一种基于深度ISA数据融合的植被类型识别方法与流程
一种基于深度isa数据融合的植被类型识别方法
技术领域
[0001]
本发明涉及林业信息技术领域,尤其涉及一种基于深度isa数据融合的植被类型识别方法。
背景技术:
[0002]
在应用遥感手段提取植被类型的空间分布信息时,利用单时相遥感数据通常只能用到植被的光谱特征,没有考虑植被的季节变化和物候特征。时间序列遥感数据可有效利用植被的季相变化和物候特征,现已广泛用于植被类型分类研究中。但是,由于传感器的设计需要在时间分辨率和空间分辨率上进行权衡,限制了该类传感器的监测能力。为了同时获得中高空间分辨率和高时间分辨率的遥感影像,许多学者提出将中高空间分辨率和高时间分辨率影像进行数据融合形成高时空遥感数据。高时空遥感数据的实质是在遥感时序数据的基础上,提高其空间分辨率。然而高空间分辨率遥感时序数据通常具有噪音多,维度高,时间依赖性强,参与建模的特征表达较为复杂等特点。
[0003]
针对该问题一般采用两种方法解决,第一种通过利用先验知识,人工提取相关特征,如在植被类型遥感时序数据分类中,提取遥感时序影像的植被指数特征,手动选取具有代表性的植被指数特征分层分类,但是通过此种方法进行特征设计必须基于很强的先验知识,人为不确定性较强;第二种是采取信号处理中的特征提取和特征降维方法,如主成分变换等,对输入的时序数据进行降维,这种方法的特点是特征参数需要大量时间调节才能达到预期效果。
技术实现要素:
[0004]
近年来,人工智能科学得到了普遍关注和大力发展,而人工神经网络作为一种以模拟人脑映射为原理的遥感图像分类处理算法,也更被遥感领域的专家和学者所关注,相对于传统的以统计学基础为原理的分类方法,人工神经网络分类算法具有强大的自学习能力、容错能力、无需事先假设概率模型等特点。
[0005]
深度学习是2006年由多伦多大学的geoffery hinton教授及其同事提出的,起源于人工神经网络的,它是一种包含多个隐含层的感知器,使用低层特征形成高层特征,并使用更加抽象的高层特征表示地物的类别,进而得到数据的分布式特征表示。卷积神经网络因其局部子采样、全局训练、共享权值等特点,具有位移不变性等优势,在图像识别领域应用广泛。
[0006]
目前,越来越多的研究聚焦于从无标签的输入数据中自动学习有效的特征表达。深度卷积isa神经网络是多个“独立子空间分析(isa)”,其模型正符合这一特点,首先,利用该类模型不需要手工设计特征,模型能够自动直接的从数据中提取特征;其次,大量试验已证明这种层次模型更能够提取到图像的本质信息。
[0007]
modis是搭载在terra和aqua卫星上的一个重要的传感器,是卫星上唯一将实时观测数据通过x波段向全世界直接广播,并可以免费接收数据并无偿使用的星载仪器,全球许
多国家和地区都在接收和使用modis数据。
[0008]
modis的全称为中分辨率成像光谱仪(moderate-resolution imaging spectroradiometer),它的多波段数据可以同时提供反映陆地表面状况、云边界、云特性、海洋水色、浮游植物、生物地理、化学、大气中水汽、气溶胶、地表温度、云顶温度、大气温度、臭氧和云顶高度等特征的信息;可用于对地表、生物圈、固态地球、大气和海洋进行长期全球观测。
[0009]
landsat影像数据为陆地卫星获取的影像数据。
[0010]
基于上述技术基础,本发明首先基于数据融合模型,生成中高时空分辨率遥感时间序列数据集,然后基于该数据,构建深度卷积isa神经网络模型,进行植被类型分类;能够优化单时相遥感数据植被类型分类效果,同时提升中高时空分辨率遥感时序植被类型分类的自动化水平。
[0011]
为达到上述目的,本发明采用如下技术方案:
[0012]
一种基于深度isa数据融合的植被类型识别方法,所述基于深度isa数据融合的植被类型识别方法包括以下步骤:
[0013]
基于时间t获取modis数据和landsat影像数据并进行预处理;
[0014]
构建时空适应性反射率融合模型融合modis数据和landsat影像数据并生成时序遥感影像数据集;
[0015]
基于时序遥感影像数据集构建深度卷积isa神经网络模型;
[0016]
根据构建的深度卷积isa神经网络模型对预测影像进行分类,并生成植被类型遥感分布图。
[0017]
依照本发明的一个方面,所述构建时空适应性反射率融合模型融合modis数据和landsat影像数据包括:基于时间t,获取t1、t2时刻的modis数据和landsat影像数据,基于t1时刻的modis数据、landsat影像数据和t2时刻的modis数据构建时空适应性反射率融合模型,融合modis数据和landsat影像数据生成landsat时间序列数据集。
[0018]
依照本发明的一个方面,所述时序遥感影像数据集包括landsat时间序列数据集和基于landsat时间序列数据集提取的植被指数数据集。
[0019]
依照本发明的一个方面,所述基于深度isa数据融合的植被类型识别方法包括:基于landsat时间序列数据集和提取的植被指数数据集进行不同类型不同尺度结果比较获得最优的植被指数融合结果。
[0020]
依照本发明的一个方面,所述时空适应性反射率融合模型为:
[0021][0022]
其中,(x
i
,y
j
)代表像元在影像中的位置;m(x
i
,y
j
,t0)为在给定时间t0下,像元(x
i
,y
j
)在modis影像上的表面反射率;m(x
i
,y
j
,t
k
)为在给定时间t
k
下,像元(x
i
,y
j
)在modis影像上的表面反射率l(x
i
,y
j
,t
k
)为在给定时间t
k
下,像元(x
i
,y
j
)在landsat影像上的表面反射率。
[0023]
依照本发明的一个方面,所述时空适应性反射率融合模型的构建过程具体包括:基于landsat影像数据,通过选取以预测像元为中心的邻域窗口,并利用权重函数对窗口内像元进行卷积运算,确定中心像元的预测值,然后在整幅影像上滑动卷积窗口,得到预测影
像。
[0024]
依照本发明的一个方面,所述基于时序遥感影像数据集构建深度卷积isa神经网络模型包括:
[0025]
基于生成的时序遥感影像数据集,通过设置邻域窗口大小,为图像上的每个待分类像元选定邻域窗口大小为n*n的一片区域;
[0026]
基于选定的区域生成一维时序光谱向量集,对于m天的数据,输入向量的维数为27m;
[0027]
构建第一层isa(独立子空间分析)特征学习方法;
[0028]
在第一层isa特征学习的基础上,利用pca方法对输出结果进行降维;
[0029]
构建下一层isa模型,并形成层次化的深度isa学习模型;
[0030]
训练并形成深度isa网络分类模型。
[0031]
依照本发明的一个方面,所述isa(独立子空间分析)特征学习方法为:通过对图像的无监督学习来获取图像内部所隐含的信息,包括下采样和池化两层结构。
[0032]
依照本发明的一个方面,所述构建下一层isa模型,并形成层次化的深度isa学习模型包括以下阶段:
[0033]
预训练阶段,采用逐层训练的方式,获取层次化的特征学习结果;
[0034]
微调阶段,采用有监督的对最后一层的bp神经网络进行训练,通过将实际输出与预测输出的误差向后传播,从而对整个网络的权值进行微调。
[0035]
依照本发明的一个方面,所述构建下一层isa模型包括:通过isa方法堆栈形成深度网络结构,包括网络深度分析评价和isa节点数评价。
[0036]
本发明实施的优点:本发明所述的基于深度isa数据融合的植被类型识别方法,包括以下步骤:基于时间t获取modis数据和landsat影像数据并进行预处理;构建时空适应性反射率融合模型融合modis数据和landsat影像数据并生成时序遥感影像数据集;基于时序遥感影像数据集构建深度卷积isa神经网络模型;根据构建的深度卷积isa神经网络模型对预测影像进行分类,并生成植被类型遥感分布图;首先基于数据融合模型,生成中高时空分辨率遥感时间序列数据集,然后基于该数据,构建深度卷积isa神经网络模型,进行植被类型分类,能够优化单时相遥感数据植被类型分类效果,同时提升中高时空分辨率遥感时序植被类型分类的自动化水平。
附图说明
[0037]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0038]
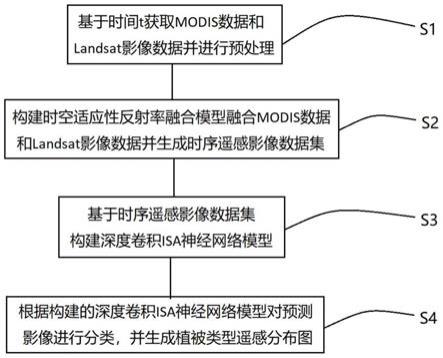
图1为本发明所述的基于深度isa数据融合的植被类型识别方法示意图;
[0039]
图2为本发明所述的时序遥感影像数据集生成示意图;
[0040]
图3为本发明所述的深度卷积isa神经网络模型的构建及应用示意图。
具体实施方式
[0041]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0042]
如图1、图2和图3所示,一种基于深度isa数据融合的植被类型识别方法,所述基于深度isa数据融合的植被类型识别方法包括以下步骤:
[0043]
步骤s1:基于时间t获取modis数据和landsat影像数据并进行预处理;
[0044]
步骤s2:构建时空适应性反射率融合模型融合modis数据和landsat影像数据并生成时序遥感影像数据集;
[0045]
步骤s3:基于时序遥感影像数据集构建深度卷积isa神经网络模型;
[0046]
步骤s4:根据构建的深度卷积isa神经网络模型对预测影像进行分类,并生成植被类型遥感分布图。
[0047]
在实际应用中,本发明实施例可具体划分为以下三个部分,其具体实现如下所示:
[0048]
1)中高时空分辨率遥感时间序列数据集(即时序遥感影像数据集)的生成;如图2所示,基于时间t,获取t1、t2时刻的modis数据和landsat影像数据;
[0049]
选择t1时刻的modis数据、landsat影像数据和t2时刻的modis数据构建时空适应性反射率融合模型(starfm),以下简称starfm,具体公式为:
[0050][0051]
其中,(x
i
,y
j
)代表像元在影像中的位置;m(x
i
,y
j
,t0)为在给定时间t0下,像元(x
i
,y
j
)在modis影像上的表面反射率;m(x
i
,y
j
,t
k
)为在给定时间t
k
下,像元(x
i
,y
j
)在modis影像上的表面反射率l(x
i
,y
j
,t
k
)为在给定时间t
k
下,像元(x
i
,y
j
)在landsat影像上的表面反射率。
[0052]
具体通过选取以预测像元为中心的邻域窗口,并利用权重函数对窗口内像元进行卷积运算,确定中心像元的预测值,然后在整幅影像上滑动卷积窗口,得到预测影像。
[0053]
在实际应用中,模型在应用时需要考虑两个主要参数,一个是移动窗口的大小,另一个是权重函数的实现方式,包括空间距离的计算方法以及权重因子表达方法。
[0054]
在一实施方式中,拟采用的移动窗口大小为90m,150m和750m,采用的空间距离计算方法为欧式距离的线性变换,权重因子的表达方式为距离的倒数。
[0055]
由于starfm算法实现的是不同传感器、不同时空分辨率的遥感影像,该算法的实现过程中需要考虑与中心像元具有相似光谱特征的候选像元选取以及异常候选像元剔除等问题。
[0056]
在本实施例中,采用阈值法来选取候选像元,即将与中心像元的光谱之差小于阈值的邻域像元作为候选像元。对于异常像元的剔除,根据landsat和modis的质量评价数据掩膜,从而剔除质量差的候选像元。
[0057]
在实际应用中,所述时序遥感影像数据集包括starfm模型生成的landsat时间序列数据集和基于landsat时间序列数据集提取的植被指数数据集,基于landsat时间序列数据集和提取的植被指数数据集进行不同类型不同尺度结果比较获得最优的植被指数融合
结果。
[0058]
2)深度卷积isa神经网络模型的构建;
[0059]
如图3所示,在本实施例中基于生成的时序遥感影像数据集,通过设置邻域窗口大小,为图像上的每个待分类像元选定邻域窗口大小为3*3的一片区域。
[0060]
基于选定的区域生成一维时序光谱向量集,对于m天的数据,输入向量的维数为27m。
[0061]
构建第一层独立子空间分析(independent subspace analysis,isa)特征学习方法,isa方法的基本原理是通过对图像的无监督学习来获取图像内部所隐含的信息,该方法是对独立成分分析方法(independent component analysis,ica)的扩展,包括下采样和池化两层结构。
[0062]
在第一层isa特征学习的基础上,利用pca方法对输出结果进行降维;
[0063]
构建下一层isa模型,并形成层次化的深度isa学习模型;
[0064]
所述构建下一层isa模型包括:通过isa方法堆栈形成深度网络结构,包括网络深度分析评价和isa节点数评价。
[0065]
形成层次化的深度isa学习模型包括以下阶段:
[0066]
预训练阶段,采用逐层训练的方式,获取层次化的特征学习结果;
[0067]
微调阶段,采用有监督的对最后一层的bp神经网络进行训练,通过将实际输出与预测输出的误差向后传播,从而对整个网络的权值进行微调。
[0068]
训练并形成深度isa网络分类模型。
[0069]
3)根据构建的深度卷积isa神经网络模型对预测影像进行分类,并生成植被类型遥感分布图;
[0070]
将待预测影像输入构建的深度卷积isa神经网络模型进行预测,然后进行模型结果比较,最后生成植被类型遥感分布图。
[0071]
本发明实施的优点:本发明所述的基于深度isa数据融合的植被类型识别方法,包括以下步骤:基于时间t获取modis数据和landsat影像数据并进行预处理;构建时空适应性反射率融合模型融合modis数据和landsat影像数据并生成时序遥感影像数据集;基于时序遥感影像数据集构建深度卷积isa神经网络模型;根据构建的深度卷积isa神经网络模型对预测影像进行分类,并生成植被类型遥感分布图;首先基于数据融合模型,生成中高时空分辨率遥感时间序列数据集,然后基于该数据,构建深度卷积isa神经网络模型,进行植被类型分类,能够优化单时相遥感数据植被类型分类效果,同时提升中高时空分辨率遥感时序植被类型分类的自动化水平。
[0072]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本领域技术的技术人员在本发明公开的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1