一种大规模无人机集群运动仿真方法及系统与流程
本发明涉及运动仿真的,尤其涉及一种大规模无人机集群运动仿真方法及系统。
背景技术:
1、在大规模无人机集群的协同规划仿真中,集群的运动仿真是核心环节之一。大多数集群行为涉及复杂的运动规划,通常包括为每架无人机生成运动轨迹、期望速度以及到达轨迹终点时的速度。运动轨迹通常由若干稀疏的航路点及航向组成,无人机在仿真过程中依据运动规划结果进行运动模拟。
2、现有的单架无人机运动仿真方法通常包含飞控和飞行动力学模块。飞控模块基于飞机当前状态和运动规划结果,结合无人机的速度、高度及性能限制进行路径规划,生成平滑的曲线路径,并在飞行过程中根据实时状态数据输出推力和舵面控制信号。飞行动力学模块接收控制信号,并在飞机模型中计算实时位置和姿态。
3、上述方法在运算上负担较重,单个cpu最多只能模拟数十架无人机。当需要处理上千架无人机的大规模集群时,现有方法难以保证仿真的运行效率,通常需要依赖分布式计算集群来解决。因此,其支持的无人机数量受限于分布式环境中的计算资源,无法在单台计算机上高效模拟大规模无人机集群。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种大规模无人机集群运动仿真方法及系统,是一种基于虚幻引擎mass框架的面向大规模无人机集群的协同规划仿真技术,特别是针对集群运动仿真的高效技术。本发明能够在单台计算机上高效模拟上千架无人机的运动,克服现有技术中对分布式计算资源的依赖。
2、本发明的上述发明目的是通过以下技术方案得以实现的:
3、一种大规模无人机集群运动仿真方法,包括以下步骤:
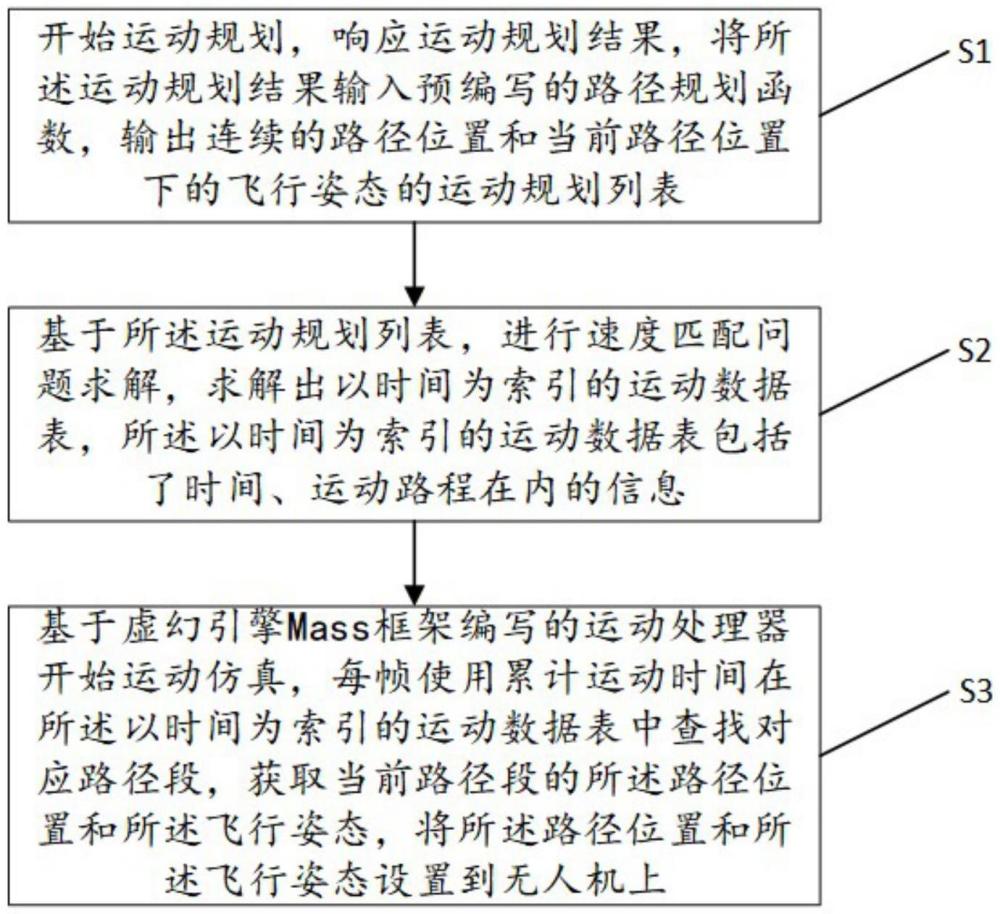
4、s1:开始运动规划,响应运动规划结果,将所述运动规划结果输入预编写的路径规划函数,输出连续的路径位置和当前路径位置下的飞行姿态的运动规划列表;
5、s2:基于所述运动规划列表,进行速度匹配问题求解,求解出以时间为索引的运动数据表,所述以时间为索引的运动数据表包括了时间、运动路程在内的信息;
6、s3:基于虚幻引擎mass框架编写的运动处理器开始运动仿真,每帧使用累计运动时间在所述以时间为索引的运动数据表中查找对应路径段,获取当前路径段的所述路径位置和所述飞行姿态,将所述路径位置和所述飞行姿态设置到无人机上。
7、进一步地,在步骤s1中,开始运动规划,响应运动规划结果,将所述运动规划结果输入预编写的路径规划函数,输出连续的路径位置和当前路径位置下的飞行姿态的运动规划列表,具体为:
8、对无人机集群中每一个无人机进行所述运动规划,输出包括稀疏运动轨迹、期望速度、终点速度在内的所述运动规划结果;
9、将所述运动规划结果输入预先编写的所述路径规划函数中,输出连续的指定的所述路径采样间隔的所述路径位置和当前路径位置下的所述飞行姿态的所述运动规划列表作为最终路径。
10、进一步地,所述路径规划函数,具体为:
11、所述路径规划函数使用matlab无人机工具箱中的路径规划模块,编写3d-dubins路径规划函数,并最终将所述3d-dubins路径规划函数导出为c语言动态库,并集成到虚幻引擎mass框架中;
12、其中,所述3d-dubins路径规划函数在进行路径规划时通过包括直线段、左转、右转在内的基础运动模型进行组合,并考虑无人机的最小转弯半径,确保无人机从起点到终点沿最短路径飞行,同时满足无人机的动力学和操控性约束,生成所述最终路径。
13、进一步地,在步骤s2中,基于所述运动规划列表,进行所述速度匹配问题求解,求解出所述以时间为索引的运动数据表,具体为:
14、构建包括所述以时间为索引的运动数据表tbmdt、以运动路程为索引的运动数据表dbmdt、以运动状态转换时的路程为索引的运动数据表tdbmdt在内的三种类型的运动数据表;
15、基于所述虚幻引擎mass框架编写的路径生成处理器执行以下操作:
16、在所述以运动路程为索引的运动数据表dbmdt中插入所述运动规划列表中路径点的运动数据,初始数据包含所述路径位置、所述飞行姿态和路程;
17、调用运动数据表计算函数,基于所述速度匹配问题求解计算路径段的运动状态转换点,生成所述以运动状态转换时的路程为索引的运动数据表tdbm dt,并基于所述以运动路程为索引的运动数据表dbmdt和所述以运动状态转换时的路程为索引的运动数据表tdbmdt,最终合并插值生成所述以时间为索引的运动数据表tbmdt。
18、进一步地,调用所述运动数据表计算函数,基于所述速度匹配问题求解计算路径段的运动状态转换点,生成所述以运动状态转换时的路程为索引的运动数据表tdbmdt,并基于所述以运动路程为索引的运动数据表dbmdt和所述以运动状态转换时的路程为索引的运动数据表tdbmdt,最终合并插值生成所述以时间为索引的运动数据表tbmdt,具体为:
19、进行所述速度匹配问题求解,基于当前速度、加速度、减速度、路径期望速度和到达路径终点时的速度,计算路径段的运动状态转换点,生成所述以运动状态转换时的路程为索引的运动数据表tdbmdt,此时运动数据包含运动状态、速度、时间和路程,若路径过短,无法在路径终点调整为目标的所述到达路径终点时的速度时,则计算无人机到达路径终点后持续加速和减速,逼近目标的所述到达路径终点时的速度后的路程点,作为所述以运动状态转换时的路程为索引的运动数据表tdbmdt中最终运动状态转换点;
20、遍历所述以运动路程为索引的运动数据表dbmdt,根据路程在所述以运动状态转换时的路程为索引的运动数据表tdbmdt中查找路径段,计算运动数据中缺失的运动状态、时间和速度,并插入到所述以时间为索引的运动数据表tbmdt;
21、遍历所述以运动状态转换时的路程为索引的运动数据表tdbmdt,根据路程在所述以运动路程为索引的运动数据表dbmdt中查找路径段,计算运动数据中缺失的所述路径位置和所述飞行姿态,并插入到所述以时间为索引的运动数据表tbmdt;
22、最终,所述以时间为索引的运动数据表tbmdt存储了全部路径段及运动状态转换点的运动数据。
23、进一步地,在步骤s3中,基于虚幻引擎mass框架编写的运动处理器开始运动仿真,每帧使用累计运动时间在所述以时间为索引的运动数据表中查找对应路径段,获取当前路径段的所述路径位置和所述飞行姿态,将所述路径位置和所述飞行姿态设置到无人机上,具体为:
24、基于所述虚幻引擎mass框架编写的运动处理器执行以下操作:
25、每帧使用所述累计运动时间在所述以时间为索引的运动数据表tbmdt中查找相应的时间段;
26、若所述累计运动时间大于所述以时间为索引的运动数据表tbmdt中的最大时间,没有查找到对应路程段,则无人机按照当前速度和所述飞行姿态进行匀速运动;
27、若查找到对应路程段,则根据当前路程段的运动状态计算无人机在当前路径段上的相对路程,并根据所述相对路程和路径段总路程,计算插值因子;
28、根据所述插值因子,插值得到路径段上的插值运动位置和插值运动姿态,最终根据插值结果设置无人机的所述路径位置和所述飞行姿态。
29、进一步地,最终根据插值结果设置无人机的所述路径位置和所述飞行姿态,具体为:
30、无人机的所述路径位置设置为所述插值运动位置;
31、无人机的姿态航向角设为所述插值运动姿态中的航向角;
32、无人机的姿态俯仰角以所述插值运动姿态中的俯仰角为目标值,通过无人机设定的俯仰角度变化率逼近;
33、无人机的姿态滚转角不使用所述插值运动姿态的计算结果,基于无人机设定的航向角变化率,计算滚转角目标值,并通过无人机设定的滚转角度变化率逼近。
34、一种用于执行如上述的大规模无人机集群运动仿真方法的大规模无人机集群运动仿真系统,包括:
35、运动路径规划模块,用于开始运动规划,响应运动规划结果,将所述运动规划结果输入预编写的路径规划函数,输出连续的路径位置和当前路径位置下的飞行姿态的运动规划列表;
36、运动数据表计算模块,用于基于所述运动规划列表,进行速度匹配问题求解,求解出以时间为索引的运动数据表,所述以时间为索引的运动数据表包括了时间、运动路程在内的信息;
37、开始运动仿真模块,用于基于虚幻引擎mass框架编写的运动处理器开始运动仿真,每帧使用累计运动时间在所述以时间为索引的运动数据表中查找对应路径段,获取当前路径段的所述路径位置和所述飞行姿态,将所述路径位置和所述飞行姿态设置到无人机上。
38、一种计算机设备,包括存储器和一个或多个处理器,所述存储器中存储有计算机代码,所述计算机代码被所述一个或多个处理器执行时,使得所述一个或多个处理器执行如上述的方法。
39、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机代码,当所述计算机代码被执行时,如上述的方法被执行。
40、与现有技术相比,本发明包括以下至少一种有益效果是:
41、(1)通过提供一种大规模无人机集群运动仿真方法,凭借精准的路径规划与高效数据处理,在单台计算机上达成对大规模无人机集群的精准且快速的仿真,极大提升了仿真的准确性与效率。依托虚幻引擎mass框架,既适应多种复杂场景,又具备良好扩展性,无论是拓展仿真规模还是丰富功能都游刃有余。同时,高效利用硬件资源并降低技术门槛,减少了硬件成本投入与开发难度,有力推动无人机集群仿真技术在更多领域的应用与发展,为相关研究、开发及测试工作开辟了广阔且便捷的途径。
42、(2)高效性:通过优化的3d-dubi ns路径规划算法以及专门设计的虚幻引擎mass框架中编写的路径生成处理器umassmovementpathgenerateproces so和运动处理器umassmovementhandleprocessor,能够在短时间内为上千架无人机生成精准且合理的飞行路径,并高效地处理运动数据。umassmovementpathgenerateprocessor可以迅速将路径规划结果解析为不同索引的运动数据表,减少了数据转换和处理的时间开销,从而加速整个仿真流程,使得大规模无人机仿真在单台计算机上得以高效实现,显著提升了仿真效率。umassmovementhandleprocessor基于运动数据表进行插值计算无人机位置和姿态的机制,能够以较高的精度模拟无人机的实时运动状态。在大规模仿真场景中,这种精准的模拟有助于减少因近似计算导致的误差积累,确保每架无人机的运动轨迹都能符合预期,进一步提升了仿真的准确性和可靠性,间接提高了仿真效率。
43、(3)资源节约:无需借助分布式计算资源,仅依靠单台计算机即可完成上千架固定翼无人机的仿真任务,避免了购置大量分布式计算节点所需的高昂硬件成本。例如,无需构建复杂的集群服务器架构,减少了对高性能网络设备、大量服务器主机以及相关存储设备的需求,从而显著降低了整体硬件投入。不依赖分布式系统意味着无需处理分布式计算中的诸多复杂问题,如节点间的通信同步、数据一致性维护、任务分配与协调等。这大大简化了整个仿真系统的架构和软件设计的复杂性,减少了开发、调试以及后期维护的工作量和难度,降低了因系统复杂性带来的潜在风险和成本。
44、(4)可扩展性:采用实体组件系统(ecs)架构,将无人机的各种属性和行为抽象为独立的组件,并通过系统来处理具有特定组件的实体集合。这种解耦的设计使得在面对更大规模、更复杂的集群仿真需求时,能够方便地添加新的实体类型(如不同型号或功能的无人机)、组件(如新型传感器组件或武器系统组件)以及系统(如针对新场景的路径规划系统或环境交互系统),而不会对现有架构造成大规模的改动,从而为系统的持续扩展提供了坚实的基础。运动数据表(mdt)的多种类型设计以及相关的数据处理算法,能够很好地适应不同规模的仿真需求。无论是少量无人机还是大规模集群,都可以通过灵活调整数据索引和处理方式来优化性能。例如,随着无人机数量的增加,tdbmdt能够有效地管理运动状态转换时的路程数据,便于在大规模场景中对无人机运动状态的精准控制和分析,进一步体现了系统在数据层面的可扩展性,使其能够应对日益增长的仿真规模和复杂度挑战。
- 还没有人留言评论。精彩留言会获得点赞!