基于自适应多项式逼近的高速列车协同控制方法及系统
本发明属于高速列车编队控制,尤其涉及一种基于自适应多项式逼近的高速列车协同控制方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、列车编队是指由多列列车按照一定的顺序、间距和协同规则组成的列车群组。这些列车在运行过程中相互协作,就像一个整体一样,实现诸如同步行驶、协同制动、联合调度等功能。
3、现有的自动化的列车编队协同控制方案包括基于固定规则的控制方案和信号系统引导的控制方案,其中,基于固定规则的控制方案通常采用固定间距来维持列车编队的秩序、根据列车的不同类型(如客运列车、货运列车)或者运行速度范围,设定不同的间距等级、列车编队中的后车通常按照一定的速度差跟随前车或根据线路条件(如弯道、坡道、桥梁等)和列车类型,设定整个列车编队的最高限速等策略,此种方式由于采用固定的规则导致灵活性较差无法应对各种紧急情况;而基于信号系统引导的控制方案,通过在轨道上划分不同的电路区间,利用列车车轮对轨道电路的短路效应来检测列车的位置,并将位置信息传递给后续列车,但是,此种方式信息传输能力有限,只能提供简单的位置和速度指令信息,而且,轨道电路容易受到外界因素(如潮湿环境、金属异物等)的干扰,导致信号错误或丢失,另外,此种方式的更新和维护成本较高,随着铁路运输的发展,其对复杂列车编队协同控制的支持能力逐渐不足。
技术实现思路
1、本发明提供了一种基于自适应多项式逼近的高速列车协同控制方法及系统,以应对高速列车编队协同运行过程中的不确定性,使高速列车编队在保持安全距离的前提下,后续列车能够有序跟踪前车,且整个编队的实际速度和位移能够精确跟踪预设目标,同时确保系统在动态运行过程中保持稳定。
2、根据本发明实施例的第一个方面,提供了一种基于自适应多项式逼近的高速列车协同控制方法,包括:
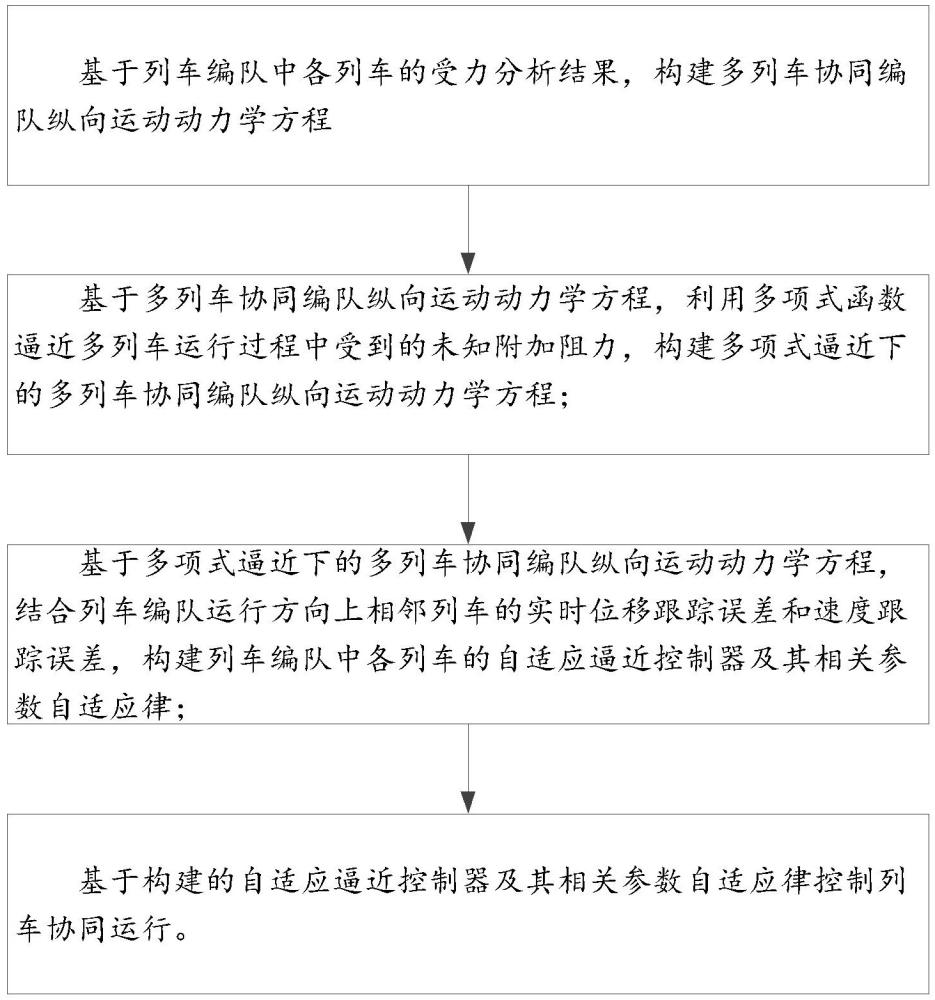
3、基于列车编队中各列车的受力分析结果,构建多列车协同编队纵向运动动力学方程;
4、基于多列车协同编队纵向运动动力学方程,利用多项式函数逼近多列车运行过程中受到的未知附加阻力,构建多项式逼近下的多列车协同编队纵向运动动力学方程;
5、基于多项式逼近下的多列车协同编队纵向运动动力学方程,结合列车编队运行方向上相邻列车的实时位移跟踪误差和速度跟踪误差,构建列车编队中各列车的自适应逼近控制器及其相关参数自适应律;
6、基于构建的自适应逼近控制器及其相关参数自适应律控制列车协同运行。
7、进一步的,所述多列车协同编队纵向运动动力学方程采用单质点模型进行构建,其中,列车的阻力划分为基本运行阻力和附加阻力;所述动力学方程具体表示如下:
8、
9、其中,,t,是多列车协同运行总时间,、和分别代表多列车协同编队运行方向上第i辆列车实时的位移、速度和加速度;代表多列车协同编队运行方向上第i辆列车的总重量;代表多列车协同编队运行方向上第i辆列车的控制输入;代表与列车速度相关的多列车协同编队运行方向上第i辆列车基本运行阻力,代表多列车协同编队运行方向上第i辆列车在固定线路上受到的附加阻力。
10、进一步的,所述多项式逼近下的多列车协同编队纵向运动动力学方程的构建,具体为:采用多项式函数逼近多列车协同编队运行方向上列车的附加阻力;基于多列车协同编队纵向运动动力学方程,结合基本运行阻力方程以及表示附加阻力的多项式函数,实现多项式逼近下的多列车协同编队纵向运动动力学方程的构建。
11、进一步的,所述多项式逼近下的多列车协同编队纵向运动动力学方程,具体表示如下:
12、
13、其中,,t,是多列车协同运行总时间,、和分别代表多列车协同编队运行方向上第i辆列车实时的位移、速度和加速度;代表多列车协同编队运行方向上第i辆列车的总重量;代表多列车协同编队运行方向上第i辆列车的控制输入;代表与列车速度相关的多列车协同编队运行方向上第i辆列车基本运行阻力,代表多项式系数,为任意非负实数,,为多项式维数,为多项式自变量函数;为重构误差函数。
14、进一步的,对于第一辆列车,其自适应逼近控制器,具体为:
15、
16、
17、其中,为多列车协同编队运行方向上第一辆列车的控制输入,为多列车协同编队运行方向上第一辆列车的总重量;为列车运行方向上第一辆列车的期望加速度跟踪轨迹;t代表相量的转置;为的估计值,,为第一辆列车的戴维斯系数,且其误差项满足;,分别表示第一辆列车t时刻速度的0次方、1次方、2次方;为的估计值,,代表多项式系数;且其误差项满足;,代表第一辆列车t时刻对应的多项式自变量函数的0次方、1次方以及m次方;为符号函数;,和为待选取的控制器增益;为的估计值,为重构误差的上界,和分别为列车编队协同运行方向上第一辆列车的位移跟踪误差和速度跟踪误差,和分别为列车编队协同运行方向上第一辆列车的期望位移跟踪轨迹和期望速度跟踪轨迹,和分别为列车编队协同运行方向上第一辆列车的实时的位移和速度。
18、进一步的,对于第一辆列车,其自适应逼近控制器对应的相关参数自适应律具体为:
19、;;
20、;
21、其中,为针对第一辆列车的待选的正常数;,为针对第一辆列车的待选的正定矩阵。
22、进一步的,对于后续列车,其自适应逼近控制器具体表示为:
23、
24、
25、其中,代表多列车协同编队运行方向上第i辆列车的控制输入,代表多列车协同编队运行方向上第i辆列车的总重量,为第i辆列车的期望加速度跟踪轨迹;t代表相量的转置;为的估计值,,为第i辆列车的戴维斯系数且其误差项,满足;,分别表示第i辆列车t时刻速度的0次方、1次方、2次方;为的估计值,,代表多项式系数,且其误差项满足;,代表第i辆列车t时刻对应的多项式自变量函数的0次方、1次方以及m次方;为符号函数;,和为待选取的控制器增益;为的估计值,为重构误差的上界,和分别为列车编队协同运行方向上第i辆列车的实时位移跟踪误差和速度跟踪误差,和分别为列车编队协同运行方向上第i-1辆列车的实时的位移和速度,和分别为列车编队协同运行方向上第i辆列车的实时的位移和速度,代表列车编队系统运行方向上,第i辆列车与第i-1辆列车之间的安全距离。
26、进一步的,对于后续列车,其自适应逼近控制器对应的相关参数自适应律具体为:
27、;
28、;
29、;
30、其中,为针对第i辆列车的待选的正常数;,为针对第i辆列车的待选的正定矩阵。
31、进一步的,对于获得的自适应逼近控制器及其相关参数自适应律,利用李雅普诺夫函数进行多列车协同编队运行下多列车闭环控制系统的协同稳定性验证。
32、根据本发明实施例的第二个方面,提供了一种基于自适应多项式逼近的高速列车协同控制系统,包括:
33、动力学方程构建单元,其用于基于列车编队中各列车的受力分析结果,构建多列车协同编队纵向运动动力学方程;
34、多项式逼近下的动力学方程构建单元,其用于基于多列车协同编队纵向运动动力学方程,利用多项式函数逼近多列车运行过程中受到的未知附加阻力,构建多项式逼近下的多列车协同编队纵向运动动力学方程;
35、自适应逼近控制器构建单元,其用于基于多项式逼近下的多列车协同编队纵向运动动力学方程,结合列车编队运行方向上相邻列车的实时位移跟踪误差和速度跟踪误差,构建列车编队中各列车的自适应逼近控制器及其相关参数自适应律;
36、系统控制单元,其用于基于构建的自适应逼近控制器及其相关参数自适应律控制列车协同运行。
37、与现有技术相比,本发明的有益效果是:
38、本发明所述方案提供了一种基于自适应多项式逼近的高速列车协同控制方法及系统,所述方案通过自适应控制的方法对高速列车编队进行协同控制,实现整个编队在保证安全距离的前提下稳定运行;同时,所述方案利用多项式算法逼近附加阻力,并直接进行反馈控制器设计,能够有效应对多列车协同编队运行过程中附加阻力的不确定性,确保列车的实际速度和位移能够精确跟踪预设目标。
39、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!