市场系统的制作方法
1.本说明书公开市场系统。
背景技术:
2.以往,提出有能够从生产设备的供应商对元件安装机等生产设备的交货地的企业提供服务信息的系统(例如参照专利文献1)。在该系统中,供应商能够将元件的正常姿势的图像数据即识别数据、元件的尺寸数据、安装条件数据等存储于库,各企业能够检索库来取得需要的信息。
3.现有技术文献
4.专利文献1:日本特开2002-359500号公报
技术实现要素:
5.发明所要解决的课题
6.上述的识别数据用于根据在生产设备中保持元件等工件时拍摄该工件而得到的图像来判定保持位置有无偏差或姿势的优劣等。然而,根据生产设备具有的相机和照明等拍摄系统的规格和配置的不同等,有时映现于图像的工件的轮廓等形状产生少许不同。因此,为了适当地进行图像处理,优选根据在生产设备的拍摄系统中实际拍摄工件而得到的图像来生成识别数据。但是,在生产设备的交货地分别进行识别数据的生成的情况下,识别数据的生成需要时间,因此,生成负担变大。
7.本公开的主要目的在于减少图像处理所需的数据的生成负担并且适当地进行图像处理。
8.用于解决课题的技术方案
9.本公开为了实现上述的主要目的而采取以下的方案。
10.本公开的市场系统能够通过网络提供生产设备所需的数据,上述生产设备伴随着由拍摄系统拍摄到的工件的图像处理进行生产,其主旨在于,上述市场系统具备:存储部,将多个形状数据与上述拍摄系统及上述工件的种类建立对应地存储,上述多个形状数据是按照每个上述拍摄系统而根据对上述工件拍摄到的图像所生成的且在上述图像处理中成为上述工件的形状的基准;及提供部,能够通过上述网络将存储于上述存储部的数据提供给上述生产设备的顾客。
11.在本公开的市场系统中,将多个形状数据与拍摄系统及工件的种类建立对应地存储,上述多个形状数据是按照每个拍摄系统而根据对工件拍摄到的图像所生成的且在图像处理中成为工件的形状的基准。另外,通过网络将所存储的数据提供给生产设备的顾客。由此,不需要顾客生成形状数据,因此,能够缩短准备形状数据的时间。另外,形状数据是按照每个拍摄系统而根据对工件拍摄到的图像所生成的,所以能够适当地进行与顾客的生产设备的拍摄系统对应的图像处理。因此,能够减少图像处理所需的数据的生成负担并且适当地进行图像处理。
附图说明
12.图1是表示设备导入支援系统10的结构的概略的结构图。
13.图2是表示市场平台mp的概略的说明图。
14.图3是表示作业系统60的结构的概略的结构图。
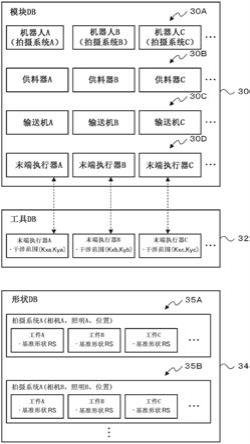
15.图4是表示模块db30、工具db32、形状db34的一个例子的说明图。
16.图5是表示干涉范围(kx,ky)的一个例子的说明图。
17.图6是表示基准形状rs的一个例子的说明图。
18.图7是表示工具数据登记处理的一个例子的流程图。
19.图8是表示形状数据登记处理的一个例子的流程图。
20.图9是表示数据提供处理的一个例子的流程图。
21.图10是表示选择输入画面59a的一个例子的说明图。
具体实施方式
22.接下来,参照附图对用于实施本公开的形态进行说明。
23.图1是表示本实施方式的设备导入支援系统10的结构的概略的结构图,图2是表示市场平台mp的概略的说明图,图3是表示作业系统60的结构的概略的结构图。如图1、图2所示,设备导入支援系统10具备对用于顾客(利用者)购入由供应商提供的各种设备和机器(以下,模块)的市场平台mp进行管理的管理服务器20。在该设备导入支援系统10中,管理服务器20通过网络12而与供应商终端40和顾客终端50连接。另外,在图1中,分别各示出一个供应商终端40、顾客终端50,但实际上连接有多个。
24.管理服务器20具备:控制部21、模拟部22、存储部23及通信部26。控制部21具有cpu、rom、ram等,进行市场平台mp的管理等的服务器整体的控制。模拟部22在假想空间上构建组合有能够在市场平台mp购入的模块的作业系统60(参照图3)等的模型md(数字孪生,参照图2),在假想空间上执行使用了模型md的模拟。存储部23由hdd等构成,存储各种应用程序和各种数据库(db)等。通信部26与网络12等连接,与供应商终端40和顾客终端50等进行通信。从键盘或鼠标等输入部28对管理服务器20输入基于管理者的各种指示等。另外,管理服务器20在显示器等显示部29上显示各种信息。另外,不限于管理服务器20具备模拟部22和存储部23(各种db),模拟部也可以作为能够与管理服务器20进行通信的其他装置而构成,存储各种db的数据服务器也可以作为能够与管理服务器20进行通信的其他装置而构成。
25.供应商终端40具备:具有cpu、rom、ram等的控制部41、存储各种应用程序和各种数据等的hdd等存储部43、与网络12等连接而与管理服务器20等进行通信的通信部46。供应商终端40从键盘或鼠标等输入部48被输入基于供应商的各种指示等。另外,供应商终端40在显示器等显示部49显示用于将提供对象的模块的模块数据等各种数据登记于市场平台mp的登记用画面等各种信息。
26.与供应商终端40相同地,顾客终端50具备:控制部51、存储部53及通信部56。另外,也可以是,通信部56通过网络12等而与后述的作业系统60的控制装置68进行通信。顾客终端50从键盘或鼠标等输入部58被输入基于顾客的各种指示等。另外,顾客终端50在显示器等显示部59显示市场平台mp的首页画面(购入用画面)、模拟的模型md、模拟的执行结果等
各种信息。
27.在此,对将能够在市场平台mp购入的模块组合而得到的作业系统(生产设备)60的一个例子进行说明。例如,作业系统60能够构成为通过机器人61进行预定作业的系统,在图3的例子中,除了机器人61以外,还具备基板输送装置66和供料器67。作为预定作业的一个例子,例如可举出:机器人61拾取机械元件或电子元件等工件并向基板s安装的安装作业等。机器人61具备垂直多关节型的机器人臂62和控制包括机器人臂62的工作在内的系统整体的控制装置68。另外,在机器人臂62的前端连杆除了以可拆装的方式安装有作为作业工具的末端执行器63以外,还安装有拍摄图像的相机64和与相机64同轴地配置的环形灯等照明65。另外,作为末端执行器63,可举出电磁卡盘、机械卡盘、吸嘴等。基板输送装置66通过一对传送带输送基板s。供料器67搜成为送出以预定间隔收纳有多个工件的带的带式供料器。另外,供料器67不限于带式供料器,也可以是供给配置有多个工件的托盘的托盘供料器等。控制装置68由cpu、rom、hdd、ram等构成,除了机器人61的动作程序以外,还存储管理作业系统60整体的系统程序等。另外,控制装置68在预定作业期间被输入由相机64拍摄到的工件的图像,并对该图像进行图像处理,来识别工件的位置和尺寸,或者确认了是否为正确的工件之后,选定要拾取的工件。控制装置68例如在构成为通过电磁卡盘或机械卡盘等卡盘拾取工件的情况下,根据图像来判定有无与成为对象的工件的周围的其他工件之间的干涉等,将没有干涉的工件选定为拾取的对象。另外,虽省略图示,但基板输送装置66的动作程序由基板输送装置66的plc(programmable logic controller:可编程逻辑控制器)存储,供料器67的动作程序由供料器67的plc存储。将构成这样的作业系统60的机器人61(机器人臂62)、末端执行器63、相机64、照明65、基板输送装置66、供料器67分别称为模块。
28.在管理服务器20的存储部23中存储有模块db(数据库)30、工具db32、形状db34、供应商db37及顾客db39。虽省略图示,但供应商db37登记有进行了认证登记的供应商的名称、各供应商所固有的供应商id、住址、邮件地址等联系方式、供应商提供的模块的种类的信息等。另外,虽省略图示,但顾客db39登记有进行了认证登记的顾客的名称、各顾客所固有的顾客id、住址、邮件地址等联系方式、顾客的购入历史等。
29.在此,图4是表示模块db30、工具db32、形状db34的一个例子的说明图。模块db30对供应商从供应商终端40通过登记用画面而登记的模块数据等进行登记。在模块db30中登记有机器人数据30a、供料器数据30b、输送机数据30c、末端执行器数据30d等按每个模块的种类区分的多个模块数据。另外,虽省略图示,但也登记有相机和照明的数据。各模块数据包括各模块的三维cad数据等形状数据、若为能够动作的模块则包括其动作程序、若为包括相机或照明等的拍摄系统则包括包含透镜的种类等的相机规格、照明规格等的拍摄系统的信息、各种连接所需的连接器的信息、规格等。在图4中,例如,按标准安装于机器人a的拍摄系统a的信息包含于机器人a的模块数据。相同地,拍摄系统b的信息包含于机器人b的模块数据,拍摄系统c的信息包含于机器人c的模块数据。另外,虽省略图示,但在模块db30中也登记有包含作业对象的代表性的工件的形状数据和物性数据等的模块数据等。工件的模块数据也可以登记有供应商,也可以登记有从顾客接受了委托的管理者,在使用了模型md的模拟中使用。
30.在工具db32中登记有表示用于判定在电磁卡盘或机械卡盘等末端执行器63卡紧工件时有无与周围其他工件等干涉的干涉范围的工具数据。图5是表示干涉范围(kx,ky)的
一个例子的说明图。在图5中,例示出末端执行器63具备能够进行开闭动作的一对卡盘爪63a的情况。另外,图5的(a)从侧方示出卡盘爪63a把持工件a的状况,图5的(b)从上方示出卡盘爪63a把持工件a的状况。如图示那样,一对卡盘爪63a通过开闭动作而变化为打开状态(参照实线)和闭合状态(虚线参照),在闭合状态下把持工件。另外,干涉范围作为打开状态下的卡盘爪63a不与周围干涉的范围,例如由卡盘爪63a的开闭方向上的值kx和在水平面内与开闭方向正交的预定方向上的值ky决定。值kx是在基于卡盘爪63a的开闭行程量和卡盘爪63a的开闭方向上的宽度(厚度)的打开状态的两卡盘爪63a的外尺寸考虑到卡盘爪63a的尺寸的个体差、机器人把持工件时的末端执行器63的位置精度等而加上了数mm左右的余量所得到的值。值ky是在卡盘爪63a的预定方向上的宽度与上述相同地加上了数mm左右的余量所得到的值。各工具数据按每个末端执行器63的种类来决定,与末端执行器63的种类建立对应地登记于工具db32。例如,与末端执行器a建立对应地登记有干涉范围(kxa,kya),与末端执行器b建立对应地登记有干涉范围(kxb,kyb),与末端执行器c建立对应地登记有干涉范围(kxc,kyc)。另外,工具数据的干涉范围(kx,ky)不限于仅登记值,还可以登记在图像内由框示出的范围。
31.在形状db34中登记有通过作业系统60的控制装置68等进行工件的图像处理时成为该工件的形状的基准的形状数据。在本实施方式中,根据各拍摄系统分别拍摄了工件而得到的图像,设定在图像处理中成为工件的形状的基准的基准形状rs,并作为形状数据而登记于形状db34。因此,由拍摄系统a拍摄到的各工件的形状数据作为拍摄系统a用数据35a而登记有多个,由拍摄系统b拍摄到的各工件的形状数据作为拍摄系统b用数据35b而登记有多个。另外,图6是表示基准形状rs的一个例子的说明图。如图示那样,拍摄系统a的工件a的基准形状rs是以比由虚线示出的本来的工件形状稍靠外侧的轮廓线为基准的数据。另一方面,拍摄系统b的工件a的基准形状rs是以比由虚线示出的本来的工件形状稍靠内侧的轮廓线为基准的数据。在此,当根据例如包含透镜的相机64的规格、照明65的规格、相机64、照明65的配置位置等的不同而拍摄系统不同时,即便拍摄相同的工件,图像内的工件的映现状况也变化,有时图像内的工件的尺寸和形状等产生不同。在本实施方式中,如后述那样,为了适当地抑制这样的不同对图像处理带来的影响,按每个拍摄系统将表示工件的基准形状rs的形状数据登记于形状db34。另外,在各形状数据中还登记有拍摄系统的像素分辨率(mm/像素)。
32.在显示于顾客终端50等的市场平台mp的首页画面中,能够进行这些模块的购入请求、阅览、各种数据的提供请求、各种应用工具的购入请求、阅览、顾客向我的页面的登录等。如图2所示,在首页画面中,显示有例如表示机器人、末端执行器、供料器、输送机的模块的各模块的按种类的图标、数据请求的图标、应用工具选择的图标、购入按钮、向我的页面的登录按钮等。当顾客通过使用了输入部58的操作输入而操作(点击)购入按钮之后选择了所希望的模块的图标时,显示能够选择对应种类的模块数据地一览显示的未图示的模块选择画面。例如,当顾客选择了机器人的图标时,一览显示各机器人的模块数据31,顾客能够从其中选择并购入所需要的模块。另外,一览显示的模块数据登记于模块db30。另外,当顾客操作购入按钮之后选择了应用工具的图标时,显示能够选择各种应用工具地一览显示的未图示的应用工具选择画面。顾客能够从其中选择并购入所需的应用工具。另外,作为各种应用工具,可举出收集各模块的作业状况或异常产生的频次等信息并进行分析的分析工
具、根据分析结果提出模块的变更等改善方案的提出工具、进行模块的高效的布局的布局工具等。另外,顾客能够不点击购入按钮而选择模块的图标、应用工具的图标,阅览一览显示的模块、应用工具的内容。另外,当顾客登录了我的页面时,能够确认模块的购入历史、导入预定的模块的内容及变更历史、管理服务器20、来自供应商的连络事项等。
33.接下来,对这样构成的设备导入支援系统10的处理,特别是与工具数据、形状数据相关的处理进行说明。首先,对在工具db32、形状db34登记工具数据、形状数据的处理进行说明。
34.图7是表示工具数据登记处理的一个例子的流程图。该处理在例如通过供应商登记工具数据的情况下由控制部21执行。在工具数据登记处理中,控制部21首先通过显示于供应商终端40的显示部49的未图示的登记用画面,接受卡盘爪63a的尺寸和开闭行程量(s100)。另外,控制部21不限于从供应商终端40接受信息,也可以从登记于模块db30的末端执行器数据30d的规格信息取得所需的信息。
35.接下来,控制部21求出在基于卡盘爪63a的开闭行程量和卡盘爪63a的开闭方向上的宽度(厚度)的打开状态的两卡盘爪63a的外尺寸加上了余量而得到的值kx和在卡盘爪63a的预定方向上的宽度加上了余量而得到的值ky来设定干涉范围(kx,ky)(s110)。另外,控制部21也可以接受打开状态下的两卡盘爪63a的外尺寸的信息而求出值kx等。并且,控制部21将在s110中设定出的干涉范围(kx,ky)作为与末端执行器63的种类建立了对应的工具数据而登记于工具db32(s120),并使工具数据登记处理结束。
36.图8是表示形状数据登记处理的一个例子的流程图。该处理除了在通过供应商登记有形状数据的情况下由控制部21执行之外,还在通过顾客登记有形状数据的情况下由控制部21执行。另外,形状数据登记处理通过显示于供应商终端40的显示部49或顾客终端50的显示部59的未图示的登记用画面来进行。在该形状数据登记处理中,控制部21首先判定形状数据的登记对象的拍摄系统是否为未登记的拍摄系统(s200)。1若为未登记的拍摄系统,则控制部2接受拍摄系统的信息并将新的拍摄系统登记于形状db34(s210),并进入s230。例如,控制部21接受相机64的规格、照明65的规格、相机64和照明65的配置位置等信息,并与表示拍摄系统的种类的信息一起登记。另外,若为已经登记完毕的拍摄系统,则控制部21接受登记对象的拍摄系统的选择(s220),并进入s230。
37.接下来,控制部21接受登记对象的工件的种类和该工件的图像(s230)。控制部21在s230中,接受由作业系统60的拍摄系统实际拍摄到的工件的图像。接着,控制部21对接受到的图像进行图像处理而生成表示图像内的工件的轮廓的形状数据(s240)。例如,控制部21提取多个图像内的工件的边缘,并将提取出的各边缘圆滑地连接而成的轮廓线生成为形状数据。并且,控制部21将与在s210中登记的拍摄系统或者在s220中选择出的拍摄系统和工件的种类建立了对应的形状数据登记于形状db34(s250),并使形状数据登记处理结束。例如若拍摄系统a为对象,则控制部21作为形状db34的拍摄系统a用数据35a而登记新的工件的形状数据。
38.接着,说明对向顾客提供来自工具db32或形状db34的各数据进行处理。图9是表示数据提供处理的一个例子的流程图。该处理在从显示于顾客终端50的显示部59的市场平台mp的首页画面选择了各种数据的提供请求的情况下由控制部21执行。在数据提供处理中,控制部21首先判定是否在未图示的请求数据选择画面中由顾客选择了工具数据(s300),当
判定为没有选择工具数据时,进入s330。另一方面,控制部21当判定为在s300中选择了工具数据时,通过未图示的工具数据的选择输入画面而接受末端执行器63的种类的选择输入(s310),从工具db32选择与接受到的末端执行器63的种类对应的工具数据并下载到顾客终端50(s320)。例如,控制部21在作为末端执行器63的种类而接受到末端执行器a的选择输入的情况下,将末端执行器a的工具数据即干涉范围(kxa,kya)下载到顾客终端50。另外,也可以是,控制部21使干涉范围(kx,ky)成为根据顾客的作业系统60的拍摄系统的像素分辨率而自动转换后的图像数据,而下载到顾客终端50。这样一来,顾客的作业系统60的控制装置68例如在卡紧工件时的图像处理中,能够使下载的图像数据反映于图像内来进行有无与工件的周围干涉的确认。即,控制装置68不需要生成对干涉范围(kx,ky)进行了转换的图像数据,因此,能够省去生成的麻烦。当然,控制装置68也可以根据作业系统60的拍摄系统的像素分辨率来转换下载的干涉范围(kx,ky)。
39.接下来,控制部21判定是否在请求数据选择画面中由顾客选择了形状数据(s330),当判定为没有选择形状数据时,结束数据提供处理。另一方面,控制部21当判定为在s330中选择了形状数据时,在显示部59显示选择输入画面59a,并从顾客接受拍摄系统及工件的种类的选择输入(s340)。图10是表示选择输入画面59a的一个例子的说明图。在该选择输入画面59a中,控制部21首先显示多个拍摄系统的按钮图像,并通过使用了输入部58的操作(点击)由顾客接受拍摄系统的种类的选择输入(参照图10a)。当由顾客接受了拍摄系统的选择输入时,控制部21对对该拍摄系统登记的多个工件的按钮图像进行显示,并通过使用了输入部58的操作(点击)而接受工件的种类的选择输入(参照图10b)。另外,图10b示出在图10a中接受了拍摄系统a的选择输入的情况下的画面。另外,当在图10a中操作了返回按钮时返回请求数据选择画面,当在图10b中操作了返回按钮时返回图10a。另外,在工具数据的选择输入画面中,多个末端执行器63(末端执行器a、b、c)的按钮图像与图10相同地以能够选择输入的方式显示。
40.控制部21当这样接受了拍摄系统及工件的种类的选择输入时,从形状db34选择与接受到的拍摄系统及工件的种类对应的形状数据并下载到顾客终端50(s350),并结束数据提供处理。将下载到顾客终端50的工具数据和形状数据向作业系统60的控制装置68转送,并在控制装置68的图像处理中利用。另外,在本实施方式中,例示了依次进行工具数据的选择、拍摄系统的选择、工件的选择的情况,但不限于该顺序,也可以按不同的顺序进行。另外,根据形状数据的登记状况不同,有时没有登记有顾客所希望的形状数据。因此,控制部21也可以显示如下的意思:例如显示于图10b的选择输入画面59a的是登记完毕的拍摄系统、工件,关于没有显示的拍摄系统、工件,无法接受选择输入。另外,在该情况下,顾客需要自己生成形状数据,但能够通过上述的形状数据登记处理随时登记形状数据并利用,因此,能够抑制需要形状数据的生成的情况多发。
41.在此,如上述那样,若拍摄系统不同则有时即便拍摄相同的工件,图像内的工件的尺寸或形状等也产生不同。例如,在图6所例示的工件中,若不仅根据拍摄系统而映现于图像的尺寸不同,而且光的反射状况不同或者图像的对比度等不同,则有时映现于图像的边缘的边界比虚线所示的本来的工件形状靠外侧或者内侧。因此,若在由不同的拍摄系统拍摄到的相同的种类的工件的图像处理中应用共用的基准形状,则有时不仅产生尺寸转换的麻烦,还产生识别错误或确认错误等不良状况。在本实施方式中,即使是相同种类的工件也
按每个拍摄系统表示工件的基准形状rs的形状数据登记于形状db34,顾客能够将形状数据下载到顾客终端50。因此,控制装置68能够使用与作业系统60的拍摄系统对应的形状数据(基准形状rs)而适当地进行图像处理。另外,在不需要生成与导入的拍摄系统对应的形状数据的情况下,顾客能够缩短准备形状数据的时间。另外,在本实施方式中,按每个末端执行器63的种类将表示卡盘爪63a等的干涉范围(kx,ky)的工具数据登记于工具db32,顾客能够将工具数据下载到顾客终端50。
42.在此,明确本实施方式的结构要素与本公开的结构要素的对应关系。包含本实施方式的市场平台mp的设备导入支援系统10相当于市场系统,管理服务器20的存储部23相当于存储部,执行数据提供处理的管理服务器20的控制部21相当于提供部。执行形状数据登记处理的管理服务器20的控制部21相当于登记部。
43.以上说明的设备导入支援系统10将多个形状数据与拍摄系统及工件的种类建立对应地存储于存储部23(形状db34),上述多个形状数据是按照每个拍摄系统而根据对工件拍摄到的图像所生成的并通过图像处理成为工件的基准形状rs。另外,能够将形状数据提供(下载)给顾客终端50。因此,能够缩短顾客准备形状数据的时间而减少生成负担。另外,能够使用与拍摄系统对应的形状数据而适当地进行图像处理。
44.另外,设备导入支援系统10将表示卡盘爪63a的干涉范围(kx,ky)的工具数据与末端执行器63的种类建立对应地存储于存储部23(工具db32)。因此,能够省去顾客设定工具数据的麻烦,因此,能够进一步减少图像处理所需的数据的生成负担。另外,能够防止顾客错误设定工具数据。另外,顾客能够从市场平台mp取得形状数据和工具数据。因此,顾客能够不检索其他网站而容易地取得在市场平台mp购入的模块的数据。
45.另外,顾客通过在选择输入画面59a选择拍摄系统及工件的种类,能够请求所需的形状数据,因此,能够不分别输入拍摄系统及工件的种类的信息而容易地取得数据。
46.另外,设备导入支援系统10在形状数据登记处理中,不仅从供应商还从顾客接受工件的图像,并根据该图像生成形状数据并登记于存储部23(形状db34)。因此,即便在某个拍摄系统的工件的形状数据没有登记于形状db34的情况下,也能够根据由该拍摄系统拍摄了工件得到的图像而随时登记新的形状数据。因此,能够使存积于形状db34的形状数据充实,并且能够在顾客之间有效地利用形状数据。
47.另外,本公开没有被上述的实施方式作任何限定,只要属于本公开的技术范围则能够以各种方式实施,这是不言而喻的。
48.例如,在上述的实施方式中,能够在形状数据登记处理中从顾客接受工件的图像并登记形状数据,但不限于此,也可以仅接受来自供应商的图像并登记形状数据。
49.在上述的实施方式中,顾客通过在选择输入画面59a选择拍摄系统及工件的种类,而请求所需的形状数据,但不限于此,也可以是,顾客通过分别输入拍摄系统及工件的种类的信息,来请求所需的形状数据。或者,不限于从顾客接受输出对象的数据的选择并将接受到的数据通过网络而提供给顾客,也可以自动向顾客提供登记于顾客的作业系统60的拍摄系统的工件的形状数据。在这样的情况下,也可以是,每当通过形状数据登记处理登记了新的工件的形状数据时,对具备相同的拍摄系统的机器人61的顾客提供新的形状数据。另外,也可以是,针对工具数据,也在顾客购入(导入)末端执行器63时等自动地向顾客提供该末端执行器63的工具数据。
50.在上述的实施方式中,存储部23具备工具db32和形状db34,并存储工具数据和形状数据,但不限于此,存储部23不具备工具db32而没有存储工具数据等,存储部23具有形状db34并存储形状数据即可。在这样的情况下,顾客设定干涉范围等即可。另外,例如,在使用吸嘴作为末端执行器63的情况下,吸嘴处于元件的吸附面内,因此,不需要工具数据。另外,在基板s的检查装置等对基板s上的元件的安装状态进行检查的情况下,不需要通过图像处理来判定干涉,因此,不需要工具数据。
51.在上述的实施方式中,针对按标准安装于机器人61的每个拍摄系统登记有形状数据,但不限于此。例如,也可以是,登记有组合能够安装于机器人61的相机64和照明65而成的拍摄系统的形状数据。另外,例如,在顾客能够自由选择拍摄系统而导入的情况下,通过选择登记有更多生产预定的工件的形状数据的拍摄系统,能够抑制图像处理所需的数据的生成负担。因此,顾客能够将形状db34的每个拍摄系统的形状数据的登记数作为导入拍摄系统时的判断材料。
52.在上述的实施方式中,例示出由多个模块构成的作业系统60,但不限于此,作业系统伴随着由拍摄系统拍摄到的工件的图像处理而进行生产即可,也可以是通过按标准安装有相机64或照明65等的机器人61等一个模块构成的系统。或者,也可以是通过输送机等输送物品的模块和拍摄系统构成的系统等。另外,作为拍摄系统,例示出在机器人61的机器人臂62的前端连杆安装的相机64和照明65,但不限于此。例如,拍摄系统也可以安装于机器人61的上方的顶棚等,也可以安装于以横跨基板输送装置66的输送机的方式配置的门型的框架。
53.在上述的实施方式中,例示出不仅包含市场平台mp的管理还包含模拟部22的设备导入支援系统10,但不限于此,成为不包含模拟部22且对能够通过网络而交易与生产设备相关的商品的市场平台mp进行管理的系统即可。另外,作为商品,例示出模块和应用工具,但不限于能够购入这两方的系统,也可以仅能够购入一方的系统。
54.在此,本公开的市场系统也可以如以下那样构成。例如,在本公开的市场系统中,也可以是,上述生产设备存在使用能够进行开闭的工具来把持上述工件的结构,上述存储部将表示用于判定上述工具把持上述工件时有无与周围的干涉的范围的工具数据与上述工具的种类建立对应地存储。这样,能够省去系统的利用者设定工具数据的麻烦,因此,能够进一步减少图像处理所需的数据的生成负担。
55.在本公开的市场系统中,也可以是,上述提供部从顾客接受上述拍摄系统及上述工件的种类的选择输入,并将与该选择输入对应的上述形状数据提供给顾客。这样,顾客通过选择生产设备的拍摄系统及生产对象的工件的种类,能够容易地取得所需的形状数据。
56.在本公开的市场系统中,也可以是,上述具备登记部,上述登记部通过上述网络从顾客接受由上述生产设备的拍摄系统拍摄到的上述工件的图像,并根据该接受到的图像生成上述形状数据而登记于上述存储部。这样,能够登记新的形状数据,因此,能够在顾客之间有效利用形状数据。
57.产业上的可利用性
58.本公开能够在能够通过网络交易与生产设备相关的商品的市场系统的技术领域等中利用。
59.附图标记说明
60.10...设备导入支援系统;12...网络;20...管理服务器;21、41、51...控制部;22...模拟部;23、43、53...存储部;26、46、56...通信部;28、48、58...输入部;29、49、59...显示部;30...模块db;30a...机器人数据;30b...供料器数据;30c...输送机数据;30d...末端执行器数据;32...工具db;34...形状db;35a...拍摄系统a用数据;35b...拍摄系统b用数据;37...供应商db;39...顾客db;40...供应商终端;50...顾客终端;59a...选择输入画面;60...作业系统;61...机器人;62...机器人臂;63...末端执行器;63a...卡盘爪;64...相机;65...照明;66...基板输送装置;67...供料器;68...控制装置;md...模型;mp...市场平台;rs...基准形状;s...基板。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1