一种机器人导航避障方法及装置
本发明涉及机器人避障,具体是一种机器人导航避障方法及装置。
背景技术:
1、随机智能技术的发展,机器人逐渐进入了人们的生产生活,用于完成某些工作;在很多场合,机器人都非常常见。
2、机器人有一项基础功能就是避障功能,现有的避障功能由内置于机器人的避障模块实现,避障模块需要实时激活,消耗的资源很多,在能源有限的条件下,避障模块消耗较多资源,会影响机器人的正常工作;如何减少避障模块的资源消耗是本发明技术方案想要解决的技术问题。
技术实现思路
1、本发明的目的在于提供一种机器人导航避障方法及装置,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种机器人导航避障方法,所述方法包括:
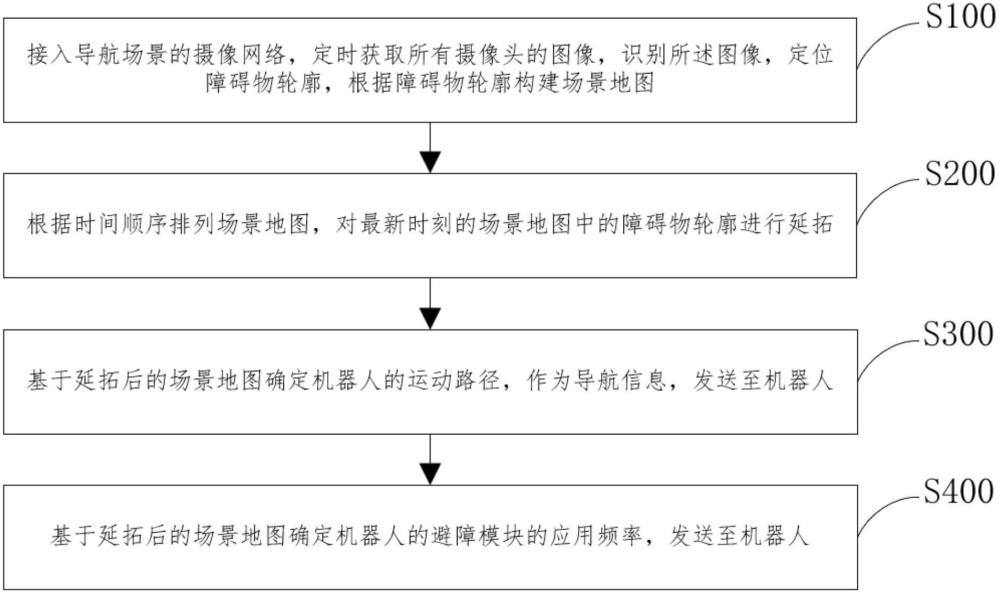
4、接入导航场景的摄像网络,定时获取所有摄像头的图像,识别所述图像,定位障碍物轮廓,根据障碍物轮廓构建场景地图;所述场景地图含有时间标签,场景地图的时间标签是获取到的图像的时间标签的均值;
5、根据时间顺序排列场景地图,对最新时刻的场景地图中的障碍物轮廓进行延拓;延拓过程为轮廓扩大过程,轮廓扩大的方向和程度由障碍物轮廓的变化情况确定;
6、基于延拓后的场景地图确定机器人的运动路径,作为导航信息,发送至机器人;
7、基于延拓后的场景地图确定机器人的避障模块的应用频率,发送至机器人;
8、机器人接收到导航信息和应用频率后,基于导航信息控制运动过程,基于应用频率控制避障模块。
9、作为本发明进一步的方案:所述接入导航场景的摄像网络,定时获取所有摄像头的图像,识别所述图像,定位障碍物轮廓,根据障碍物轮廓构建场景地图的步骤包括:
10、接入导航场景的摄像网络,定时获取所有摄像头的图像;所述摄像头在发送图像时,记录图像的拍摄位置及拍摄方向;
11、读取导航场景的场景轮廓,构建平面图;
12、根据拍摄位置及拍摄方向确定图像在平面图中的映射区域;
13、对每个图像进行识别,定位障碍物轮廓,将障碍物轮廓插入映射区域中;
14、每个图像均进行识别后,将含有障碍物轮廓的平面图作为场景地图。
15、作为本发明进一步的方案:所述根据时间顺序排列场景地图,对最新时刻的场景地图中的障碍物轮廓进行延拓的步骤包括:
16、读取场景地图中的时间标签,根据时间标签确定时间顺序;
17、基于所述时间顺序排列场景地图;
18、读取最新时刻的场景地图,对其中的任一障碍物轮廓,在之前时刻的场景地图中定位同一障碍物轮廓;
19、根据定位到的同一障碍物轮廓确定变化情况;
20、根据所述变化情况对最新时刻的场景地图中的障碍物轮廓进行延拓;
21、其中,之前时刻的场景地图的数量包括:
22、;式中,表示场景地图的数量,为基于所述时间顺序排列场景地图后,逆序顺序上的第个图像的面积,为基于所述时间顺序排列场景地图后,逆序顺序上的第个图像的面积;为预设的阈值;为预设的最低数量;
23、变化情况的确定过程为:
24、在获取到的场景地图中,选取最早时刻的场景地图和最新时刻的场景地图;
25、在最早时刻的场景地图和最新时刻的场景地图确定同一障碍物轮廓的形心,连接形心,得到变化向量;变化向量的模长是形心的距离,变化向量的方向是前一时刻的形心指向后一时刻的形心;
26、基于变化向量确定延拓方向和延拓长度,基于延拓方向和延拓长度对障碍物轮廓进行延拓;延拓宽度采用障碍物轮廓的宽度。
27、作为本发明进一步的方案:所述基于延拓后的场景地图确定机器人的运动路径,作为导航信息,发送至机器人的步骤包括:
28、在延拓后的场景地图查询机器人的运动起点和运动终点;
29、随机生成预设数量的运动起点至运动终点的运动路径;
30、计算每一运动路径的运动难度,根据运动难度选取最终的运动路径,作为导航信息,发送至机器人;
31、所述运动难度由路径距离和路径阻力共同确定,所述路径阻力的确定过程为,读取运动路径上的地面类型,根据地面类型在预设的阻力表中查询路径阻力。
32、作为本发明进一步的方案:所述随机生成预设数量的运动起点至运动终点的运动路径的步骤包括:
33、以运动起点为圆心,预设的距离为半径,建立目标选取圆;
34、在目标选取圆中剔除障碍物轮廓对应的区域,在剔除区域后的目标选取圆的圆边上随机选取点位,作为目标点位;
35、将目标点位作为新的运动起点,选取下一目标点位;
36、循环执行直至目标选取圆包含运动终点;
37、连接运动起点、所有目标点位和运动终点,得到运动路径。
38、作为本发明进一步的方案:所述基于延拓后的场景地图确定机器人的避障模块的应用频率,发送至机器人的步骤包括:
39、计算导航信息中各个位置处与各个障碍物轮廓的最近距离;
40、在所有最近距离中选取最小值;
41、根据最小值的反比确定应用频率,发送至机器人。
42、本发明技术方案还提供了一种机器人导航避障装置,所述装置包括:
43、场景地图构建模块,用于接入导航场景的摄像网络,定时获取所有摄像头的图像,识别所述图像,定位障碍物轮廓,根据障碍物轮廓构建场景地图;所述场景地图含有时间标签,场景地图的时间标签是获取到的图像的时间标签的均值;
44、轮廓延拓模块,用于根据时间顺序排列场景地图,对最新时刻的场景地图中的障碍物轮廓进行延拓;延拓过程为轮廓扩大过程,轮廓扩大的方向和程度由障碍物轮廓的变化情况确定;
45、导航信息发送模块,用于基于延拓后的场景地图确定机器人的运动路径,作为导航信息,发送至机器人;
46、应用频率发送模块,用于基于延拓后的场景地图确定机器人的避障模块的应用频率,发送至机器人;
47、机器人接收到导航信息和应用频率后,基于导航信息控制运动过程,基于应用频率控制避障模块。
48、作为本发明进一步的方案:所述场景地图构建模块包括:
49、图像获取单元,用于接入导航场景的摄像网络,定时获取所有摄像头的图像;所述摄像头在发送图像时,记录图像的拍摄位置及拍摄方向;
50、平面图构建单元,用于读取导航场景的场景轮廓,构建平面图;
51、区域映射单元,用于根据拍摄位置及拍摄方向确定图像在平面图中的映射区域;
52、轮廓插入单元,用于对每个图像进行识别,定位障碍物轮廓,将障碍物轮廓插入映射区域中;
53、地图输出单元,用于每个图像均进行识别后,将含有障碍物轮廓的平面图作为场景地图。
54、作为本发明进一步的方案:所述轮廓延拓模块包括:
55、顺序确定单元,用于读取场景地图中的时间标签,根据时间标签确定时间顺序;
56、地图排列单元,用于基于所述时间顺序排列场景地图;
57、轮廓定位单元,用于读取最新时刻的场景地图,对其中的任一障碍物轮廓,在之前时刻的场景地图中定位同一障碍物轮廓;
58、变化情况确定单元,用于根据定位到的同一障碍物轮廓确定变化情况;
59、延拓执行单元,用于根据所述变化情况对最新时刻的场景地图中的障碍物轮廓进行延拓;
60、其中,之前时刻的场景地图的数量包括:
61、;式中,表示场景地图的数量,为基于所述时间顺序排列场景地图后,逆序顺序上的第个图像的面积,为基于所述时间顺序排列场景地图后,逆序顺序上的第个图像的面积;为预设的阈值;为预设的最低数量;
62、变化情况的确定过程为:
63、在获取到的场景地图中,选取最早时刻的场景地图和最新时刻的场景地图;
64、在最早时刻的场景地图和最新时刻的场景地图确定同一障碍物轮廓的形心,连接形心,得到变化向量;变化向量的模长是形心的距离,变化向量的方向是前一时刻的形心指向后一时刻的形心;
65、基于变化向量确定延拓方向和延拓长度,基于延拓方向和延拓长度对障碍物轮廓进行延拓;延拓宽度采用障碍物轮廓的宽度。
66、作为本发明进一步的方案:所述导航信息发送模块包括:
67、起终点查询单元,用于在延拓后的场景地图查询机器人的运动起点和运动终点;
68、路径生成单元,用于随机生成预设数量的运动起点至运动终点的运动路径;
69、选取单元,用于计算每一运动路径的运动难度,根据运动难度选取最终的运动路径,作为导航信息,发送至机器人;
70、所述运动难度由路径距离和路径阻力共同确定,所述路径阻力的确定过程为,读取运动路径上的地面类型,根据地面类型在预设的阻力表中查询路径阻力。
71、与现有技术相比,本发明的有益效果是:本发明用于限定场景的机器人控制领域,基于摄像网络预先确定障碍物位置,根据障碍物位置确定一条大概率不会经过障碍物的导航信息,与此同时,根据确定的障碍物位置调节避障模块的应用频率,有效降低了资源消耗。
- 还没有人留言评论。精彩留言会获得点赞!