面部表情采集系统的制作方法
[0001]
本发明属于表情采集技术领域,尤其涉及一种面部表情采集系统。
背景技术:
[0002]
人脸面部表情识别技术是心理学及生物特征识别等领域的重要交叉课题,也是近年来的一个研究热点。但是面部表情的复杂、微妙等特征增大了识别难度。其主要表现在人脸面部表情识别的准确性不够,造成面部关键部位的特征定位不准确,从而给表情的特征提取与识别造成困难。
[0003]
目前,面部表情采集系统的研究主要是基于光学探测器采集到的二维平面图像,通过二维图像采集人脸面部表情,再利用计算机方法对其特征进行提取和识别。但是由于面部表情非常复杂,传统图像不能探测到微小的面部特征,导致后续计算机数据处理无法提取到更丰富的特征,造成研究范围和科研成果受限。
技术实现要素:
[0004]
本发明的目的在于提供一种面部表情采集系统,旨在解决现有技术中人脸面部表情采集不够精细的技术问题。
[0005]
本发明提供了一种面部表情采集系统,包括调整架组件、与所述调整架组件连接的探测器组件,所述探测器组件包括两个探测器。
[0006]
优选的,所述调整架组件包括x轴移动组件和y轴移动组件。
[0007]
优选的,所述x轴移动组件包括x轴光栅位移传感器、x轴驱动电机、x轴导轨;所述y轴移动组件包括y轴光栅位移传感器、y轴驱动电机、y轴导轨。
[0008]
优选的,所述x轴移动组件还包括x轴移动框架、x轴丝杠组件;所述y轴移动组件还包括y轴移动框架、y轴丝杠组件。
[0009]
优选的,所述两个探测器均包括镜头、面阵探测器、调焦位移机构、探测器支撑框架,所述镜头、面阵探测器、调焦位移机构均安装于所述探测器支撑框架中。
[0010]
优选的,所述调焦位移机构包括调焦光栅位移传感器。
[0011]
本发明示出的面部表情采集系统采用双镜头对人脸面部表情进行立体采集,并采用调整架组件进行精确定位,为判断被测者的心理学和生物学研究提供了高精度的技术手段。
附图说明
[0012]
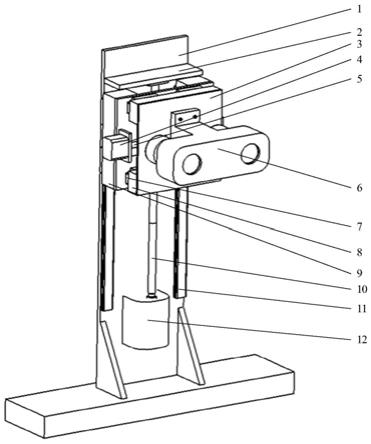
图1是本发明实施例示出的面部表情采集系统中调整架组件的结构示意图。
[0013]
图2是本发明实施例示出的面部表情采集系统中探测器组件的结构示意图。
[0014]
图3是本发明实施例的示出的被试者坐标系示意图。
[0015]
图4是本发明实施例的示出的对被试者坐标系的位置进行信息采集的示意图。
[0016]
图中的附图标记表示为:
[0017]
机体框架1、y轴移动框架2、x轴移动框架3、x轴驱动电机4、x轴丝杠组件5、探测器组件6、x轴导轨7、x轴光栅位移传感器8、y轴光栅位移传感器9、y轴丝杠组件10、y轴导轨11、y轴驱动电机12、探测器支撑框架13、镜头14、探测器15、探测器16、调焦位移机构17、调焦光栅位移传感器18、面阵探测器19。
具体实施方式
[0018]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0019]
以下结合具体实施例对本发明的具体实现进行详细描述:
[0020]
如附图1-2所示,本实施例提供的面部表情采集系统包括调整架组件、与所述调整架组件连接的探测器组件,所述探测器组件包括两个探测器。
[0021]
调整架组件通过移动可对探测器组件进行位置调节,从而可以从不同位置对被试者进行表情样本采集,并记录当前采集的实时位置。
[0022]
具体的,调整架组件包括x轴移动组件和y轴移动组件,也还可包括机体框架1。
[0023]
通过x轴移动组件和y轴移动组件,分别对探测器组件在x轴方向和y轴方向上的位置进行调节。
[0024]
具体的,x轴移动组件包括x轴光栅位移传感器8、x轴驱动电机4、x轴导轨7;y轴移动组件包括y轴光栅位移传感器9、y轴驱动电机12、y轴导轨11。
[0025]
通过x轴驱动电机4驱动探测器组件沿着x轴导轨7移动,以改变探测器组件在x轴方向的位置,并且通过x轴光栅位移传感器8记录当前的x轴位置信息;通过y轴驱动电机12驱动探测器组件沿着y轴导轨11移动,以改变探测器组件在y轴方向的位置,并且通过y轴光栅位移传感器9记录当前的y轴位置信息。
[0026]
可选的,x轴移动组件还包括x轴移动框架3、x轴丝杠组件5;y轴移动组件还包括y轴移动框架2、y轴丝杠组件10。当移动x轴移动框架3或y轴移动框架2时,通过x轴驱动电机4、y轴驱动电机12带动x轴丝杠组件5、y轴丝杠组件10实现探测器组件的移动。
[0027]
探测器组件包括两个探测器,即探测器15、探测器16。
[0028]
两个探测器的结构相同,具体的,以探测器15为例,探测器15包括镜头14、面阵探测器19、调焦位移机构17、探测器支撑框架13,所述镜头14、面阵探测器19、调焦位移机构17均安装于所述探测器支撑框架13中。
[0029]
其中,调焦位移机构17包括调焦光栅位移传感器18,以记录调焦后的焦面位置。
[0030]
本系统采用双镜头对人脸面部表情进行立体采集,并采用调整架组件进行精确定位,为判断被测者的心理学和生物学研究提供了高精度的技术手段。
[0031]
可选的,在进行人脸面部表情的采集时,采用被试者坐标系,被试者坐标系为以被试者面部中心为坐标系原点的点光源,点光源分布在被试者的周围,坐标为被试者坐标系下预先测定如图3所示。
[0032]
为保证足够的视场和分辨率,需要确定探测器镜头的f数为4,较大的f数可以获得较大的视场,提高人脸识别的观测范围,同时具有足够的分辨率;为了能达到预期的人脸识别精度及足够的观测范围,需要探测器的像元数为2kx2k,像元尺寸为5μm。
[0033]
为达到高精度的3d立体表情识别数据,用传统方法对所述光电探测装置进行面阵相机标定,得到所述光电探测装置的相机主距和主点位置,并对所述光电探测装置进行畸变校正,得到所述面阵ccd成像探测器上每一行列像元的实际位置。再通过被试坐标系下的固定点对相机的位置、姿态进行实时定向,最后通过实时标定的主距和主点以及相机位置通过计算得到3d立体图像。
[0034]
下面将对采用本系统进行人脸面部表情的使用原理进行详细描述。
[0035]
在采用本系统进行人脸面部表情的采集时,读数前需要预先记录x轴光栅位移传感器8、y轴光栅位移传感器9的位置信息,x轴和y轴的信息为初始位置(x0,y0)。当移动框架(x轴或y轴)移动时,通过x轴驱动电机4、y轴驱动电机12带动x轴丝杠组件5、y轴丝杠组件10实现探测器组件的移动,x和y调整架组件上分别带有光栅位移读数装置,通过读取光栅位移传感器的光栅位置信号记录调整架组件的当前位置(xi,yi),通过和初始位置(x0,y0)比较得到(δx,δy),分别将相机摄影中心的初始位置(xsi0,ysi0)相叠加得到实时的摄影中心位置(xsi0+δx,ysi0+δy),本发明涉及到两个探测器,因此叠加后的摄影中心的实时坐标为(xs1,ys1)和(xs2,ys2)。本发明的立体成像效果需要通过双相机保证,因此需要探测器组件包括两个探测器,即探测器15和探测器16。
[0036]
探测器15包括镜头14,面阵探测器19,调焦位移机构17,其中调焦位移机构17内部安装调焦光栅位移传感器18,它可以记录调焦后的焦面位置,通过和初始位置比较得到调焦位置的变化量δf,将调焦位置的变化量和预先标定的主距f10叠加,得到实时的主距f1i;用同样的方法得到探测器16的实时主距f2i。
[0037]
被试坐标系包括被试坐标系下的点光源,通过探测器15和探测器16同时对点光源成像,根据像点所在像元的行列数得到焦平面处像点的坐标值,由已知的点光源在被试坐标系下的坐标利用后方交会法计算出探测器15和探测器16的摄影中心初始位置。在对被试者进行样本采集时,可以从多个角度对被试者进行样本采集,通过驱动x轴驱动电机4和y轴驱动电机12使探测器组件在xy平面内移动,并保证探测器15和探测器16同时采集到被试者的表情样本图像。
[0038]
探测器组件移动时,光栅位移传感器可以记录探测器的位置。移动要求上,调节导轨与丝杠的位置使丝杠运动顺畅无卡滞。
[0039]
在对被试者采样前,首先对系统中的光电探测器进行标定,标定相机初始主距和主点位置,并校正光电探测装置的畸变。在对光电探测装置进行标定时,可利用测角法对面阵相机进行内方位元素标定,得到探测器1和探测器2的初始主距f0和畸变(u10,v10),其中u10为主点在探测器图像坐标系下的横坐标,v10为主点在探测器图像坐标系下的纵坐标。
[0040]
对光电探测装置进行面阵相机标定后,再对光电探测装置进行畸变校正,得到准确的初始坐标值,保证后期样本立体采样的处理精度。通过对标准光源的检测装置进行成像,得到每一个像元对应实际物方坐标的像方坐标,从而得到探测器15的面阵ccd上每一行列像元在对应的实际位置坐标。用同样的方法标定探测器16的主点位置(u20,ν20)和主距以及畸变。
[0041]
取被试者头部为中心,如图3-4所示,在被试者周围建立已知坐标点(xi,yi,zi),对已知坐标进行成像,通过对被试坐标系的位置进行焦面调整,根据光栅位置传感器记录的读数得到焦距的变化量
△
f0,由变化量
△
f0和已知的相机主距f叠加得到调焦后的实时
主距f0’,由实时主距f0’和标定得到的畸变(u10,v10)、(u20,v20),通过后方交会法得到探测器1的摄影中心位置(xs10,ys10,zs10)、角元素(φ1,ω1,κ1)和探测器16的摄影中心的坐标(xs20,ys20,zs20)、角元素(φ2,ω2,κ2)。在获得摄影中心位置和角度后,对被试者进行面部图像的采样。
[0042]
首先对被试者的像面位置进行焦面调整,直到像面处于采样清晰位置,根据光栅位置传感器记录的读数得到焦距的变化量
△
f,由变化量
△
f和已知的相机主距f叠加得到调焦后的实时主距f’。移动调整架组件,根据测得的位置改变量(δx,δy),叠加得到改变后的摄影中心坐标(xs1,ys1,zs1)和(xs2,ys2,zs2)。其次根据计算的外方位角元素(φ1,ω1,κ1)和角元素(φ2,ω2,κ2)得到被试坐标系下的旋转矩阵r1、r2,根据旋转矩阵r1、r2利用坐标变换的方法逐点计算像点的辅助坐标(u1,v1,w1)及(u2,v2,w2)。第三步根据测得的摄影中心位置求出两探测器的基线分量(xs1-xs2,ys1-ys2,zs1-zs2),即(bu,bv,bw),从而计算投影系数(n1,n2),再根据旋转矩阵计算的各点像点辅助坐标(u1,v1,w1)及(u2,v2,w2)和投影系数n1和n2计算目标中的各图像点,在各自像辅助空间坐标系的坐标(u1,v1,w1)和(u2,v2,w2)。最后由前方交汇的方法计算得到被试目标的各像元点的空间坐标(xij,yij,zij)。对所有像元对应的像点需要逐一计算,得到左右像元对应的物点位置信息。最后对被试者采集的图像信息进行逐个像元点的图像匹配,即将计算得到的各点物方位置信息和相应的灰度值进行图像恢复。根据所得到的各像点实际位置和相应的采样灰度值对采样信息进行逐点3d立体图像构建得到高清的3d表情图像。3d立体采样图像具有更丰富的信息内容,根据3d立体表情图像可以进行更丰富的特征提取和更多的模式识别。
[0043]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1