基于模糊匹配摄像头视频流和概率云计算的路径避障方法与流程
本发明涉及路径避障,具体涉及基于模糊匹配摄像头视频流和概率云计算的路径避障方法。
背景技术:
1、工厂运输机器人的发展在制造业和物流行业中成为重要趋势,特别是在推动智能工厂建设、提高生产效率和降低人工成本方面具有显著作用。随着技术的不断进步,这些机器人正朝着更加灵活、高效、智能的方向发展,能够适应复杂的工作环境和要求。随着智能制造和智能物流的崛起,工厂运输机器人正在朝着更加多功能化和灵活化的方向发展,因此对工厂运输机器人的路径避障方法的研究是有必要的。
2、现有技术中对于工厂运输机器人的路径避障可以满足基本要求,但是也存在着一些潜在问题,具体表现为以下几个方面,一方面:工厂运输机器人一般采用地面上铺设磁条,机器人的底部安装有磁感应器,通过检测磁条来跟踪和维持行驶路径,或使用地面上的色带或颜色线,机器人通过光电传感器识别路径,引导其行进。在遇见障碍物时,无法及时识别障碍物的状态并作出路径重新规划,导致工厂运输机器人无法继续工作,降低工厂运输效率,不满足实际应用需求。
3、另一方面,现有技术中一部分对于运输机器人的工作路径采用在工厂环境中设置激光反射板,机器人通过内置激光扫描器识别这些反射器的位置来校正和维持自身的位置,这种方法提供了更高的路径灵活性和精确度,但通常需要更加复杂的初期安装和校准,而且在障碍物的识别效率低下,无法清楚获知障碍物的具体信息,判断是否能够继续通行,作出路径的及时调整,不满足智慧工厂的建设需求,导致运输机器人无法高效工作。
技术实现思路
1、本发明的目的在于提供基于模糊匹配摄像头视频流和概率云计算的路径避障方法,解决了背景技术中存在的问题。
2、为解决上述技术问题,本发明采用如下技术方案:基于模糊匹配摄像头视频流和概率云计算的路径避障方法,所述方法包括:
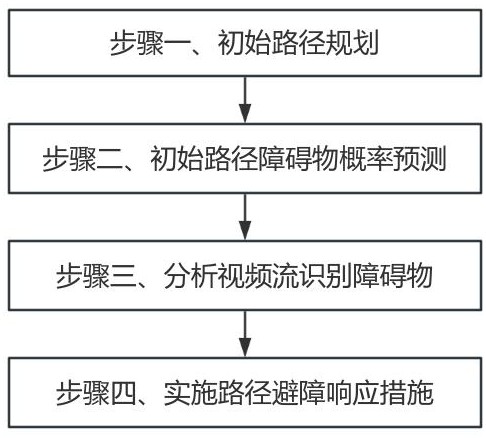
3、步骤一、初始路径规划:获取工厂运输机器人的各工作数据、各待选路径的各信息数据,计算各待选路径的匹配指数,规划工厂运输机器人的初始路径;
4、步骤二、初始路径障碍物概率预测:获取初始路径的历史各次障碍物出现的位置,分析各次障碍物出现的位置概率,划分初始路径上的障碍物风险区域;
5、步骤三、分析视频流识别障碍物:获取工厂运输机器人工作过程中的视频流,通过模糊匹配方法识别路径上的障碍物,并对路径上的障碍物进行分类,得到静态类型障碍物和动态类型障碍物;
6、步骤四、实施路径避障响应措施:获取路径上的静态类型障碍物的各信息数据,基于工厂运输机器人的各信息数据,计算工厂运输机器人避障判断值,实施静态类型障碍物避障响应措施,获取路径上的动态类型障碍物的各未来路径的概率值,实施动态类型障碍物避障响应措施。
7、进一步地,所述计算各待选路径的匹配指数,其具体分析方法为:
8、所述工厂运输机器人的各工作数据,包括工厂运输机器人的宽度、运输要求时长;
9、所述各待选路径的各信息数据,包括各待选路径的最大宽度、最小宽度、历史各运输过程中障碍物的数量、历史各次运输时长,其中,表示各待选路径的编号,表示待选路径的总数,,表示历史各运输过程的编号,表示历史运输过程的总数;
10、将各待选路径的历史各运输过程中障碍物的数量进行均值处理,均值结果作为各待选路径历史平均障碍物的数量;
11、通过公式:,计算得到各待选路径宽度符合状态值,通过公式:,计算得到各待选路径的匹配指数,其中表示预设置的路径障碍物的可接受数量,表示指数函数标识符,表示对数函数标识符。
12、进一步地,所述规划工厂运输机器人的初始路径,其具体分析方法为:
13、基于各待选路径的匹配指数进行排序,选择最大匹配指数的下标对应的待选路径,记为工厂运输机器人的初始路径;
14、从数据库中获取工厂运输机器人的初始路径的指令信息,发送至工厂运输机器人的控制中心,工厂运输机器人进行运输工作。
15、进一步地,所述划分初始路径上的障碍物风险区域,其具体分析方法为:
16、将工厂运输机器人出发位置设为原点坐标,正对竖直方向为纵轴,水平向右方向为横轴,建立工厂运输机器人初始路径的二维坐标系;
17、从数据库中提取初始路径的历史各次障碍物出现的位置,经过位置转换映射到二维坐标系中,得到初始路径的历史各次障碍物出现的位置坐标,其中,表示初始路径的历史各次障碍物出现的编号,表示初始路径的历史障碍物出现的总数;
18、基于初始路径的历史各次障碍物出现的位置坐标,统计位于第次障碍物出现的区域内的障碍物总数,同理得到各次障碍物出现的区域内的障碍物总数,通过公式:,计算得到第次障碍物出现的位置坐标区域内障碍物概率,其中,表示障碍物出现的区域的平面数学符号,表示预设置的判断范围尺度;
19、若,则划分初始路径上第次障碍物出现的区域为风险区域,其中,表示障碍物概率判断阈值;
20、反之则划分初始路径上第次障碍物出现的区域为一般区域。
21、进一步地,所述识别路径上的障碍物,并对路径上的障碍物进行分类,其具体分析方法为:
22、获取工厂运输机器人的视频流,进行帧处理,对于风险区域的视频流,将帧处理提取间隔设置为,对于一般区域的视频流,将帧处理提取间隔设置为,得到工厂运输机器人的视频流的各帧图像,通过深度学习模型对工厂运输机器人的视频流的各帧图像进行目标检测,分割出场景中的障碍物;
23、分析工厂运输机器人的视频流的各帧图像中的障碍物各像素点,通过公式:,计算得到连续帧之间的差异值,其中表示工厂运输机器人的视频流的当前帧第个像素点坐标,工厂运输机器人的视频流的上一帧第个像素点坐标,,表示工厂运输机器人的视频流的帧中的各像素点的编号,表示工厂运输机器人的视频流的帧中的像素点的总数;
24、若,则判定第个像素点为动态区域,该障碍物为动态类型障碍物,其中,表示从数据库中获取的连续帧的差异阈值;
25、反之,则判断第个像素点为静态区域,该障碍物为静态类型障碍物;
26、综上所述,得到工厂运输机器人的初始路径上的障碍物及其类型。
27、进一步地,所述路径上的静态类型障碍物的各信息数据,其具体分析方法为:
28、基于工厂运输机器人的视频流中各帧图像进行目标检测,获取静态类型障碍物的占用路径的宽度、静态类型障碍物所处路径的宽度。
29、进一步地,所述计算工厂运输机器人避障判断值,实施静态类型障碍物避障响应措施,其具体分析方法为:
30、基于静态类型障碍物的占用路径的宽度、工厂运输机器人的宽度、静态类型障碍物所处路径的宽度,通过公式:,计算得到初始路径可通行判断值;
31、若,则判断初始路径允许通行,运输机器人进行运动偏移,躲避静态障碍物;
32、若,则判断初始路径不允许通行,执行临时避障路径。
33、进一步地,所述临时避障路径,其具体分析方法为:
34、从数据库中提取目标位置的坐标,基于运输机器人无法通过点的位置坐标,生成临时避障路径,将临时避障路径的指令信息发送至运输机器人的控制中心,运输机器人执行临时避障路径。
35、进一步地,所述路径上的动态类型障碍物的各未来路径的概率,其具体分析方法为:
36、通过模糊匹配算法,生成动态障碍物的各未来路径,通过概率云模型:,计算各未来路径的概率值,其中表示各未来路径上的一个点坐标向量,表示各未来位置坐标向量,表示离散度,π表示圆周率。
37、进一步地,所述实施动态类型障碍物避障响应措施,其具体分析方法为:
38、基于各未来路径的概率值,工厂运输机器人选择一条避开障碍物的路径。
39、相对于现有技术,本发明具有以下益处:第一、本发明根据历史初始化路径上的障碍物信息,进行初始化路径上的风险区域进行划分,在运输机器人到达风险区域时,采取更精细的图像识别,判断是否存在障碍物以及具体的类型,便于及时作出路径避障,满足工厂运输机器人的智能化和高效性,提高工厂生产效率。
40、第二、本发明采用模糊识别的方式,模糊逻辑的非精确性来处理实际应用中的不确定因素和模糊性,能够显著提高对复杂场景中障碍识别、跟踪和分类精度。
41、第三、本发明在路径规划和避障问题上使用概率方法,可以为不同路径分配一个概率值,这个值表示路径的可行性或者风险,通过云计算,可以对大量的可能路径进行计算和评估,选择风险最小、代价最优的路径,能够及时应对障碍物路径重新规划的问题。
- 还没有人留言评论。精彩留言会获得点赞!