一种获取施工边界的方法
1.本发明属于机械施工技术领域,特别涉及一种获取工程机械施工区域边界的方法。
背景技术:
2.在工程机械的无人化施工过程中,首先需要确定施工区域的范围,传统的确定施工区域范围的方法是通过密集的边界采点来实现,但对于需要进行路径规划的工程车辆,需要知道具体的施工区域各条边界的解析表达式才能进行最优路径规划。
3.目前传统的聚类算法大多是基于密度或距离的聚类算法,无法直接完成对施工区域各条边的聚类。
技术实现要素:
4.发明目的:针对现有技术中存在的问题,本发明提供一种获取施工边界的方法,实现对矩形和扇形施工区域边界的准确识别,识别准确度高,可满足绝大多数的施工工况,并且能够满足压路机的施工要求。
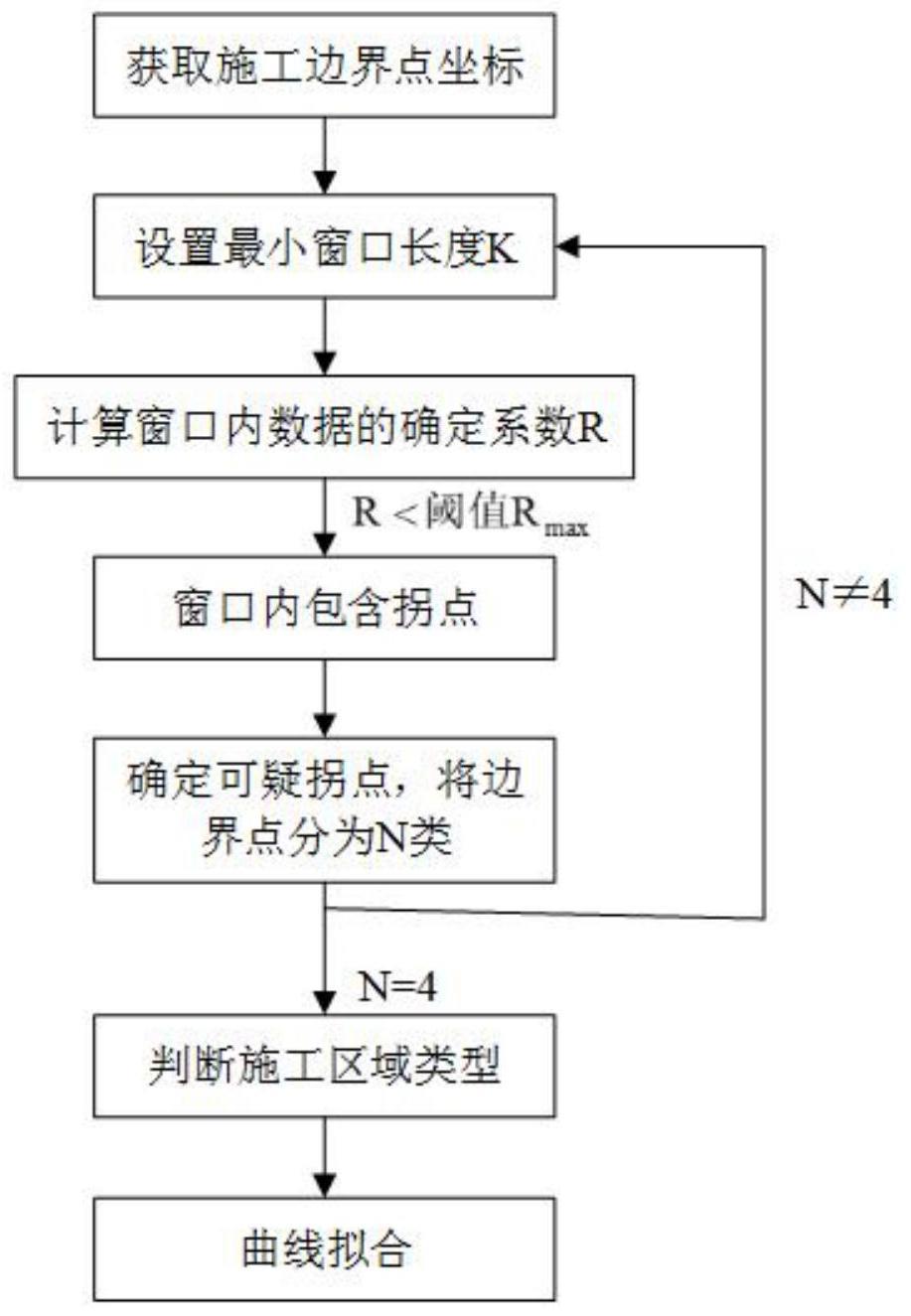
5.技术方案:为解决上述技术问题,本发明提供一种获取施工边界的方法,包括如下步骤:
6.(1)利用手持式gps设备获取施工边界点坐标;
7.(2)设置最小窗口长度k;
8.(3)计算窗口内数据的二次拟合确定系数r2;
9.(4)定义二次拟合阈值r
c2
为判断窗口内数据二次拟合效果好坏的标准,由于施工边界可能为一次或二次曲线,因此不包含拐点的窗口内数据的二次拟合确定系数r2较高,因此考虑设置较高的阈值r
c2
,如0.9。判断步骤(3)中得出的二次确定系数r2与阈值r
c2
的大小,如果二次确定系数r2小于阈值r
c2
则进入步骤(5);
10.(5)窗口内包含拐点,确定可以拐点,将边界点分为n类;
11.(6)判断n是否等于4,如果n=4则进入步骤(7),如果n≠4则返回步骤(2);
12.(7)判断施工区域类型,并进行曲线拟合即可得到由分段多项式表示的施工区域边界。
13.进一步的,所述步骤(1)中利用手持式gps设备获取施工边界点坐标的具体步骤如下:
14.在施工区域顶点处设置标志物,采集者手持gps设备从该标志物处出发,沿施工区域边界匀速行走一圈,即可得到一组按顺序采集的施工区域边界点集数据d。
15.进一步的,所述步骤(2)中设置最小窗口长度k的具体步骤如下:根据采集者的平均步行速度v(m/s)和gps设备接收频率f(hz),设置窗口长度其物理意义是采集者步行l米采集到的点。
16.进一步的,所述步骤(3)中计算窗口内数据的二次拟合确定系数r2的具体步骤如下:
17.根据确定的窗口长度k以及点集数据d,设置点集数据中第一个点为窗口起始点,从窗口起始点后取连续k个数据为窗口内元素,随后滑动窗口,将窗口起始点从第一个点按顺序滑动到最后一个点;
18.计算每一个窗口内数据的二次拟合确定系数r2,以此为标准判断窗口内数据拟合效果的好坏,二次拟合确定系数r2的计算公式如下:
[0019][0020]
其中:sst=ssr+sse,sst(total sum of squares)为总平方和,ssr(regression sum of squares)为回归平方和,sse(error sum of squares)为残差平方和。
[0021]
进一步的,所述步骤(5)中窗口内包含拐点,确定可以拐点,将边界点分为n类的具体步骤如下:将相邻两拐点之间的点归为一类,由于施工区域为闭合区域,则已知n个拐点即可将点击数据分为n类,每一类对应一条边界。
[0022]
进一步的,所述步骤(7)中判断施工区域类型,并进行曲线拟合即可得到由分段多项式表示的施工区域边界的具体步骤如下:
[0023]
定义一次拟合阈值r
c1
为判断边界上数据一次拟合效果好坏的标准,由于施工边界可能为一次或二次曲线,因此一次曲线边界上点的一次拟合确定系数r1较高,因此考虑设置较高的阈值r
c1
,如0.95。计算四条边上数据的一次拟合确定系数r
1i
(i=1,2,3,4),并进行排序,比较r
1i
的最小值与阈值r
c1
的关系,若r
1i
的最小值大于r
c1
,则对四条边都进行一次曲线拟合;若r
1i
的最小值小于r
c1
,则对一次拟合确定系数r
1i
最小的边及其对边进行圆弧拟合,对剩下的两条边进行一次曲线拟合,即可得到由分段多项式表示的施工区域边界。
[0024]
与现有技术相比,本发明的优点在于:本发明采用了滑动窗口内数据的二次拟合效果作为聚类指标,完成了对施工区域边界的拐点识别,进而解决了边界聚类的问题,且该方法可靠性高,适用于绝大多数压路机施工区域。
[0025]
滑动窗口起到了一定均值滤波的效果,减少了采集误差对边界识别的影响,避免了将噪声点误判为拐点的情况。
附图说明
[0026]
图1为本发明的方法流程图;
[0027]
图2为具体实施例中通过gps采点得到的边界点集数据图;
[0028]
图3为具体实施例中通过滑动窗口法识别出的可疑拐点范围图;
[0029]
图4为具体实施例中通过曲线拟合得到的施工区域边界形状图。
具体实施方式
[0030]
下面结合附图和具体实施方式,进一步阐明本发明。本发明描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的其他实施例,都属于本发明所保护的范围。
[0031]
如图1,一种获取施工边界的方法,利用手持式gps设备采集到一组绕施工区域边
界一周且间隔均匀的点;设置一固定长度的滑动窗口,将一定数量的数据放入窗口中,对窗口内的数据进行二次曲线拟合,并检验其拟合效果好坏,认为拟合效果好的窗口都在同一条边上,拟合效果差的窗口内包含拐点;将拟合效果差的窗口的重合部分记为可疑拐点,将除可疑拐点外的点自动归为n类,若n≠4则改变窗口长度重新遍历数据直到n=4,再对每一类数据进行曲线拟合即可得到由分段多项式表示的施工区域边界。该方法解决了一般聚类方法无法针对四边形各条边聚类的问题,同时窗口起到了一定的均值滤波的效果,避免了将噪声点误判为拐点的情况,识别准确率高。
[0032]
其中,在施工区域一顶点处设置一标志物,采集者手持gps设备从该标志物处出发,沿施工区域边界匀速行走一圈,即可得到一组按顺序采集的施工区域边界点集数据d。
[0033]
其中,根据采集者的平均步行速度v(m/s)和gps设备接收频率f(hz),设置窗口长度其物理意义是采集者步行l米采集到的点。
[0034]
其中,根据确定的窗口长度k以及点集数据d,设置点集数据中第一个点为窗口起始点,从窗口起始点后取连续k个数据为窗口内元素,随后滑动窗口,将窗口起始点从第一个点按顺序滑动到最后一个点。
[0035]
其中,计算每一个窗口内数据的二次拟合确定系数r2(coefficient of determination),以此为标准判断窗口内数据二次拟合效果的好坏,取二次拟合阈值为r
c2
,若窗口内数据的确定系数大于r
c2
则认为其拟合效果好,窗口内数据均在一条直线上;若窗口内数据的确定系数小于r
c2
则认为其拟合效果差,窗口内包含拐点。二次拟合确定系数r2的计算公式如下:
[0036][0037]
其中:sst=ssr+sse,sst(total sum of squares)为总平方和,ssr(regression sum of squares)为回归平方和,sse(error sum of squares)为残差平方和。
[0038]
其中,取拟合效果差的连续窗口的重合部分为可疑拐点范围,若可疑拐点的个数n=4,则成功识别拐点,若n≠4,则令窗口长度k=k+lf/v并重新计算可疑拐点范围,直到满足n=4,若循环到窗口长度k大于或等于数据长度仍无法满足条件,则需重新进行取点。
[0039]
其中,将相邻两可疑拐点范围之间的点归为一类,即可得到四条边的点集数据。
[0040]
其中,由于常见的施工区域边界分为矩形和扇形两种,首先需要对施工区域类型进行分类,计算四条边的点集数据的一次拟合确定系数r1,若四条边中一次拟合确定系数的最小值r
1min
>r
c1
,则认为其为矩形施工区域;若四条边中一次拟合确定系数的最小值r
1min
<r
c1
,则认为其为扇形施工区域。
[0041]
其中,对矩形施工区域四条边均进行一次曲线拟合,对扇形施工区域两条曲边进行基于最小二乘法的圆弧拟合,对扇形区域两条直边进行一次曲线拟合,即可得到由分段多项式表示的施工区域边界。
[0042]
实施例:
[0043]
在施工区域一顶点处设置一标志物,采集者手持gps设备从该标志物处出发,沿施工区域边界匀速行走一圈,即可得到一组按顺序采集的施工区域边界点集数据d,如图2所示。
[0044]
根据采集者的平均步行速度v(m/s)和gps设备接收频率f(hz),设置窗口长度k=5f/v,根据确定的窗口长度k以及点集数据d,设置点集数据中第一个点为窗口起始点,从窗口起始点后取连续k个数据为窗口内元素,随后滑动窗口,将窗口起始点从第一个点按顺序滑动到最后一个点。
[0045]
计算每一个窗口内数据的二次拟合确定系数r2,以此为标准判断窗口数据二次拟合效果的好坏,取0.9为阈值,若窗口内数据的确定系数大于0.9则认为其拟合效果好,窗口内数据均在一条直线上;若窗口内数据的确定系数小于0.9则认为其拟合效果差,窗口内包含拐点。取拟合效果差的连续窗口的重合部分为可疑拐点范围,如图3所示,判断可疑拐点数等于4,满足条件。将相邻两可疑拐点范围之间的点归为一类,即可得到四条边的点集数据。
[0046]
由于常见的施工区域边界分为矩形和扇形两种,首先需要对施工区域类型进行分类,计算四条边的点集数据的一次拟合确定系数r1,若四条边中确定系数的最小值大于0.95,则认为其为矩形施工区域;若四条边中确定系数的最小值小于0.95,则认为其为扇形施工区域。经计算,施工区域形状为扇形,因此对施工区域两条曲边进行基于最小二乘法的圆弧拟合,对区域两条直边进行一次曲线拟合,得到由分段多项式表示的施工区域边界,如图4所示。
[0047]
需要说明的是:以上所述仅为本发明的优选实施方式,并非用以限定本发明的权利范围;同时以上的描述,对于相关技术领域的专门人士应可明了及实施,因此其它未脱离本发明所揭示的精神下所完成的等效改变或修饰,均应包含在申请专利范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1