一种多项式模糊故障估计观测器设计方法及相关设备
本发明涉及故障诊断,具体而言,涉及一种多项式模糊故障估计观测器设计方法及相关设备。
背景技术:
1、随着工业系统的高速发展,系统的复杂性和非线性日益显著,而非线性系统的故障诊断技术则是保护生产安全的核心。故障估计作为故障诊断的核心任务之一,能够为主动容错控制提供必要的基础,并给出故障的特征和相关信息,是故障诊断领域的研究热点。
2、目前的非线性系统一般会采用t-s模糊系统进行处理,然而该模糊系统在系统非线性较为复杂时,由于模糊规则数较多,以致出现维度爆炸的问题,同时可能遭受执行器故障和传感器故障,从而导致前件变量不可测,而现有的处理方法往往是以前件变量可测作为假设前提进行故障估计,因此无法很好地适用于同时遭受执行器故障和传感器故障的非线性系统。
3、针对上述问题,目前尚未有有效的技术解决方案。
技术实现思路
1、本发明的目的在于提供一种多项式模糊故障估计观测器设计方法及相关设备,完善了针对同时遭受执行器故障和传感器故障的非线性系统的故障诊断技术,在前件变量不可测的情况下实现故障诊断,无需原系统状态收敛,适用范围更宽广且更有利于适应复杂多变的任务需求。
2、第一方面,本发明提供了一种多项式模糊故障估计观测器设计方法,应用于同时存在执行器故障和传感器故障的非线性不确定系统,包括以下步骤:
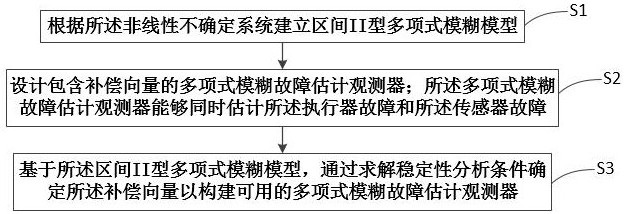
3、s1.根据所述非线性不确定系统建立区间ii型多项式模糊模型;
4、s2.设计包含补偿向量的多项式模糊故障估计观测器;所述多项式模糊故障估计观测器能够同时估计所述执行器故障和所述传感器故障;
5、s3.基于所述区间ii型多项式模糊模型,通过求解稳定性分析条件确定所述补偿向量以构建可用的多项式模糊故障估计观测器。
6、本发明提供的多项式模糊故障估计观测器设计方法利用补偿向量对不可测的前件变量造成的影响进行补偿,满足更广泛和更复杂多变的任务需求,有效适用于同时遭受执行器故障和传感器故障的非线性系统。
7、进一步的,步骤s1中的具体步骤包括:
8、s11.对所述非线性不确定系统进行建模并给出模糊规则;
9、s12.根据所述模糊规则得到所述区间ii型多项式模糊模型。
10、进一步的,所述区间ii型多项式模糊模型的表达式为:
11、;
12、其中,为的导数,指代,为的转置矩阵,为的转置矩阵,为系统状态向量,为的转置矩阵,为所述区间ii型多项式模糊模型的第个模糊规则,,为所述区间ii型多项式模糊模型的模糊规则数,为所述区间ii型多项式模糊模型第个模糊规则归一化后的关于z的第一隶属度函数,指代,为所述区间ii型多项式模糊模型第个模糊规则关于的第一系统矩阵,指代,为所述区间ii型多项式模糊模型第个模糊规则关于的第一输入矩阵,为控制输入,指代所述执行器故障,指代,为所述区间ii型多项式模糊模型第个模糊规则关于的外界干扰的第二输入矩阵,为单位矩阵,指代,为外界干扰,为的导数,为指代所述传感器故障,为系统输出,指代,为第一输出矩阵,为第二输出矩阵。
13、进一步的,所述多项式模糊故障估计观测器的表达式为:
14、;
15、其中,为的导数,指代,为的转置矩阵,为的转置矩阵,为的估计值,为的转置矩阵,为的估计值,为所述多项式模糊故障估计观测器的第个模糊规则,,为所述多项式模糊故障估计观测器的模糊规则数,为所述多项式模糊故障估计观测器第个模糊规则归一化后的关于的第二隶属度函数,为所述多项式模糊故障估计观测器第个模糊规则关于的第二系统矩阵,为所述多项式模糊故障估计观测器第个模糊规则关于的第三输入矩阵,为的估计值,为所述多项式模糊故障估计观测器第个模糊规则关于的第一增益矩阵,为估计值,为补偿向量,为所述多项式模糊故障估计观测器的第个模糊规则,,为所述多项式模糊故障估计观测器第个模糊规则归一化后的关于的第二隶属度函数,为所述多项式模糊故障估计观测器第个模糊规则关于的第二增益矩阵,为的导数,为的导数,为所述多项式模糊故障估计观测器关于的第三增益矩阵。
16、进一步的,步骤s3中的具体步骤包括:
17、s31.基于所述区间ii型多项式模糊模型和所述多项式模糊故障估计观测器给定稳定性分析条件;
18、s32.求解满足所述稳定性分析条件的常值矩阵和变量;
19、s33.根据所述常值矩阵和所述变量得到所述补偿向量。
20、进一步的,所述常值矩阵包括第一常值矩阵;所述变量包括第一变量、第二变量、第三变量和第四变量;
21、步骤s33中的具体步骤包括:
22、s331.根据以下公式计算所述补偿向量:
23、;
24、;
25、;
26、;
27、其中,为所述补偿向量,为的范数,指代=,为第一预设小量,、和均指代所述补偿向量的分量,指代,为第一最大奇异值,为的奇异值,指代,指代,为所述区间ii型多项式模糊模型第个模糊规则关于的第一系统矩阵,为所述区间ii型多项式模糊模型的第个模糊规则,,指代,为所述第一变量,为的逆矩阵,为所述第一常值矩阵,指代,为所述第三变量,为的转置矩阵,为的转置矩阵,指代,为所述第二变量,指代,为所述第四变量,指代,为第二最大奇异值,为的奇异值,指代,指代,为所述区间ii型多项式模糊模型第个模糊规则关于的第一输入矩阵,为的转置矩阵。
28、第二方面,本发明提供了一种多项式模糊故障估计观测器设计装置,应用于同时存在执行器故障和传感器故障的非线性不确定系统,包括:
29、建立模块,根据所述非线性不确定系统建立区间ii型多项式模糊模型;
30、设计模块,用于设计包含补偿向量的多项式模糊故障估计观测器;所述多项式模糊故障估计观测器能够同时估计所述执行器故障和所述传感器故障;
31、求解模块,用于基于所述区间ii型多项式模糊模型,通过求解稳定性分析条件确定所述补偿向量以构建可用的多项式模糊故障估计观测器。
32、本发明提供的多项式模糊故障估计观测器设计装置在前件变量不可测的情况下实现故障诊断,满足更广泛和更复杂多变的任务需求,有效适用于同时遭受执行器故障和传感器故障的非线性系统。
33、进一步的,建立模块在用于根据所述非线性不确定系统建立区间ii型多项式模糊模型的时候执行:
34、s11.对所述非线性不确定系统进行建模并给出模糊规则;
35、s12.根据所述模糊规则得到所述区间ii型多项式模糊模型。
36、第三方面,本发明提供一种电子设备,包括处理器以及存储器,所述存储器存储有计算机可读取指令,当所述计算机可读取指令由所述处理器执行时,运行如上述第一方面提供的所述多项式模糊故障估计观测器设计方法中的步骤。
37、第四方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时运行如上述第一方面提供的所述多项式模糊故障估计观测器设计方法中的步骤。
38、由上可知,本发明提供的多项式模糊故障估计观测器设计方法通过在观测器中引入补偿向量对不可测的前件变量造成的影响进行补偿,无需原系统状态收敛且无需要求前件变量造成的影响满足线性增长条件,扩大了适用范围,更好地很适用于同时遭受执行器故障和传感器故障的非线性系统,更有利于适应复杂多变的任务需求。
39、本发明的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明实施例了解。本发明的目的和其他优点可通过在所写的说明书、以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!