移动速度;
13、其中,所述位置坐标为通过所述观测装置观测到的所述运动目标的像素坐标;
14、所述移动速度包括所述运动目标的方位速度和俯仰速度。
15、本技术的一示例性实施例中,所述并根据所有所述位置坐标和所有所述移动速度,分别判断每个所述运动目标是否符合预期阈值的步骤包括:
16、将所有所述位置坐标和所有所述移动速度,分别换算成对应的所述运动目标的所述方位速度和所述俯仰速度;
17、将所有所述方位速度分别与对应的所述运动目标的实际方位速度进行比较,并将所有所述俯仰速度分别与对应的所述运动目标的实际俯仰速度进行比较;
18、若所述方位速度与对应的所述实际方位速度的差值,以及所述俯仰速度与对应的所述实际俯仰速度的差值均小于等于0.3度/秒,则所述运动目标符合所述预期阈值。
19、本技术的一示例性实施例中,所述对符合所述预期阈值的至少一个所述运动目标启动目标自跟踪,实现对所述运动目标的连续跟踪的步骤包括:
20、所述目标跟踪器采用模板匹配方式对所述运动目标进行跟踪,确定所述运动目标的当前像素位置;
21、根据所述当前像素位置,判断所述运动目标与视场画面的预定位置的距离;
22、当所述运动目标远离所述预定位置时,启动所述观测装置对所述运动目标进行所述目标自跟踪。
23、本技术的一示例性实施例中,所述目标跟踪器采用模板匹配方式对所述运动目标进行跟踪,确定所述运动目标的当前像素位置的步骤包括:
24、初始化所述目标跟踪器,并记录所述目标跟踪器的目标图像模板;
25、在当前帧图像中,更新所述目标图像模板,并根据所述预期阈值,判断对所述运动目标进行跟踪是否成功;
26、若跟踪成功,则输出当前帧目标像素位置,并将所述当前帧目标像素位置作为所述运动目标的所述当前像素位置;
27、若跟踪不成功,则输出前一帧目标像素位置,并将所述前一帧目标像素位置作为所述运动目标的所述当前像素位置。
28、本技术的一示例性实施例中,所述当所述运动目标远离所述视场范围时,启动所述观测装置对所述运动目标进行所述目标自跟踪的步骤包括:
29、根据所述运动目标的所述当前像素位置,计算所述运动目标的脱靶量,
30、并将所述脱靶量转换为pid控制量;
31、启动所述观测装置,并将所述pid控制量叠加到所述观测装置的所述转台的转速上,实现对所述运动目标的所述目标自跟踪。
32、本技术的一示例性实施例中,在对所述运动目标进行所述目标自跟踪的过程中,若所述运动目标丢失,则采用手动选择所述运动目标,或重新对所述运动目标进行所述目标检测,并重启所述目标自跟踪,直至完成对所述运动目标的连续跟踪。
33、有益效果:
34、本技术提供一种小型低成本天文望远镜光学目标自跟踪方法,至少具有以下有益效果:
35、(1)本技术对运动目标的目标检测,并根据每个运动目标的位置坐标和移动速度,判断出每个运动目标是否符合预期阈值,对符合预期阈值的运动目标进行目标自跟踪,从而解决了预设位置处获取穿越视场的运动目标的问题;
36、(2)本技术利用聚类算法和直线检测方法得出连续多帧图像中的运动目标,并获取运动目标的像素坐标,进而得到运动目标的方位速度和俯仰速度,从而滤除了干扰目标,获取到所需目标,降低了虚警率;
37、(3)本技术通过运动目标检测获取目标图像模板,并通过计算后续帧图像与目标图像模板之间的余弦相似度,从而确定出运动目标在后续帧图像中的像素坐标,继而得到脱靶量,利用比例积分微分(proportional integral derivative control,pid)控制方法将脱靶量换算为速度增量,并将其叠加到转台的转速上,从而实现小型低成本望远镜对运动目标的连续跟踪。
- 还没有人留言评论。精彩留言会获得点赞!