一种无人机动态风扰抑制方法
本发明涉及功率控制,具体涉及一种无人机动态风扰抑制方法。
背景技术:
1、在无人机飞行过程中,环境风速是影响飞行稳定性和精确性的关键因素。当无人机遭遇不同强度和方向的风扰时,会产生显著的速度偏差。传统的风扰抑制方法主要依赖于简单的线性补偿算法或基于经验的调整策略,这些方法往往难以实时、精确地响应复杂多变的风环境。现有技术通常采用固定增益的反馈控制或简单的前馈补偿,这种方法在面对突发性风扰或快速变化的风场时,无法有效地动态调整无人机的飞行参数。这些技术的主要局限性在于:缺乏对风场动态特性的实时感知能力,无法准确预测风对无人机速度瞬时影响,导致无人机在复杂气象条件下的飞行精度显著下降。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种无人机动态风扰抑制方法解决了无人机在复杂气象条件下的飞行精度低的问题。
2、为了达到上述发明目的,本发明采用的技术方案为:一种无人机动态风扰抑制方法,包括以下步骤:
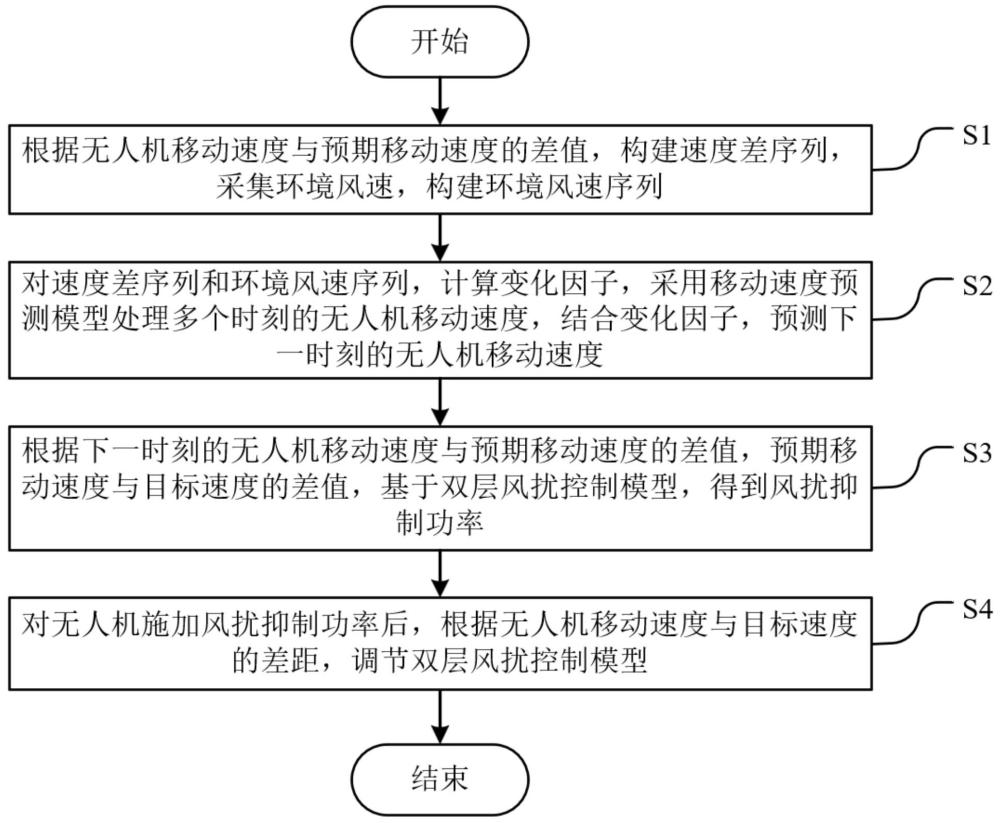
3、s1、根据无人机移动速度与预期移动速度的差值,构建速度差序列,采集环境风速,构建环境风速序列;
4、s2、对速度差序列和环境风速序列,计算变化因子,采用移动速度预测模型处理多个时刻的无人机移动速度,结合变化因子,预测下一时刻的无人机移动速度;
5、s3、根据下一时刻的无人机移动速度与预期移动速度的差值,预期移动速度与目标速度的差值,基于双层风扰控制模型,得到风扰抑制功率;
6、s4、对无人机施加风扰抑制功率后,根据无人机移动速度与目标速度的差距,调节双层风扰控制模型。
7、进一步地,s2包括以下分步骤:
8、s21、对速度差序列,计算速度差变化因子,其中,速度差序列为sd={st,…,st-τ,…,st-t},其中,sd为速度差序列,st为第t时刻的速度差,st-τ为第t-τ时刻的速度差,st-t为第t-t时刻的速度差,t为当前时刻,τ为历史时刻,t为历史时刻的长度;
9、s22、对环境风速序列,计算风速变化因子,其中,环境风速序列es={vw,t,…,vw,t-τ,…,vw,t-t},其中,es为环境风速序列,vw,t为第t时刻的环境风速,vw,t为第t-τ时刻的环境风速,vw,t-t为第t-t时刻的环境风速;
10、s23、采用移动速度预测模型处理多个时刻的无人机移动速度,结合速度差变化因子和风速变化因子,预测下一时刻的无人机移动速度。
11、进一步地,s21计算速度差变化因子的公式为:,其中,εsd为速度差变化因子,sc为速度差序列的元素均值,| |为绝对值运算;
12、s22中计算风速变化因子的公式为:,其中,εes为风速变化因子,vw,c为环境风速序列的元素均值。
13、进一步地,移动速度预测模型包括:lstm层、速度特征提取单元、速度特征融合单元、风速特征融合单元和预测层;
14、lstm层的输入端用于输入多个时刻的无人机移动速度,其输出端与速度特征提取单元的输入端连接;速度特征提取单元的输出端分别与速度特征融合单元的第一输入端和风速特征融合单元的第一输入端连接;速度特征融合单元的第二输入端用于输入速度差变化因子;风速特征融合单元的第二输入端用于输入风速变化因子;预测层的输入端分别与速度特征融合单元的输出端和风速特征融合单元的输出端连接,其输出端作为移动速度预测模型的输出端。
15、进一步地,lstm层的一个cell单元输入一个时刻的无人机移动速度;
16、速度特征提取单元的表达式为:,其中,h为速度特征值,hi为lstm层输出的第i个特征,ωi为hi的权重项,bi为hi的偏置项,n为lstm层输出特征的数量,i为正整数;
17、速度特征融合单元的表达式为:,其中,ysd为速度特征融合值,ω1,h为h的第一权重项,b1,h为h的第一偏置项,εsd为速度差变化因子,ωεsd为εsd的权重项,bεsd为εsd的偏置项,f为激活函数;
18、风速特征融合单元的表达式为:,其中,yes为风速特征融合值,ω2,h为h的第二权重项,b2,h为h的第二偏置项,εes为风速变化因子,ωεes为εes的权重项,bεes为εes的偏置项。
19、进一步地,预测层的表达式为:,,其中,yt+1为第t+1时刻的无人机移动速度,ysd为速度特征融合值,yes为风速特征融合值,ωysd为ysd的权重项,ωyes为yes的权重项,by为预测层中偏置项,g为移动速度特征值,tanh为双曲正切函数,ln为对数函数,e为自然常数。
20、进一步地,s4中双层风扰控制模型包括:第一差值计算单元、第二差值计算单元、第一反馈控制单元、第二反馈控制单元、加法单元和功率调节单元;
21、第一差值计算单元用于计算下一时刻的无人机移动速度和下一时刻的预期移动速度的差值,得到第一差值;第二差值计算单元用于计算当前时刻的预期移动速度与目标速度的差值,得到第二差值;第一反馈控制单元用于输入第一差值,得到第一功率分量;第二反馈控制单元用于输入第二差值,得到第二功率分量;加法单元用于将第一功率分量和第二功率分量相加,得到初始功率;功率调节单元用于对初始功率进行调节处理,得到风扰抑制功率,其中,第一反馈控制单元和第二反馈控制单元为pid模型。
22、进一步地,功率调节单元的表达式为:,其中,pw为风扰抑制功率,po为初始功率,μ为调节系数。
23、进一步地,s4包括以下分步骤:
24、s41、在对无人机施加风扰抑制功率后,采集无人机移动速度,计算速度变化值:vb=vt-vt-r,vb为速度变化值,vt为第t时刻的无人机移动速度,vt-r为第t-r时刻的无人机移动速度,t为当前时刻,r为选择的时间长度;
25、s42、计算第t-r时刻的无人机移动速度与目标速度的差值,得到目标速度差值;
26、s43、根据速度变化值和目标速度差值,计算调节速度:θ=|vb|/|dtar|,其中,θ为调节速度,| |为绝对值运算,dtar为目标速度差值;
27、s44、在调节速度大于等于0.7时,双层风扰控制模型中调节系数设置为0;
28、s45、在调节速度小于0.7时,根据无人机移动速度与目标速度的差值,计算双层风扰控制模型中调节系数。
29、进一步地,s45中计算调节系数的公式为:,其中,μ为调节系数,vt为第t时刻的无人机移动速度,vtar为目标速度,vd为速度差阈值,| |为绝对值运算。
30、本发明的有益效果为:本发明根据速度差序列和环境风速序列,计算变化因子,能够感知环境风速的变化和对速度影响的变化。采用移动速度预测模型,结合变化因子的调节,能够准确预测下一时刻无人机的移动速度,从而精准估计风对速度的瞬时影响。
31、本发明基于下一时刻的速度差和预期速度的差值,预期速度与目标速度的差值,采用双层风扰控制模型,能够更精准地计算出所需的风扰抑制功率。本发明在应用风扰抑制功率后,通过持续监测无人机移动速度与目标速度的差距,可以调节双层风扰控制模型,实现无人机移动速度快速逼近目标速度,提高无人机在复杂气象条件下的飞行精度。
- 还没有人留言评论。精彩留言会获得点赞!