一种基于数字孪生模型的水下清淤机器人路径规划方法与流程
本发明涉及路径规划,尤其涉及一种基于数字孪生模型的水下清淤机器人路径规划方法。
背景技术:
1、水下清淤作业是维护海洋和内河航道、港口、水库等水域的重要手段,旨在清除沉积在水底的泥沙、淤泥和其他污染物,确保水道畅通、水质良好,并保护水下生态环境。近年来,数字孪生技术(digital twin)在工业自动化、智能制造等领域得到了广泛应用。数字孪生技术通过构建物理系统的虚拟模型,实现了物理世界与虚拟世界的实时交互和协同工作。将数字孪生技术应用于水下清淤机器人路径规划,可以有效解决传统方法的局限性,提升清淤作业的安全性、效率和环保性。
2、尽管传统方法通过预先绘制的水下地形图和已知的障碍物分布,结合算法及图权重方法选择最短路径来执行清淤任务,但这种方法存在诸多技术缺陷。首先,静态的地形图无法实时反映水下环境的动态变化,如水流速度、方向的变化,突发的障碍物出现,以及水下生物活动的干扰,导致机器人在实际作业中可能遇到未预见的挑战,影响作业的安全性和连续性。其次,传统的路径规划方法主要关注清淤作业时长、路径长度、关键清淤位置数量和能耗等静态指标,而未能充分考虑清淤过程中的实时环境状况,如气象条件、水流影响、水下生物活动等因素,这可能导致路径规划不够灵活,无法适应复杂的水下环境。此外,现有技术缺乏对历史任务的成功率、气象影响、水下生物活动历史数据的有效利用,无法从过去的任务中学习和改进,导致路径规划的鲁棒性和适应性较差。最后,传统方法在处理多目标优化问题时表现不足,难以同时兼顾清淤效率、能耗、时间成本和生态影响等多个目标,容易在某些方面做出妥协。因此,现有的清淤路径规划方法在应对复杂动态环境、保护生态环境、利用历史数据等方面存在明显的局限性,亟需引入更加智能和灵活的技术手段来提升清淤作业的整体性能。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种基于数字孪生模型的水下清淤机器人路径规划方法,包括:
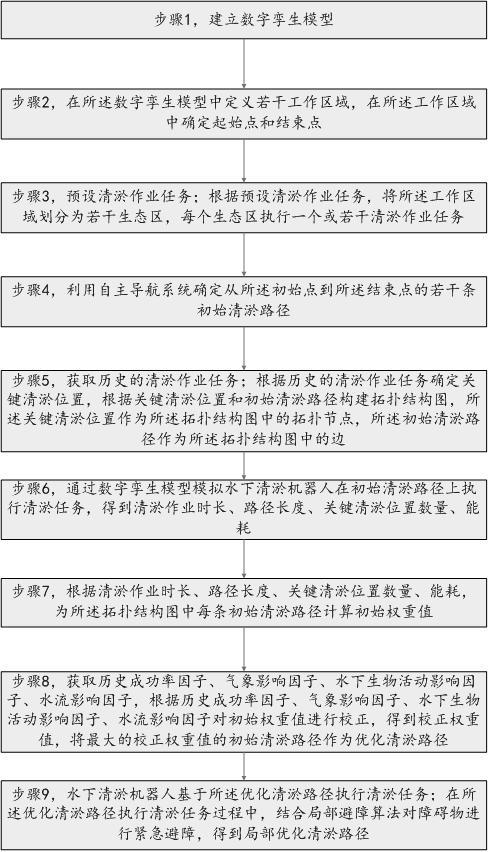
2、步骤1,建立数字孪生模型;
3、步骤2,在所述数字孪生模型中定义若干工作区域,在所述工作区域中确定起始点和结束点;
4、步骤3,预设清淤作业任务;根据预设清淤作业任务,将所述工作区域划分为若干生态区,每个生态区执行一个或若干清淤作业任务;
5、步骤4,利用自主导航系统确定从所述起始点到所述结束点的若干条初始清淤路径;
6、步骤5,获取历史的清淤作业任务;根据历史的清淤作业任务确定关键清淤位置,根据关键清淤位置和初始清淤路径构建拓扑结构图,所述关键清淤位置作为所述拓扑结构图中的拓扑节点,所述初始清淤路径作为所述拓扑结构图中的边;
7、步骤6,通过数字孪生模型模拟水下清淤机器人在初始清淤路径上执行清淤任务,得到清淤作业时长、路径长度、关键清淤位置数量、能耗;
8、步骤7,根据清淤作业时长、路径长度、关键清淤位置数量、能耗,为所述拓扑结构图中每条初始清淤路径计算初始权重值;
9、步骤8,获取历史成功率因子、气象影响因子、水下生物活动影响因子、水流影响因子,根据历史成功率因子、气象影响因子、水下生物活动影响因子、水流影响因子对初始权重值进行校正,得到校正权重值,将最大的校正权重值的初始清淤路径作为优化清淤路径;
10、步骤9,水下清淤机器人基于所述优化清淤路径执行清淤任务;在所述优化清淤路径执行清淤任务过程中,结合局部避障算法对障碍物进行紧急避障,得到局部优化清淤路径。
11、进一步地,获取历史成功率因子,具体包括:
12、步骤8a1,根据历史的清淤作业任务,获取历史的清淤作业任务的成功率、每个历史的清淤作业任务的完成时间、每个历史的清淤作业任务的复杂度因子、每个历史的清淤作业任务的环境相似度因子、每个历史的清淤作业任务的权重;
13、步骤8a2,根据历史的清淤作业任务的成功率、每个历史的清淤作业任务的完成时间、每个历史的清淤作业任务的复杂度因子、每个历史的清淤作业任务的环境相似度因子、每个历史的清淤作业任务的权重,计算得到历史成功率因子。
14、进一步地,获取气象影响因子,具体包括:
15、步骤8b1,从历史的清淤作业任务中获取气象指标;
16、步骤8b2,获取气象指标的影响程度评分;
17、步骤8b3,根据所有的气象指标以及影响程度评分,计算得到气象影响因子。
18、进一步地,获取水下生物活动影响因子,具体包括:
19、步骤8c1,确定所述生态区的敏感生物;
20、步骤8c2,获取当前所述生态区内敏感生物的数量;
21、步骤8c3,在当前所述生态区历史的清淤作业任务中,获取历史的水下清淤机器人与当前所述生态区内每个敏感生物之间的距离;
22、步骤8c4,获取当前所述生态区内敏感生物的行为模式;
23、步骤8c5,根据历史的水下清淤机器人与当前所述生态区内每个敏感生物之间的距离、当前所述生态区内敏感生物的行为模式、当前所述生态区内敏感生物的数量,计算得到水下生物活动影响因子。
24、进一步地,获取水流影响因子,具体包括:
25、步骤8d1,在每个生态区构建若干测量点;
26、步骤8d2,获取每个测量点的水流速度、水流速度变化量、水流方向;
27、步骤8d3,将所有测量点的水流速度由高到低进行排列,将前2/3的水流速度定义为强水流,并获取强水流的持续时间;
28、步骤8d4,根据历史的水下清淤机器人的前进方向与水流方向之间的夹角;
29、步骤8d5,根据水流速度、水流速度变化量、强水流的持续时间、夹角,计算得到水流影响因子。
30、进一步地,所述校正权重值的计算公式为:
31、;
32、式中,代表校正权重值,代表初始权重值,代表第k个历史的清淤作业任务的历史成功率因子,代表第j个气象指标的气象影响因子,代表第q个测量点的水流影响因子,m代表历史的清淤作业任务总数,n代表初始路径总数,p代表气象指标总数,z代表测量点总数。
33、进一步地,所述历史成功率因子的计算公式为:
34、;
35、式中,代表历史的清淤作业任务的历史成功率,代表当前时间,代表第k个历史的清淤作业任务的完成时间,代表第k个历史的清淤作业任务的复杂度因子,代表第k个历史的清淤作业任务的环境相似度因子,代表第k个历史的清淤作业任务的权重,代表调整系数。
36、进一步地,气象影响因子的计算公式为:
37、;
38、式中,max代表取最大值,代表第j个气象指标的影响程度评分。
39、进一步地,在所述优化清淤路径执行清淤任务过程中,结合局部避障算法对障碍物进行紧急避障,得到局部优化清淤路径,具体包括:
40、步骤91,在水下清淤机器人的当前位置周围构建一个局部图;所述局部图包括若干局部节点和若干前进方向;
41、步骤92,利用图搜索算法确定从水下清淤机器人的当前位置到周围安全区域的最短路径;
42、步骤93,水下清淤机器人的从当前位置沿着最短路径行进至临时局部节点,水下清淤机器人基于临时局部节点绕过障碍物再次行进至优化清淤路径,得到局部最优路径;基于局部最优路径进行动态避障。
43、本发明实施例具有以下技术效果:
44、本发明通过基于初始清淤路径,综合考虑历史成功率因子、气象影响因子、水下生物活动影响因子和水流影响因子对初始权重值进行校正,最终选择具有最大校正权重值的初始清淤路径作为优化清淤路径。这一创新方法不仅提升了清淤作业的安全性、效率和环保性,还引入了自主规划路径的能力,带来了多方面的显著有益效果。首先,通过引入历史成功率因子,本发明能够从过去的清淤任务中学习和优化,确保当前路径规划不仅基于静态地形图,还能参考历史任务的成功经验和失败教训,从而提高路径规划的鲁棒性和可靠性。根据历史任务成功率因子,识别出哪些区域在过去容易出现问题,并在规划新路径时自动避开这些高风险区域,进一步增强了路径规划的智能性和适应性。其次,气象影响因子的引入使得机器人能够在不同天气条件下自主选择最合适的路径,避免恶劣天气对作业效率和安全性的影响,确保清淤任务的顺利进行。机器人可以根据实时气象数据动态调整路径,确保在任何天气条件下都能高效、安全地完成任务。再者,水下生物活动影响因子的考虑使机器人能够自主识别并避开敏感生态区,保护水下生态环境,减少对珊瑚礁、海草床等重要栖息地的干扰,体现了环保理念。机器人通过实时监测水下生物活动,能够自动调整路径,避免对敏感生物造成影响,确保清淤作业的生态友好性。此外,水流影响因子的加入使得机器人能够根据实时水流情况自主调整路径,避免强水流区域,降低能耗并提高作业效率。机器人可以结合水流速度、方向和持续时间等因素,自主选择最优路径,确保在复杂的水流环境中也能高效作业。最后,通过对多个影响因子的综合评估,本发明实现了多目标优化,确保在清淤效率、能耗、时间成本和生态影响之间取得最佳平衡,提升了整体清淤作业的安全性、效率和环保性。机器人能够自主权衡各个因素,选择最适合当前环境条件的路径,确保每一次清淤任务都能达到最优效果。
45、综上所述,本发明不仅解决了传统方法的局限性,还为水下清淤机器人提供了更加智能、灵活和可持续的路径规划方案,推动了水下清淤技术的发展。通过自主规划路径,机器人能够在复杂多变的水下环境中,实时响应各种挑战,确保清淤作业的安全性、连续性和环保性。
46、本发明通过优化清淤路径执行清淤作业,并在遇到障碍物时,采用局部避障算法进行紧急避障,带来了多方面的显著有益效果。首先,在机器人当前位置构建局部图并确定从当前位置到周围安全区域的最短路径,使得机器人能够迅速响应突发的障碍物,避免碰撞和潜在的安全风险。这一方法不仅提高了机器人的实时反应能力,还确保了清淤作业的连续性和安全性,即使在复杂多变的水下环境中也能稳定运行。其次,通过从当前位置沿着最短路径行进至临时局部节点,机器人能够有效绕过障碍物,避免不必要的迂回,从而减少了额外的能耗和时间成本,提升了清淤效率。再次,基于临时局部节点绕过障碍物后,机器人能够迅速回归优化清淤路径,确保整体任务的顺利进行,不会因为单个障碍物而打乱整个作业计划。此外,通过计算局部最优路径并进行动态避障,机器人能够在保证安全的前提下,灵活应对各种复杂的环境变化,增强了系统的适应性和鲁棒性。最后,局部避障算法的应用不仅提高了机器人的自主导航能力,还减少了对人工干预的需求,降低了操作人员的工作负担,进一步提升了清淤作业的自动化水平。综上所述,本发明通过结合优化清淤路径和局部避障算法,不仅解决了传统方法在应对突发障碍物时的局限性,还为水下清淤机器人提供了更加智能、高效和安全的解决方案,推动了水下清淤技术的发展,确保了清淤作业的安全性、连续性和环保性。
- 还没有人留言评论。精彩留言会获得点赞!