带有无人机建图辅助的水上救援机器人系统及方法
本发明涉及水上救援设备,尤其涉及带有无人机建图辅助的水上救援机器人系统及方法。
背景技术:
1、水上救援作业一直以来都是救援领域中的重要组成部分,其复杂性和多变性对救援设备和技术提出了极高的要求。传统的水上救援手段主要依赖于人力和简单的机械设备,如救生艇、救生圈等,这些方式在面对复杂的水域环境和多变的天气条件时,往往显得力不从心,救援效率低下,且存在一定的安全风险。
2、随着科技的发展,水上救援机器人逐渐成为该领域的新宠。现有技术中,已经出现了多种类型的水上救援机器人,它们能够在一定程度上替代人力,执行更为复杂和危险的救援任务。这些机器人通常具备基本的移动能力和导航功能,能够按照预设的路线或指令前往救援区域,执行拖拽、打捞等救援操作。
3、然而,尽管现有技术中的水上救援机器人取得了一定的进展,但仍存在一些明显的问题和局限性。例如,大多数水上救援机器人缺乏对环境变化的实时感知能力,无法根据救援区域的实际环境信息动态调整救援路径和策略。这导致在实际救援过程中,机器人可能会遇到无法预见的障碍物或危险情况,从而影响救援效率甚至导致救援失败。
4、此外,现有技术中的水上救援机器人在与其他救援设备或系统的协同作战方面也存在不足。在实际救援行动中,往往需要多种救援设备和系统的相互配合,以实现最佳的救援效果。然而,由于技术限制和通信障碍,现有的水上救援机器人往往难以与其他救援设备或系统进行有效的信息共享和协同作战,这限制了救援行动的整体效能。
5、为了解决上述问题,国内外的研究人员进行了大量的研究和探索。例如cn215043563u公开了一种水上救援机器人,包括机器本体、供电系统和核心控制器,所述核心控制器分别与传感器系统和执行系统电性连接,所述传感器系统包括视觉模块和导航定位模块,所述执行系统包括电机驱动装置和救生圈锁扣盘,所述传感器系统还包括避障模块。该水上救援机器人,可实现对落水者的快速准确检测并获取位置,进行最快路径规划并对沿途障碍物进行识别,快速到达落水者身边,机械结构转动,救生圈落下,实现救援,还拥有远程控制模式和自动报警功能,提高救援成功率,机器人的动力由太阳能供电系统提供,做到绿色环保;该机器人能够通过摄像头捕捉救援区域的图像信息,并进行简单的图像处理和分析,以辅助救援操作;然而,该专利的技术方案仍然存在一定的局限性,如机器视觉系统对环境光照条件的依赖较高,且在复杂的水域环境中容易受到干扰和影响。
6、综上所述,现有技术中的水上救援机器人在实时环境感知、路径规划、协同作战等方面仍存在明显的不足和局限性。因此,有必要研发一种更为先进、高效的水上救援机器人系统,以克服现有技术的缺陷,提高救援行动的效率和成功率。
技术实现思路
1、本发明所要解决的技术问题是,提供带有无人机建图辅助的水上救援机器人系统及方法,解决水上救援作业中面临的复杂多变自然环境导致的救援难度大、救援路径规划不优化、救援效率受限的具体问题。
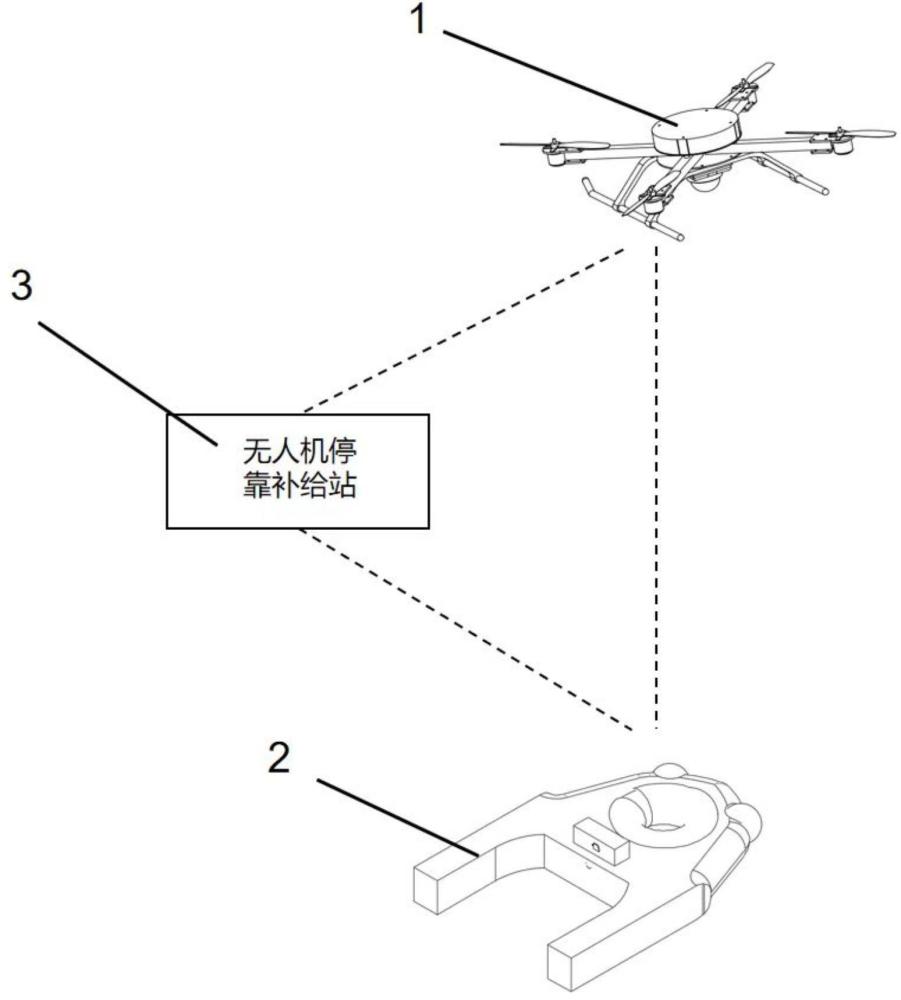
2、为解决上述技术问题,本发明采用的技术方案为:带有无人机建图辅助的水上救援机器人系统,包括:
3、水上救援机器人主体,具备自主导航和稳定移动能力,能在水上执行拖拽、打捞等救援任务,机体设计有防水密封结构以保护内部电子元件;
4、无人机子系统,用于对救援区域进行环境扫描与地图构建,且无人机子系统具备较长的续航能力和稳定的飞行性能;
5、无人机停靠补给站,固定在救援区域附近的合适位置,包含控制系统与供电系统,用于无人机的调度、充电及数据交换;
6、所述水上救援机器人主体、无人机子系统及无人机停靠补给站之间通过无线通讯协议进行数据交换,形成一个协同工作的整体。
7、优选的方案中,所述水上救援机器人主体还装备有gps导航系统和避障传感器,用于基础导航与安全保障。
8、优选的方案中,所述无人机子系统定期或按需从补给站起飞,对救援区域进行全方位扫描,收集环境数据,通过算法处理生成或更新救援区域的数字地图,包括障碍物位置、水深信息。
9、优选的方案中,所述无人机停靠补给站内置有无人机控制系统,用于无人机的起飞、降落调度及任务规划,并将无人机收集的扫描数据上传至云端数据中心进行进一步处理或存储。
10、优选的方案中,所述水上救援机器人主体根据无人机子系统提供的最新地图信息,自动或手动调整救援路径与策略,以实现更高效、安全的救援行动。
11、优选的方案中,在紧急情况下,所述无人机子系统快速起飞,为水上救援机器人主体提供即时环境信息,辅助其快速定位并接近救援目标。
12、优选的方案中,所述系统支持通过云端平台对救援机器人主体和无人机子系统进行远程监控与操控,便于救援指挥中心实时掌握现场情况并做出正确决策。
13、优选的方案中,所述系统通过无人机对救援区域环境的动态监测与地图更新,显著提升了水上救援机器人主体的作业效率与决策准确性。
14、优选的方案中,所述系统通过构建包含水上救援机器人主体、无人机子系统、无人机停靠补给站及云端数据中心的生态系统,实现了救援过程中的无缝协作与高效响应。
15、带有无人机建图辅助的水上救援方法,是应用上述任意一项所述的带有无人机建图辅助的水上救援机器人系统,所述方法包括以下步骤:
16、step1:无人机定时扫描,根据预设计划或环境条件变化,无人机自动从补给点起飞,对救援区域进行全方位扫描,收集环境数据;
17、step2:地图构建与更新,将无人机收集的数据通过算法处理,生成或更新救援区域的数字地图,包括障碍物位置、水深信息等;
18、step3:数据传输,将更新后的地图信息通过无线方式传输至水上救援机器人的控制系统中;
19、step4:救援方案优化,水上救援机器人根据最新的地图信息,自动或手动调整救援路径与策略,实现更高效、安全的救援行动。
20、本发明提供的带有无人机建图辅助的水上救援机器人系统及方法,有如下有益效果:
21、1、本发明解决了水上救援作业中面临的复杂多变自然环境导致的救援难度大、救援路径规划不优化、救援效率受限的具体问题;传统的水上救援手段在面对如水流湍急、视野受限等复杂环境时,往往力不从心;而本发明通过引入无人机建图辅助功能,实现了对救援区域环境的动态监测与地图更新,从而显著提升了救援的准确性和效率;
22、2、本发明采用的无人机建图辅助功能,通过无人机定期对作业区域进行环境扫描,收集环境数据;这些数据包括水域表面的地形、障碍物位置、水深信息等,对于救援行动至关重要;无人机收集的数据经过算法处理,能够生成或更新救援区域的数字地图。救援机器人可以根据这些实时更新的地图信息,更准确地规划救援路径,避免无效移动,从而大幅提高救援速度。;
23、3、本发明的生态系统协同工作,实现了各组件之间的高效配合,水上救援机器人、无人机、停靠补给站以及云端数据中心之间通过无线网络连接,形成一个紧密协作的整体;无人机负责环境扫描与地图构建,救援机器人则根据地图信息进行救援行动;停靠补给站为无人机提供必要的补给与支持,而云端数据中心则负责数据处理与远程监控。这种协同工作的模式使得救援行动更加高效、有序;
24、4、本发明的高度自动化与智能化特点显著;无人机与救援机器人均具备较高的自动化水平,能够自主完成飞行任务、地图构建、路径规划等,这不仅减少了人工干预,降低了操作难度,还提高了救援效率,同时,智能化技术的应用也使得救援行动更加精准、可靠;
25、5、本发明通过无人机的高空视野和快速移动能力,能够迅速发现被困人员。无人机装备有高精度环境感知设备,如高清摄像头、激光雷达等,可以实时捕捉救援区域的情况,一旦发现被困人员,无人机可以立即将相关信息传输给救援机器人,为救援行动提供精确的导航和定位信息;
26、6、本发明通过无人机实时更新地图信息,使救援机器人能够根据最新地图信息自动调整救援路径与策略,这种动态调整的能力使得救援行动能够迅速适应环境变化,避免潜在的危险和障碍;同时,无人机还可以为救援机器人提供即时环境信息,辅助其快速定位并接近救援目标,从而进一步提高救援效率;
27、7、本发明通过空地协同的工作模式,显著提升了救援行动的整体效能,无人机与救援机器人之间形成了紧密的配合关系,相互补充、相互支持,无人机负责高空监测与地图构建,为救援机器人提供宏观的视野和精准的定位;而救援机器人则负责具体的救援操作,将被困人员从危险中解救出来,这种空地协同的工作模式不仅提高了救援速度,还增强了救援的安全性;
28、8、本发明的提出为复杂环境下的紧急救援提供了一种全新的解决方案,有效克服了传统救援方式在效率、安全性以及适应性方面的局限,展现出极高的实用价值与社会意义。
- 还没有人留言评论。精彩留言会获得点赞!