三维场景工程模拟与实景融合系统及方法与流程
[0001]
本发明涉及三维场景工程模拟与实景融合系统及三维场景工程模拟与实景融合方法。
背景技术:
[0002]
工程模拟软件是根据现实场景的几何对象进行建模分析得出仿真图像,为了将工程分析结果与现实场景相结合,一般将拍摄现实场景图片植入于仿真图像的表面,呈现包括有现实场景的工程状况图像。上述方法中获取的工程状况图像虽然具有现实场景,但上述工程状况图像中的实际场景与仿真图像只是简单的重叠,工程分析只能用近似旁观者的角度来分析问题,无法让分析人员在实景中融合仿真场景并进行人机互动,深入探索实际环境带来的影响,并将分析成果纪录、积累、可读、互动于虚实整合的场景中,从而提出更具全面性的分析成果。
技术实现要素:
[0003]
有鉴于此,有必要提供一种将三维场景的仿真图像与现实场景融合的系统及方法,为现实场景提供更适切的分析环境。
[0004]
一种三维场景工程模拟与实景融合系统,包括至少一存储器及至少一处理器,所述至少一存储器存储指令,所述处理器执行所述指令,所述指令包括:获取一现实场景的三维模型的每个点的三维坐标及与根据所述三维模型分析出的与每个点的三维坐标对应的工程数据;获取所述现实场景的至少一个点的位置信息;根据获取的至少一个点的位置信息及与所述至少一个点对应的三维坐标,建立三维模型的每个点的三维坐标与所述现实场景的每个点的位置信息的对应关系;提供一场景融合交互界面于一移动装置的显示屏上;响应在所述显示屏上摄取图像的操作实时获取所述现实场景中的目标场景的图像;获取所述移动装置的位置信息及方位信息;根据所述对应关系及所述移动装置的位置信息确定所述三维模型中与所述移动装置的位置信息对应的三维坐标;根据所述三维模型、确定的三维坐标、所述方位信息及所述移动装置的显示屏的尺寸确定与获取的所述图像对应的三维坐标范围;及根据在显示屏上融合场景的操作将所述三维坐标范围所对应的工程数据融合于所述目标场景的图像中形成融合有工程数据的现实场景工程模拟图像。
[0005]
一种三维场景工程模拟与实景融合方法,该方法包括:提取一现实场景的三维模型的每个点的三维坐标及与根据所述三维模型分析出的与每个点的三维坐标对应的工程数据;获取所述现实场景的至少一个点的位置信息;根据获取的至少一个点的位置信息及与所述至少一个点对应的三维坐标,建立三维模型的每个点的三维坐标与所述现实场景的每个点的位置信息的对应关系;提供一场景融合交互界面于一移动装置的显示屏上;响应在所述显示屏上摄取图像的操作实时获取所述现实场景中的目标场景的图像;获取所述移动装置的位置信息及方位信息;根据所述对应关系及所述移动装置的位置信息确定所述三维模型中与所述移动装置的位置信息对应的三维坐标;根据所述三维模型、确定的三维坐
标、所述方位信息及所述移动装置的显示屏的尺寸确定与获取的所述图像对应的三维坐标范围;及根据在显示屏上融合场景的操作将所述三维坐标范围所对应的工程数据融合于所述目标场景的图像中形成融合有工程数据的现实场景工程模拟图像。
[0006]
上述三维场景工程模拟与实景融合系统及方法可在实时获取现实场景中的目标场景的图像时将工程数据融合至所述目标场景的图像中,获取的现实场景融合工程模拟图像较现有技术中将仿真几何表面添加现实场景进行简单叠加所得到的结合场景,更能逼真地融合现实场景的状况,为所述现实场景提供更适切的分析环境。
附图说明
[0007]
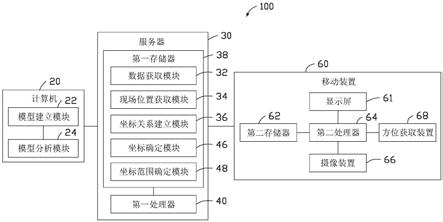
图1为一种三维场景工程模拟与实景融合系统的模块图。
[0008]
图2为图1中的第二存储器存储的模块图。
[0009]
图3为一种三维场景工程模拟与实景融合方法的流程图。
[0010]
图4为一种三维场景工程模拟与实景融合方法在另一实施方式中的流程图。
[0011]
主要元件符号说明
[0012]
[0013][0014]
如下具体实施方式将结合上述附图进一步说明本发明。
具体实施方式
[0015]
下面将结合附图对本发明作进一步详细说明。
[0016]
请参阅图1及图2,本发明提供了一种三维场景工程模拟与实景融合系统100。所述三维场景工程模拟与实景融合系统100用于将根据三维模型模拟的工程数据与在现场时的现实场景相结合,获得现实场景工程模拟图像,使观察者直观地了解现实场景的工程状况。
所述三维场景工程模拟与实景融合系统100包括模型建立模块22、模型分析模块24、数据获取模块32、现场位置获取模块34、坐标关系建立模块36、融合界面提供模块42、装置位置获取模块44、坐标确定模块46、坐标范围确定模块48及场景融合模块50。
[0017]
模型建立模块22用于建立现实场景的三维模型。模型分析模块24用于分析三维模型获取工程数据。所述工程数据可包括有多种工程参数的数据,如温度分布图、速度分布图、压力分布图、浓度分布图、烟流分布图等。所述工程数据可为静态的,也可为动态的二/三维后处理可视图像。如在某一时间的二/三维温度分布暂态图,在某一时间段内的二/三维温度变化动态图。所述模型建立模块22及所述模型分析模块24集成于一工程分析软件(如火灾仿真软件,fire dynamics simulator,简称fds)中,所述工程分析软件运行于一计算机20上。数据获取模块32用于获取三维模型的每个点的三维坐标及与每个点的三维坐标对应的工程数据。如三维模型中坐标为(0,0,0)的点温度为100摄氏度。现场位置获取模块34用于获取所述现实场景的至少一个点的位置信息,所述位置信息可包括经度及纬度,所述位置信息可为预先存储的。所述经度及纬度可从全球定位系统(gps)中获取。坐标关系建立模块36用于根据获取的至少一个点的位置信息及与所述至少一个点对应的三维坐标,建立三维模型的每个点的三维坐标与所述现实场景的每个点的位置信息的对应关系。由于三维模型是以所述现实场景建立的,因此,三维模型在建立时的几何边界与现实场景中的几何边界是对应的,可以三维模型的几何边界的起点或终点及现实场景中的几何边界的对应起点或终点为基准来建立两者之间的对应关系。如预先通过一gps定位装置获取一现实建筑物的一角落位置的经纬度,并存储所述角落位置及经纬度,在建模时以该角落位置为起始点来建立该现实建筑物的模型,然后根据存储的该角落位置的经纬度建立与该起始点坐标建立两者之间的对应关系,再根据经纬度与坐标的偏移方向及距离确定一转换关系,从而确定模型每个点所对应的经纬度。所述数据获取模块32、现场位置获取模块34及所述坐标关系建立模块36存储于第一存储器38并由第一处理器40执行。所述第一存储器38及所述第一处理器40置于服务器30中,所述服务器30与所述计算机20通信连接。
[0018]
融合界面提供模块42用于提供一场景融合交互界面于一移动装置60的显示屏61上,使所述移动装置60进入场景融合模式。所述移动装置60可为手机、平板电脑等。所述移动装置60包括第二存储器62、第二处理器64、摄像装置66及方位获取装置68。所述装置位置获取模块44存储于所述第二存储器62并由所述第二处理器64执行。
[0019]
所述摄像装置66用于在所述移动装置60处于所述场景工程融合模式时,响应用户在所述显示屏61上摄取图像的操作实时获取所述现实场景中的目标场景的图像。如操作手机上的摄像装置66进入摄像模式,手机的显示屏61上就会显示摄取到的现实场景中的图像。所述装置位置获取模块44用于获取所述移动装置60的位置信息,所述装置位置获取模块44可为置于所述移动装置60上的gps。所述方位获取装置68用于获取所述移动装置60的方位信息。所述方位获取装置68可为置于所述移动装置60上的陀螺仪。
[0020]
坐标确定模块46用于根据所述对应关系及所述移动装置60的位置信息确定所述三维模型中与所述移动装置60的位置信息对应的三维坐标。坐标范围确定模块48用于根据所述三维模型、确定的三维坐标、所述方位信息及所述移动装置60的显示屏61的尺寸确定与获取的所述图像对应的三维坐标范围。具体地,根据移动装置60的方位信息及确定的三维坐标确定所述移动装置60对应于三维模型中的面向的模型部分,再根据显示屏61的尺
寸、面向的模型部分、所述移动装置60对应于三维模型中的位置及所述移动装置60对应于三维模型中的位置与面向的模型部分的距离确定所述移动装置60在三维模型中可摄取的范围确定所述三维坐标范围。所述坐标确定模块46及所述坐标范围确定模块48存储于所述第一存储器38并由所述第一处理器40执行。
[0021]
场景融合模块50用于根据在显示屏61上融合场景的操作将所述三维坐标范围所对应的工程数据融合于所述目标场景的图像中形成融合有工程数据的现实场景工程模拟图像。如所述目标场景中包括一面墙,工程数据包括有这面墙的温度变化图,温度变化图中不同的温度采用不同的颜色表示,经过融合的现实场景工程模拟图像中的墙将具有颜色信息,使观察者可直观地知晓这面墙的某一时刻的温度暂态分布情况及某一时间段内的温度动态变化情况。在一实施方式中,所述场景融合交互界面提供多个供选择的融合选项,融合选项表示将要融合的工程参数,如温度变化,速度分布等。场景融合模块50根据选择的融合选项将与选择的融合选项对应的工程数据融合至所述目标场景的图像中。
[0022]
所述三维场景工程模拟与实景融合系统100还包括物件去除填充模块52、存储模块54、附加信息添加模块56、基本信息生成模块58、信息查询模块51及信息修改模块53。所述物件去除填充模块52用于根据在所述目标场景的图像中选择的物件将所述物件去除并根据去除区域的周边区域的物件填充所述去除区域,使所述去除区域与所述周边区域形成一整体。如所述目标场景的图像中包括一面墙,墙上固定有一盏灯,可通过物件去除填充模块52将灯去除并将去除灯的区域填充成墙。
[0023]
所述存储模块54用于实时保存所述现实场景模拟图像至所述第二存储器62,可以理解的是,也可将所述现实场景模拟图像实时存储于所述服务器30中。所述附加信息添加模块56用于根据用户在所述显示屏61上添加信息的操作在所述现实场景模拟图像上添加附加信息。所述附加信息包括但不限于文字、声音、图片、影音等。如此,可根据需要在现实场景模拟图像上的某处添加附加信息。所述基本信息生成模块58用于将添加者的身份信息及系统时间信息自动添加于所述附加信息中,如此,在查看时可知晓附加信息的添加者及添加的时间。所述信息查询模块51用于根据用户在所述显示屏61上查询信息的操作查询所述附加信息。所述信息修改模块53用于根据用户在所述显示屏61上修改信息的操作修改所述附加信息。
[0024]
在一实施方式中,所述物件去除填充模块52、所述存储模块54、所述附加信息添加模块56、所述基本信息生成模块58、所述信息查询模块51及所述信息修改模块53存储于所述第二存储器62并由第二处理器64执行。可以理解,所述物件去除填充模块52、所述存储模块54、所述附加信息添加模块56、所述基本信息生成模块58、所述信息查询模块51及所述信息修改模块53也可存储于所述第一存储器38并由第一处理器40执行。所述移动装置60将所述图像实时地传送至所述服务器30,从而实现远程也可对所述图像进行操作。
[0025]
可以理解的是,所述模型建立模块22、所述模型分析模块24、所述数据获取模块32、所述现场位置获取模块34、所述坐标关系建立模块36、所述坐标确定模块46及所述坐标范围确定模块48也可存储于所述第二存储器62并由所述第二处理器64执行。如此,只需所述移动装置60就可进行现实场景与工程数据的融合。
[0026]
请参阅图3,为本发明提供的一种三维场景工程模拟与实景融合方法的流程图,所述方法包括的步骤如下。
[0027]
步骤s70:获取一现实场景的三维模型的每个点的三维坐标及与根据所述三维模型分析出的与每个点的三维坐标对应的工程数据。所述三维坐标及所述工程数据从一工程分析软件对所述三维模型的建立及分析所得的数据中获得。
[0028]
步骤s72:获取所述现实场景的至少一个点的位置信息。所述位置信息可包括经度及纬度。所述现场坐标获取模块可从全球定位系统(gps)中获取。
[0029]
步骤s74:根据获取的至少一个点的位置信息及与所述至少一个点对应的三维坐标,建立三维模型的每个点的三维坐标与所述现实场景的每个点的位置信息的对应关系。
[0030]
步骤s76:提供一场景融合交互界面于一移动装置60的显示屏61上。所述移动装置60可为手机、平板电脑等。
[0031]
步骤s78:响应在所述显示屏61上摄取图像的操作实时获取所述现实场景中的目标场景的图像。
[0032]
步骤s80:获取所述移动装置60的位置信息及方位信息。
[0033]
步骤s82:根据所述对应关系及所述移动装置60的位置信息确定所述三维模型中与所述移动装置60的位置信息对应的三维坐标。
[0034]
步骤s84:根据所述三维模型、确定的三维坐标、所述方位信息及所述移动装置60的显示屏61尺寸确定与获取的所述图像对应的三维坐标范围。
[0035]
步骤s86:根据在显示屏61上融合场景的操作将所述三维坐标范围所对应的工程数据融合于所述目标场景的图像中形成融合有工程数据的现实场景工程模拟图像。
[0036]
请参阅图4,在另一实施方式中,所述三维场景工程模拟与实景融合方法还包括如下步骤。
[0037]
步骤s85:根据在所述目标场景的图像中选择的物件将所述物件去除并在所述物件去除后根据去除区域的周边区域的物件填充所述去除区域。
[0038]
步骤s88:实时保存所述现实场景模拟图像。
[0039]
步骤s90:根据在所述显示屏61上添加信息的操作在所述现实场景模拟图像上添加附加信息并将添加者的身份信息及系统时间信息自动添加于所述附加信息中。
[0040]
步骤s92:根据在所述显示屏61上查询信息的操作查询所述附加信息。
[0041]
步骤s94:根据在所述显示屏61上修改信息的操作修改所述附加信息。
[0042]
上述三维场景工程模拟与实景融合系统100及三维场景工程模拟与实景融合方法可在实时获取现实场景中的目标场景的图像时将工程数据融合至所述目标场景的图像中,获取的现实场景融合工程模拟图像较现有技术中将仿真几何表明添加现实场景进行简单叠加所得到的结合场景,更能逼真地融合现实场景的状况,为所述现实场景提供更适切的分析环境,另外,上述三维场景工程模拟与实景融合系统100及三维场景工程模拟与实景融合方法还可通过场景融合交互界面对图像进行标记及进行信息添加、修改、查询等操作,实现人机交互,利于给出更全面性的分析成果。
[0043]
本技术领域的普通技术人员应当认识到,以上的实施方式仅是用来说明本发明,而并非用作为对本发明的限定,只要在本发明的实质精神范围之内,对以上实施例所作的适当改变和变化都落在本发明所公开的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1