一种多旋翼无人机油气管线巡检方法及系统与流程
本发明属于激光巡检,具体涉及一种多旋翼无人机油气管线巡检方法及系统。
背景技术:
1、在对天然气管道和油气设施的维护与管理中,需重点监测甲烷气体的泄露情况,避免大型甲烷泄露事件的发生,已知大型甲烷泄露事件的发生往往伴随着难以确定的泄露点位置,这要求检测人员必须对泄露区域进行大规模的排查。而传统的甲烷监测受限于地形、管道安装位置等因素,普通的人工巡检抑或是便携式甲烷检测仪器在面对大面积、长距离和复杂地形的管道时,往往无法实现有效且及时的监测,进而导致潜在的安全隐患无法被发现。
2、在实际应用中,对于如山区、沼泽、沙漠等难以通行的地带,人工巡检不仅效率低下,排查周期较长,且人工成本高昂,存在较高的安全风险;具体来说,许多油气管线都布设在水土流失较为严重的地区,这些地区的地表覆盖物稀少,土壤稳定性差,一旦发生水土流失,油气管线很容易裸露在地表之上,缺乏必要的保护,也就容易发生管线受损,甲烷溢出的状况,而采用大量人工去监测排查,不仅无法得到精确的指导和定位,错失实际泄露点,导致泄露问题得不到及时解决,加剧环境污染和安全风险;更重要的是,泄露气体的在大量扩散和积聚后,人体会在无知觉的情况下吸入有害气体,最终导致安全事故发生。
3、因此,在基于专利申请号为2024113040443的一种无人机激光吊舱控制方法及无人机激光巡检装置,本发明基于其中提到的一种激光吊舱控制方法,提出一种多旋翼无人机油气管线巡检方法及系统。
技术实现思路
1、本发明的目的在于提供一种多旋翼无人机油气管线巡检方法及系统,以解决上述背景技术中提出的问题。
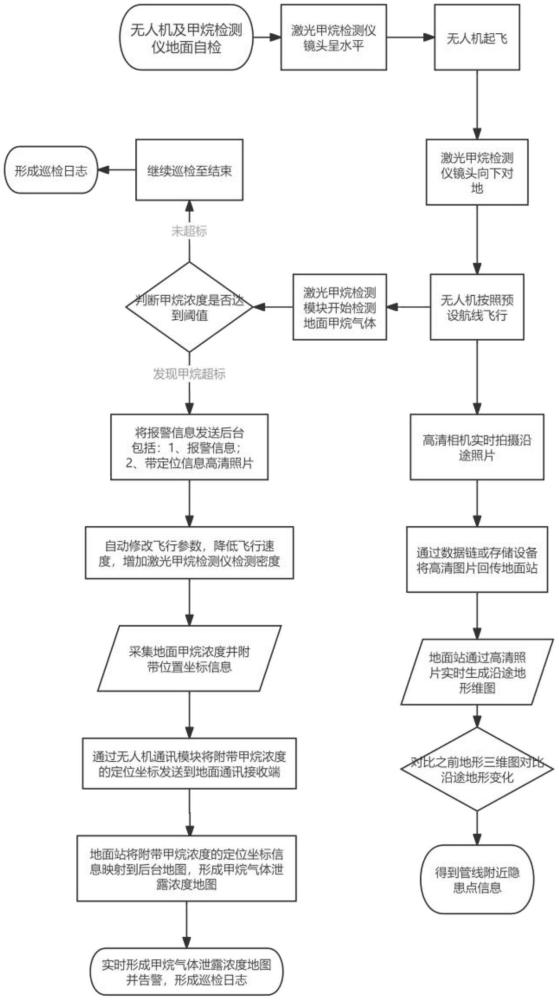
2、为实现上述目的,本发明第一方面提供一种多旋翼无人机油气管线巡检方法:
3、s1地面站利用地理信息系统(g i s)划定自动巡检路线;
4、s2多旋翼无人机搭载激光甲烷检测仪和高清相机,按照所述自动巡检路线进行自主飞行;
5、s3所述多旋翼无人机启动所述激光甲烷检测仪和高清相机,对地面进行同步扫描和图像采集;
6、s4所述多旋翼无人机实时接收所述激光甲烷检测仪输出的甲烷浓度数据,对甲烷的浓度阈值超标进行分析及处理;
7、s5若检测到该区域甲烷浓度阈值超标,飞控系统接收信号控制所述多旋翼无人机进行飞行策略调整,对该片区域进行二次研判;
8、s6所述多旋翼无人机将二次研判结果发送至所述地面站,所述地面站视情况对该片区域进行处理。
9、优选地,所述多旋翼无人机启动激光甲烷检测仪对地面进行扫描,包括以下步骤:
10、s301实时获取所述多旋翼无人机的位姿数据和所述激光甲烷检测仪相对于地面的位姿数据;
11、s302将采集数据输入至吊舱控制系统,计算所述激光甲烷检测仪的扫描角度和频率;
12、s303根据计算结果动态调整所述激光甲烷检测仪的扫描角度和频率,以优化扫描效率。
13、其中,所述激光吊舱的目标摆动角度的计算方式为:
14、
15、公式中,所述α为激光吊舱的目标摆动角度,所述h为多旋翼无人机相对于地面的高度,所述x为设定的所需扫描路径宽度;
16、所述激光吊舱的目标摆动频率的的计算公式为:
17、
18、公式中,所述f为激光检测吊舱的扫描频率,所述v为多旋翼无人机的飞行速度,所述y为设定的激光吊舱相对于地面的扫描间隔距离。
19、优选地,所述多旋翼无人机实时接收激光甲烷检测仪输出的甲烷浓度数据,对甲烷的浓度阈值超标进行分析及处理,包括以下步骤:
20、s401利用tdlas技术计算甲烷浓度数值,并与预设安全阈值进行比较;
21、s402若所述甲烷浓度数值低于预设安全阈值,所述多旋翼无人机继续沿所述预定飞行路径进行扫描,并将采集的图像数据传输至所述地面站,生成沿线高清三维地图;
22、s403若所述甲烷浓度数值高于预设安全阈值,所述多旋翼无人机触发报警机制,将包含泄露位置坐标和甲烷浓度数值的图像数据传输至所述地面站,实时生成甲烷浓度分布地图。
23、优选地,所述若检测到该区域甲烷浓度阈值超标,飞控接收信号控制多旋翼无人机进行飞行策略调整,对该片区域进行二次研判中,调整内容包括:自动降低飞行速度、增大激光甲烷检测仪扫描密度。
24、优选地,所述增大激光甲烷检测仪扫描密度,主要通过三轴云台带动激光吊舱生成密度更大的螺线投影。
25、优选地,所述若甲烷浓度数值低于预设安全阈值,多旋翼无人机继续沿预定飞行路径进行扫描,并将采集的图像数据传输至地面站,生成沿线高清三维地图,还包括:
26、所述地面站使用人工智能对比后台的数据库地图模型,标注存在隐患的地点,实时更新后台数据。
27、优选地,所述多旋翼无人机触发报警机制,将包含泄露位置坐标和甲烷浓度数值的图像数据传输至地面站,实时生成甲烷浓度分布地图中,
28、所述图像数据依靠osd技术进行整合,整合信息包括:多旋翼无人机的gps位置坐标;多旋翼无人机的飞行速度、高度和航向;激光甲烷检测仪的实时甲烷浓度数值;甲烷浓度的阈值报警状态;多旋翼无人机摄像头的实时图像,包括高清地图生成和潜在泄露点的标记。
29、优选地,所述飞控系统控制所述多旋翼无人机的飞行高度为50-200m。
30、本发明第二方面提供一种多旋翼无人机油气管线巡检系统,包括:地面站,用于划定自动巡检路线;
31、多旋翼无人机,搭载激光甲烷检测仪和高清相机;
32、激光甲烷检测仪,用于对地面进行全自主扫描规划与甲烷气体浓度数值检测;
33、高清相机,用于拍摄地面图像;
34、三轴云台和激光吊舱,用于控制所述激光甲烷检测仪、高清相机进行大范围的扫描与拍摄;
35、飞控系统,用于控制所述多旋翼无人机按照自动巡检路线进行自主飞行,以及接收甲烷气体浓度数值超标的信号,并进行飞行参数的主动调整处理;
36、gps模块,用于定位所述多旋翼无人机的实时位置;
37、多旋翼无人机端通讯数据模块,用于发送所述多旋翼无人机上的数据信息与接收所述地面站的指令信息;
38、地面端通讯模块,用于接收所述多旋翼无人机的数据信息与发送指令信息。
39、优选地,还包括有多旋翼无人机上数据链路信息,多旋翼无人机上数据链路信息通过多旋翼无人机和地面站专用链路进行远距离传输,使用自组网链路,4g模块,中继,卫星通信中任一通讯传输方式。
40、与现有技术相比,本发明的有益效果是:本发明中的多旋翼无人机通过搭载激光甲烷检测仪,具备了快速扫描地形、检测地面甲烷浓度的能力,并通过自组网络将高清相机所拍摄的图像信息进行整合,实时传输到地面站,快速生成沿线高清三维地图,有利于判断沿线地形变化,预防沿线地质灾害和人为破坏;
41、本发明中的多旋翼无人机具有飞控系统以及避障,实现对多旋翼无人机的动态调整,保持与地面的恒定高差,实现多旋翼无人机的仿地飞行,保证其甲烷浓度检测数值的精准,同时还配备有避障功能,使多旋翼无人机在飞行过程中能对沿途巡检线路上的一些障碍物自动避让绕行,保证其安全飞行;
42、本发明中的多旋翼无人机还可以根据预设的线路进行仿地低空自动飞行,实现一次飞行便可同时完成地形地质扫描和甲烷气体泄露扫描,减少无人机飞行架次,提高巡检效率,大大节省巡检成本;
43、本发明中,当甲烷浓度数值高于预设安全阈值时,会采集的图像信息、甲烷浓度检测数值通过多旋翼无人机端通讯模块实时传输到地面站时,还需提前对超标点的定位坐标,甲烷泄露值等数据整合至该超标点的拍照图像上,使得地面站能够在一目了然的掌握超标点的详细信息,从而迅速做出判断,采取有效的应对措施;
44、本发明中在检测到沿线出现天然气泄露后,还会将甲烷泄露信号信息传至无人机飞控,做出包括但不限于降低飞行速度,增加激光甲烷吊舱扫描宽度,增加激光甲烷吊舱扫描间距等可提高检测精准度的相关动作,为后续的应急处理提供更加全面的数据支持,数据实时传输至地面站后,不断对甲烷浓度分布地图进行完善与更新,以便工作人员能够通过甲烷浓度和分布范围针对性的进行人员部署,精准找到泄露地点,并进行精确化操作。
- 还没有人留言评论。精彩留言会获得点赞!