热并行多余度飞控系统的飞控指令管理方法、系统及介质与流程
本发明涉及飞行器安全,具体涉及热并行多余度飞控系统的飞控指令管理方法、系统及介质。
背景技术:
1、飞行器的高可靠性和安全性始终是该领域从业者孜孜以求的目标,近年来,高价值、大比例无人机和试验飞行器的不断涌现,可靠性在无人航空飞行器的设计过程中也得到了更加重要的认识。
2、多余度技术是为满足可靠性和故障容限的要求,采用两个或两个以上的同样部件或系统,正确、协调地完成同一任务的技术手段。随着工程技术的发展,多余度技术在多个行业和领域均能找到其应用的身影。而在航空无人飞行器领域,余度技术的应用遍布于飞行器的各分系统,由多个飞控计算机采用余度技术构建的多余度飞控系统在提升飞行器可靠性方面发挥着重要作用。
3、多余度飞控系统按工作模型可分为:主热备份模式和热并行模式两种模式,如图2所示。其中主热备份模式指系统仅通过一个主节点执行任务,其余节点作为冗余备份,仅当主节点故障时启用;因此主热备份模式需要较高的故障检测覆盖率以及高效的通道切换机制,才能保证系统在切换空档期的稳定性。热并行模式是指各冗余通道同时执行相同的任务,采用多余度表决机制完成最终结果的选择和正确输出,由于是信号选择的工作模式,故不存在系统切换所导致的空档期,但也使得最终执行的各控制通道指令来自不同飞控,存在潜在的指令协调性问题和奇异状态问题。
4、飞行器控制存在通道协调的控制要求,例如纵向控制与速度控制协调,横向控制与航向控制协调等,控制律设计时也考虑了相关要求。热并行模式采用的是控制通道余度管理的方式,即按通道(如推力控制、副翼控制、升降舵控制、方向舵控制等)对飞控指令进行独立的表决,也意味着最终表决并作用到作动器的通道指令是来源于不同飞控的指令,由此便产生了通道协调性的潜在风险。
技术实现思路
1、本发明所要解决的技术问题是:传统的热并行模式运行中,各控制通道飞控指令来自不同飞控,执行过程中存在潜在的飞控指令协调性问题和奇异故障状态,并且奇异故障状态难以有效甄别的问题;本发明目的在于提供热并行多余度飞控系统的飞控指令管理方法、系统及介质,针对飞控指令协调性和奇异故障状态缺乏有效信息进行甄别的难点,在原有余度管理方法的基础上,通过对故障状态的通道实时进行隔离与恢复状态监控,参考通道状态结果进行飞控状态评估实现飞控状态评估,并将飞控状态评估结果用于飞控输出信号的表决中,对通道表决机制进行优化,为从安全信号中选出优质飞控指令提供参考,解决奇异故障无法甄别的问题,同时提升通道间协调性。
2、本发明通过下述技术方案实现:
3、本方案提供热并行多余度飞控系统的飞控指令管理方法,包括:
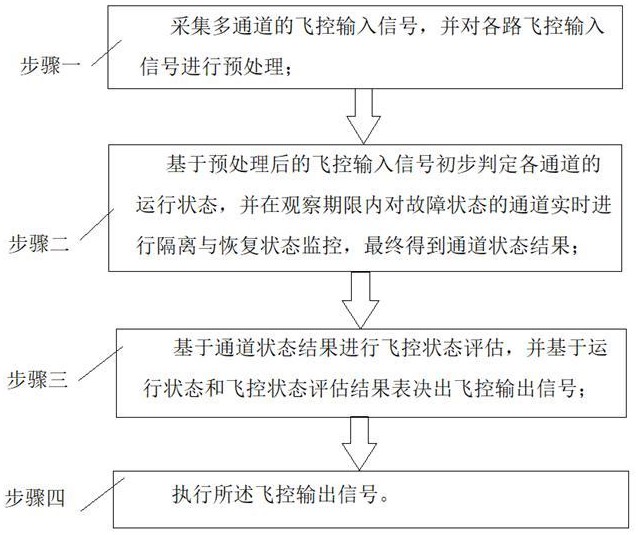
4、采集多通道的飞控输入信号,并对各路飞控输入信号进行预处理;
5、基于预处理后的飞控输入信号初步判定各通道的运行状态,并在观察期限内对故障状态的通道实时进行隔离与恢复状态监控,最终得到通道状态结果;
6、基于通道状态结果进行飞控状态评估,并基于运行状态和飞控状态评估结果表决出飞控输出信号;
7、执行所述飞控输出信号。
8、进一步优化方案为,所述预处理的方法包括:
9、比较各路飞控输入信号的大小;
10、按照从小到大的顺序对各路飞控输入信号进行排序,并对每路飞控输入信号进行编号;对于大小相等的飞控输入信号,随机设置排列顺序。
11、进一步优化方案为,所述运行状态包括:正常状态和故障状态;
12、对于故障状态的通道在隔离与恢复状态监控过程中包括:瞬时故障状态、恢复缓冲状态和永久故障状态。
13、进一步优化方案为,所述基于预处理后的飞控输入信号初步判定各通道的运行状态,包括方法:
14、t1,由四个完全一样的飞控计算机组成的多余度飞控系统对于每类飞控信号都将产生4路,即每种飞控输入信号的通道数为4路,并以4路通道对应飞控输入信号的编号作为通道编号,通道1~通道4;通道编号越大,按预处理结果,对应飞控输入信号越大;
15、计算通道i与通道j对应飞控输入信号间的差值cij=cj-ci;i=1,2,3;j=1,2,3,4;i<j;
16、t2,判断差值c14与比较阈值e的大小,若差值c14≤比较阈值e,则判定通道1~通道4均为正常状态;否则进入t3;
17、t3,分别判断差值c13与比较阈值e之间,差值c24与比较阈值e之间的大小;
18、若差值c13>比较阈值e,且差值c24≤比较阈值e,则判定通道1为故障状态、且通道2~通道4为正常状态;
19、若差值c13≤比较阈值e,且差值c24>比较阈值e,则判定通道4为故障状态、且通道1~通道3均为正常状态;
20、若差值c13>比较阈值e,且差值c24>比较阈值e,则进入步骤t4;
21、若差值c13≤比较阈值e,且差值c24≤比较阈值e,则进入步骤t5;
22、t4,判断差值c23与比较阈值e的大小;若差值c23≤比较阈值e,则判定通道1和通道4为故障状态、且通道1和通道3为正常状态;否则,进入步骤t6;
23、t5,计算差值c24与差值c34的和c24+c34、差值c12与差值c13的和c12+c13;
24、若c24+c34>c12+c13,则判定通道4为故障状态,且通道1~通道3均为正常状态;
25、若c24+c34=c12+c13,则判定通道1和通道4为故障状态,且通道2和通道3为正常状态;
26、若c24+c34<c12+c13,则判定通道1为故障状态,且通道2~通道4为正常状态;
27、t6,分别判断差值c34与比较阈值e之间、差值c21与比较阈值e之间的大小;
28、若差值c34>比较阈值e,且差值c21≤比较阈值e;则判定通道3和通道4为故障状态,且通道1和通道2为正常状态;
29、若差值c34≤比较阈值e,且差值c21≤比较阈值e;则判定所有通道为奇异故障状态;
30、若差值c34>比较阈值e,且差值c21>比较阈值e;则判定所有通道为奇异故障状态;
31、若差值c34≤比较阈值e,且差值c21>比较阈值e;则判定通道1和通道2为故障状态,且通道3和通道4为正常状态。
32、进一步优化方案为,所述在观察期限内对故障状态的通道实时进行隔离与恢复状态监控,最终得到通道状态结果,包括方法:
33、对于判定为故障状态的通道进行隔离监控,将故障状态的通道对应的飞控输入信号进行隔离,故障状态的通道对应的飞控输入信号不参与后续表决过程。
34、监控过程包括:将通道对应的飞控输入信号与比较阈值e进行多周期比对观察;
35、在观察期限内,若当前通道由正常状态转为瞬时故障状态,且在连续m个比对周期内,依旧判定为故障状态,则判定当前通道为永久故障状态;
36、对于瞬时故障状态的通道,若下一个比对周期恢复为正常状态,则判定当前通道为恢复缓冲状态;
37、处于恢复缓冲状态的通道,若连续n个比对周期均判定为正常状态时,则判定当前通道转为正常状态。
38、这种方法以瞬时故障发生及恢复周期作为区分瞬时故障与永久故障的标准,同时给恢复后的瞬时故障设置“观察期”,这样在故障恢复的同时也保证了系统的可靠性与运行稳定性。
39、进一步优化方案为,所述在观察期限内对故障状态的通道实时进行隔离与恢复状态监控,最终得到通道状态结果,还包括方法:
40、在观察期限结束后,若所有通道均为正常状态,得到四余度条件;若有三个通道为正常状态,得到三余度条件;若有二个通道为正常状态,得到二余度条件。
41、进一步优化方案为,所述飞控状态评估结果的获取方法包括:
42、对每种飞控输入信号配置一个通道表决器;
43、对于第i个通道表决器,获取各通道的通道状态结果;
44、基于通道状态结果获取各通道对应飞控输入信号的信号评估值 q ia;其中a为通道编号,a=1,2,3,4;
45、各通道表决器进行交互得到所有飞控输入信号的评估值矩阵e;
46、基于评估值矩阵获得飞控状态评估结果。
47、本方案还提供热并行多余度飞控系统的飞控指令管理系统,用于实现上述的热并行多余度飞控系统的飞控指令管理方法,所述系统包括:
48、预处理模块,用于采集多通道的飞控输入信号,并对各路飞控输入信号进行预处理;
49、监控模块,用于基于预处理后的飞控输入信号初步判定各通道的运行状态,并在观察期限内对故障状态的通道实时进行隔离与恢复状态监控,最终得到通道状态结果;
50、表决模块,用于基于通道状态结果进行飞控状态评估,并基于运行状态和飞控状态评估结果表决出飞控输出信号;
51、执行模块,用于执行所述飞控输出信号。
52、本方案还提供一种计算机可读介质,其上存储有计算机程序,所述计算机程序被处理器执行可实现如上述的热并行多余度飞控系统的飞控指令管理方法。
53、本发明与现有技术相比,具有如下的优点和有益效果:
54、本发明提供的热并行多余度飞控系统的飞控指令管理方法、系统及介质;针对飞控指令协调性和奇异故障状态缺乏有效甄别的难点,在原有余度管理方法的基础上,通过对故障状态的通道实时进行隔离与恢复状态监控,参考通道状态结果进行飞控状态评估实现飞控状态评估,并将飞控状态评估结果用于飞控输出信号的表决中,对通道表决机制进行优化,为从安全信号中选出优质飞控指令提供参考,解决奇异故障无法甄别的问题,同时提升通道间协调性。
- 还没有人留言评论。精彩留言会获得点赞!