无人化物联网车间货物运送机器人调度方法及系统与流程
本发明涉及运送调度,具体是一种无人化物联网车间货物运送机器人调度方法及系统。
背景技术:
1、随着自动化和智能化技术的发展,无人化车间逐渐普及,无人化车间也称为“智能化车间”或“无人车间”,是指通过自动化、人工智能和先进的生产设备,实现车间内生产流程的全自动化和智能化,从而不需要人类工人直接参与操作,现有技术大都是对各个固定工位处的工作进行智能化扩展,对于物料运送过程,大都基于控制电机驱动的传送带完成,这适合批量的常规物料,对于某些少见的非常规物料,就需要引入货物运送机器人进行配送;现有的机器人货物运送路径大都采用预设的固定路径,与实际情况的契合度不高,当现场情况变化时,很难及时调整,如何提供一种与现场情况更加契合的动态调度方案是本发明技术方案想要解决的技术问题。
技术实现思路
1、本发明的目的在于提供一种无人化物联网车间货物运送机器人调度方法及系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种无人化物联网车间货物运送机器人调度方法,所述方法包括:
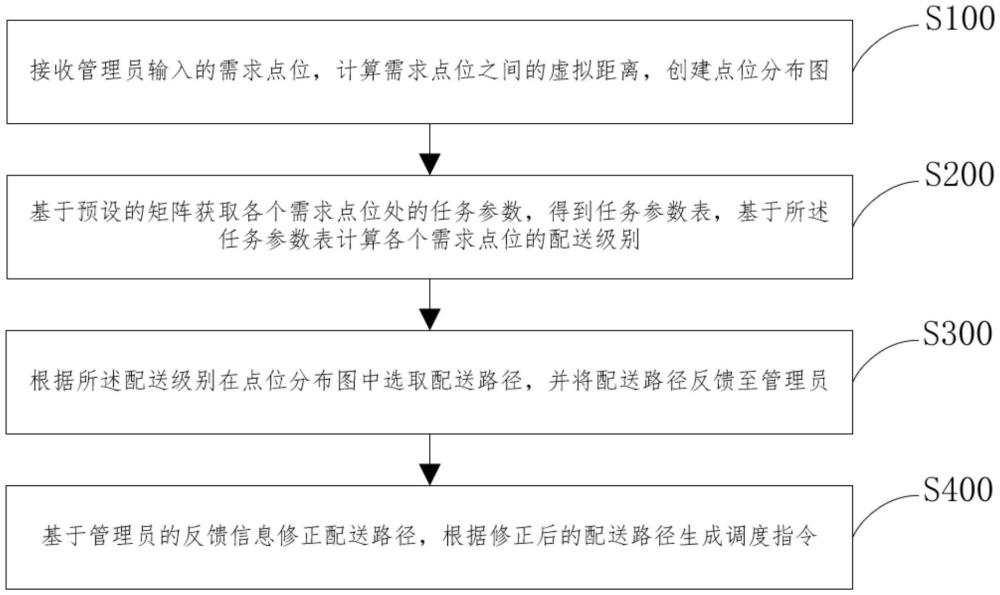
4、接收管理员输入的需求点位,计算需求点位之间的虚拟距离,创建点位分布图;所述点位分布图包括与需求点位一一对应的节点,节点之间存在有向线,线的长度与虚拟距离相关;
5、基于预设的矩阵获取各个需求点位处的任务参数,得到任务参数表,基于所述任务参数表计算各个需求点位的配送级别;
6、根据所述配送级别在点位分布图中选取配送路径,并将配送路径反馈至管理员;
7、基于管理员的反馈信息修正配送路径,根据修正后的配送路径生成调度指令。
8、作为本发明进一步的方案:所述接收管理员输入的需求点位,计算需求点位之间的虚拟距离,创建点位分布图的步骤包括:
9、获取物联网车间的bim模型,基于bim模型接收管理员选取的需求点位;
10、根据物联网车间的监控系统定位运动物体,获取运动物体的物体类型及其运动轨迹;
11、对所有需求点位进行两两配对,得到点位组,基于点位组截取运动轨迹,获取截取到的运动轨迹的时间跨度,并查询对应的物体类型;
12、根据物体类型在预设的速度表中查询标准速度,由标准速度乘以时间跨度,计算虚拟距离;
13、在bim模型中连接需求点位,基于虚拟距离确定模长,创建有向线;连接需求点位的过程记录起点和终点,有向线的方向为起点指向终点。
14、作为本发明进一步的方案:所述基于预设的矩阵获取各个需求点位处的任务参数,得到任务参数表,基于所述任务参数表计算各个需求点位的配送级别的步骤包括:
15、接收管理员输入的指标,将指标作为列,创建矩阵;
16、将矩阵向需求点位处的交互端发送,接收交互端反馈的任务参数,得到任务参数表;所述任务参数是各个指标下的数据;任务参数表中的每一行均与一个需求点位对应;
17、对任务参数表进行自识别,确定各项指标的动态权重;
18、基于动态权重累计各行数据,得到各个需求点位的累计值,根据累计值确定需求点位的配送级别;
19、其中,所述动态权重与各指标的所有数据的标准差呈正比。
20、作为本发明进一步的方案:所述将矩阵向需求点位处的交互端发送,接收交互端反馈的任务参数,得到任务参数表的步骤包括:
21、读取前一时刻的任务参数表,基于前一时刻的任务参数表确定各个需求点位与其他需求点位的相关数组;所述相关数组中的每一个数值均与一个指标对应,每一个数值用于确定对应指标值与其他需求点位的同一指标的指标值的映射关系;
22、接收交互端反馈的任务参数,得到任务参数表;
23、基于每个需求点位的相关数组对任务参数表进行数据补齐;
24、相关数组的数值为:a[j]=αn[j]/ej;式中,a[j]为相关数组中的第j个数值,n[j]为该需求点位的第j个指标下的数据,ej为任务参数表中第j列数据的均值,α为预设的修正系数。
25、作为本发明进一步的方案:所述根据所述配送级别在点位分布图中选取配送路径,并将配送路径反馈至管理员的步骤包括:
26、接收管理员选取的起点,基于起点依次连接各个需求点位,随机生成预设数量的备选路径;
27、根据点位分布图中的有向线计算备选路径的路径长度;
28、依次查询备选路径中各点位的配送级别,得到级别数组,根据级别数组确定效用值;
29、根据所述路径长度和所述效用值在备选路径中选取最佳路径,作为配送路径,并将配送路径反馈至管理员;
30、其中,最佳路径的选取标准为:选取评分最高的备选路径作为最佳路径;所述评分的计算过程为:
31、式中,f为备选路径的评分,β为预设的修正系数,k为需求点位的总数,δk为级别数组中第k个级别与预设的标准数组中第k个级别之间的差值级别,所述标准数组将级别数组中所有级别进行降序排列后得到的数组;表示效用值,x为备选路径的路径长度。
32、作为本发明进一步的方案:所述基于管理员的反馈信息修正配送路径,根据修正后的配送路径生成调度指令的步骤包括:
33、接收管理员发送的反馈信息,修正配送路径;
34、同步更新最佳路径的选取过程;
35、根据修正后的配送路径生成调度指令。
36、本发明技术方案还提供了一种无人化物联网车间货物运送机器人调度系统,所述系统包括:
37、点位统计模块,用于接收管理员输入的需求点位,计算需求点位之间的虚拟距离,创建点位分布图;所述点位分布图包括与需求点位一一对应的节点,节点之间存在有向线,线的长度与虚拟距离相关;
38、配送级别确定模块,用于基于预设的矩阵获取各个需求点位处的任务参数,得到任务参数表,基于所述任务参数表计算各个需求点位的配送级别;
39、配送路径生成模块,用于根据所述配送级别在点位分布图中选取配送路径,并将配送路径反馈至管理员;
40、配送路径修正模块,用于基于管理员的反馈信息修正配送路径,根据修正后的配送路径生成调度指令。
41、作为本发明进一步的方案:所述点位统计模块包括:
42、点位接收单元,用于获取物联网车间的bim模型,基于bim模型接收管理员选取的需求点位;
43、物体定位单元,用于根据物联网车间的监控系统定位运动物体,获取运动物体的物体类型及其运动轨迹;
44、点位配对单元,用于对所有需求点位进行两两配对,得到点位组,基于点位组截取运动轨迹,获取截取到的运动轨迹的时间跨度,并查询对应的物体类型;
45、虚拟距离计算单元,用于根据物体类型在预设的速度表中查询标准速度,由标准速度乘以时间跨度,计算虚拟距离;
46、点位连接单元,用于在bim模型中连接需求点位,基于虚拟距离确定模长,创建有向线;连接需求点位的过程记录起点和终点,有向线的方向为起点指向终点。
47、作为本发明进一步的方案:所述配送级别确定模块包括:
48、矩阵创建单元,用于接收管理员输入的指标,将指标作为列,创建矩阵;
49、任务参数获取单元,用于将矩阵向需求点位处的交互端发送,接收交互端反馈的任务参数,得到任务参数表;所述任务参数是各个指标下的数据;任务参数表中的每一行均与一个需求点位对应;
50、权重生成单元,用于对任务参数表进行自识别,确定各项指标的动态权重;
51、数据累计应用单元,用于基于动态权重累计各行数据,得到各个需求点位的累计值,根据累计值确定需求点位的配送级别;
52、其中,所述动态权重与各指标的所有数据的标准差呈正比。
53、作为本发明进一步的方案:所述配送路径生成模块包括:
54、路径随机生成单元,用于接收管理员选取的起点,基于起点依次连接各个需求点位,随机生成预设数量的备选路径;
55、长度计算单元,用于根据点位分布图中的有向线计算备选路径的路径长度;
56、效用值计算单元,用于依次查询备选路径中各点位的配送级别,得到级别数组,根据级别数组确定效用值;
57、选取执行单元,用于根据所述路径长度和所述效用值在备选路径中选取最佳路径,作为配送路径,并将配送路径反馈至管理员;
58、其中,最佳路径的选取标准为:选取评分最高的备选路径作为最佳路径;所述评分的计算过程为:
59、式中,f为备选路径的评分,β为预设的修正系数,k为需求点位的总数,δk为级别数组中第k个级别与预设的标准数组中第k个级别之间的差值级别,所述标准数组将级别数组中所有级别进行降序排列后得到的数组;表示效用值,x为备选路径的路径长度。
60、与现有技术相比,本发明的有益效果是:本发明基于矩阵统计各个需求点位处的任务参数,得到任务参数表,对所述任务参数表进行自识别,确定各个指标的动态权重,进而调节路径的选取过程,极大地提高了路径与实际情况的契合度。
- 还没有人留言评论。精彩留言会获得点赞!