体感触觉装置的制作方法
1.本发明属于智能设备技术领域,尤其涉及一种体感触觉装置。
背景技术:
2.触觉是人类与外界环境交流的重要感觉之一,体感触觉装置旨在帮助人类或者机器人有触摸物体的真实感。如在vr场景中,体验者可以利用视觉感受虚拟现实的交互,但用户缺乏沉浸感。而体感触觉装置可以帮助体验者在触摸到虚拟物体的时候产生相应的触觉感受,增加体验沉浸感。
3.现阶段让人体产生触感的方式主要有电刺激方式和机械刺激方式,其中,前者是通过电流脉冲刺激皮肤以达到刺激神经感觉纤维而产生体感刺激,具有装置复杂、操作安全性差、所产生的触觉类型局限且不可控;后者通过电或磁产生振动等对皮肤产生刺激,其触感局限于振动,振动感触觉不够细腻,能够模拟的触感也十分有限。
技术实现要素:
4.有鉴于此,本发明实施例提供了一种体感触觉装置,其包括柔性电路板、ipmc弹性层、应变弹性层,所述柔性电路板设在所述ipmc弹性层和所述应变弹性层之间,所述ipmc弹性层包括多个ipmc结构。
5.进一步地,所述应变弹性层内设有至少一个应变片。
6.进一步地,所述应变弹性层包括第一弹性体,所述至少一个应变片设在所述第一弹性体内。
7.进一步地,所述ipmc弹性层包括第二弹性体,所述多个ipmc结构设在所述第二弹性体背离所述柔性电路板一面。
8.进一步地,还包括柔性防水层,所述柔性防水层设在所述第二弹性体背离所述柔性电路板一面,并将所述多个ipmc结构覆盖。
9.进一步地,所述柔性防水层的制作材料包括硅胶。
10.进一步地,在每一个ipmc结构的外表面覆盖一层防水层。
11.进一步地,每一个所述ipmc结构部分固定于所述第二弹性体。
12.进一步地,根据所述ipmc结构上实际的压力数据和应施加在所述ipmc结构上的期望压力数据,调整所述ipmc结构的弯曲程度。
13.进一步地,由所述应变片获取所述ipmc结构上实际的压力数据。
14.进一步地,通过机器学习获得应施加在所述ipmc结构上的期望压力数据。
15.本发明实施例提供了一种新型的体感触觉装置,将ipmc结构与触觉传感技术结合,使得体感触觉的精度更高,提升体感触觉装置的使用体验。
附图说明
16.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现
有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
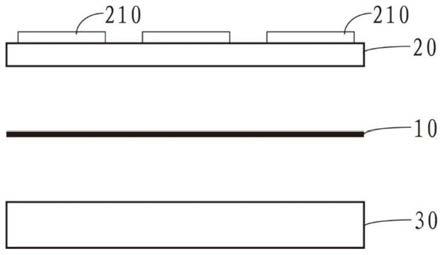
18.图1为本发明第一实施例提供的一种体感触觉装置的一剖面结构爆炸示意图;
19.图2为本发明第一实施例提供的一种体感触觉装置的又一剖面结构爆炸示意图;
20.图3为本发明第一实施例提供的一种体感触觉装置的一结构控制框图;
21.图4为本发明第一实施例提供的一种体感触觉装置的ipmc结构的一立体结构示意图;
22.图5为本发明第一实施例提供的一种体感触觉装置的又一剖面结构爆炸示意图;
23.图6为本发明第二实施例提供的一种体感触觉控制方法的一方法流程图;
24.图7为本发明第二实施例提供的一种体感触觉控制方法的又一方法流程图;
25.图8为本发明第二实施例提供的一种体感触觉控制方法的又一方法流程图。
具体实施方式
26.以下将配合附图及实施例来详细说明本发明的实施方式,藉此对本发明如何应用技术手段来解决技术问题并达成技术功效的实现过程能充分理解并据以实施。
27.如在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可理解,硬件制造商可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名称的差异来作为区分组件的方式,而是以组件在功能上的差异来作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”为一开放式用语,故应解释成“包含但不限定于”。“大致”是指在可接收的误差范围内,本领域技术人员能够在一定误差范围内解决所述技术问题,基本达到所述技术效果。此外,“耦接”或“电性连接”一词在此包含任何直接及间接的电性耦接手段。因此,若文中描述一第一装置耦接于一第二装置,则代表所述第一装置可直接电性耦接于所述第二装置,或通过其它装置或耦接手段间接地电性耦接至所述第二装置。说明书后续描述为实施本发明的较佳实施方式,然所述描述乃以说明本发明的一般原则为目的,并非用以限定本发明的范围。本发明的保护范围当视所附权利要求所界定者为准。
28.还需要说明的是,术语“包括”、“包含”或者其任何其它变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者系统不仅包括那些要素,而且还包括没有明确列出的其它要素,或者是还包括为这种过程、方法、商品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、商品或者系统中还存在另外的相同要素。
29.具体实施例
30.目前,市场上的体感触觉装置主要是从外部作用人体的触觉刺激,这里的外部刺激主要分为两种,一种是电刺激方式,另一种是机械刺激方式(触觉体感激励)。前者是指用电流脉冲刺激皮肤以达到刺激神经感觉纤维而产生体感刺激,这种方式一般对设备性能要求高、价格贵、装置复杂、操作安全性不高、产生触感不可控,且产生的触感的种类有局限
性。触觉激励是通过电或磁产生振动等对皮肤(手指)产生刺激,该方式安全性较高,不需要成套的专业设备,可接受和推广的程度更高。
31.电活性聚合物材料(electro active polymer,eap)是一种能在激励信号的作用下产生较大的尺寸和形状变化的新型柔性驱动材料。离子聚合物金属复合材料(ionic polymer-metal composites,ipmc)是eap材料最有代表性的一种,它是一种在聚合物薄膜表面还原沉积金属电极的复合材料。ipmc由于其在电能与机械能的转换过程中效率高,较低的驱动电压能产生较大的形变量,同时具有机械装置所不具有的柔性、快速响应、生物相容性等优点,逐渐被用于机器人的新型执行器。ipmc因其质量轻体积小、无噪声、响应快等优点,在机器人领域得到了较广泛的应用,现阶段主要应用是作为人工肌肉模拟人体肌肉收缩用于假肢的研发,另外作为机械手的手爪进行抓取、用于机器鱼的背鳍和尾鳍进行摆动、用于医学领域的胶囊机器人进行推进运动等方面,而在产生触觉这一领域,还没有相关的应用。
32.本发明实施例主要是提供一种体感触觉装置及其控制方法,其中,该体感触觉装置是利用ipmc的电能与机械能转换过程的高效率,在较低的驱动电压下能产生较大的形变量,具有小型轻量、功能集中、可产生连续力的变化,因此,本发明利用ipmc的上述特性将其应用在人类未与物体发生接触时对触感的模拟。
33.第一实施例
34.请参考图1,为本发明第一实施例提供的一种体感触觉装置的一剖面结构爆炸示意图,其中,所述体感触觉装置包括柔性电路板10、ipmc弹性层20以及应变弹性层30,所述柔性电路板10设在所述ipmc弹性层20和所述应变弹性层30之间,所述ipmc弹性层20包括多个ipmc结构210。
35.在这里,所述柔性电路板10是以聚酰亚胺或聚脂薄膜为基材制成的印刷电路板,其具有配线密度高、质量轻、厚度薄以及弯折性好的优点,所述柔性电路板10夹设在所述ipmc弹性层20和所述应变弹性层30之间;所述ipmc弹性层20中的所述多个ipmc结构210在所述ipmc弹性层20上的排列方式可以根据实际情形进行设置,一般情况下所述多个ipmc结构210在所述ipmc弹性层20内阵列式排布,另外,ipmc结构的形状也可以根据实际情形选择,所述ipmc结构210与所述柔性电路板10电性连接,所述柔性电路板10还与外部电源之间电性连接,所述外部电源用于为所述柔性电路板10提供电能,通过所述柔性电路板10可以对所述ipmc结构210的厚度方向施加电压,此时所述ipmc结构210会发生形变,如发生一定量的弯曲,从而带动所述ipmc弹性层20发生相应形变,所述柔性电路板10、所述ipmc弹性层20以及所述应变弹性层30三者构成紧密层叠连接的三明治之势,由于三者都具有较好的弯折性能,所以任一结构出现弯曲变形将带动其他两结构发生形变,即所述ipmc弹性层20会带动所述柔性电路板10以及所述应变弹性层30跟着发生形变。
36.在实际使用时,与所述柔性电路板10电性连接的处理器或者控制器会向所述ipmc结构210发出致动指令,其中,所述处理器或者控制器可以是与柔性电路板10电性连接的外部处理器或控制器,也可以是集成在柔性电路板10上的处理器或控制器;所述ipmc结构210执行所述致动指令发生相应的形变,进而带动所述ipmc弹性层20发生形变,由于所述柔性电路板10、所述ipmc弹性层20以及所述应变弹性层30之间的层叠结构,所述柔性电路板10以及所述应变弹性层30也跟着发生形变,此时所述应变弹性层30会测得压力数据,处理器
或者控制器获得该压力数据后,将其与真实场景中触摸实物的期望压力数据进行比较,并根据比较结果调整所述致动指令,进而使得所述ipmc结构210执行调整后的所述致动指令发生相应的形变,重新带动所述ipmc弹性层20、所述柔性电路板10以及所述应变弹性层30产生形变,此时所述应变弹性层30再次测得压力数据,将压力数据再次与期望压力数据比较,并根据比较结果调整所述致动指令,直至再次测得的压力数据与真实场景中触摸实物的期望压力数据一致;在这里,根据以上压力数据比较结果调整所述致动指令具体可以是:若通过所述应变弹性层30测得压力数据大于期望压力数据,那此时就需要减小所述ipmc结构210的弯曲程度,此时可以调整所述致动指令减小致动幅度;相反,若通过所述应变弹性层30测得压力数据小于期望压力数据,那此时就需要加大所述ipmc结构210的弯曲程度,此时可以调整所述致动指令增大致动幅度;可以想到的是若通过所述应变弹性层30测得压力数据等于期望压力数据,那么所述ipmc结构210的弯曲程度刚刚好,则不需要对所述致动指令进行调整。
37.其中,通过体感触觉装置电性连接的传感器单元获取用户的运动数据、姿态数据等虚拟场景反应数据,将所述反应数据传送至所述处理器或控制器进行处理并结合机器学习获得真实场景中用户触摸实物的期望压力数据。
38.本实施例中,通过所述应变弹性层30的反馈,可调整所述致动指令,以使得所述ipmc结构210根据调整后的致动指令产生形变,并使得此时的压力与真实场景中触摸实物的压力保持一致,提高体感触觉的精度,使得体感触觉的类型更加丰富,提升了体感触觉装置的使用体验。
39.请结合图2,为本发明第一实施例提供的一种体感触觉装置的又一剖面结构爆炸示意图,在本发明实施例的其中一种较佳的实施方式中,所述应变弹性层30内设有至少一个应变片310。所述应变片310用于测得所述应变弹性层30在发生形变时的压力数据,即以上提到的所述应变弹性层30所测得的压力数据是由所述应变弹性层30内的至少一个所述应变片310测得的。
40.请参考图3,为本发明第一实施例提供的一种体感触觉装置的一结构控制框图,所述应变片310可以在使用所述体感触觉装置时具有一个闭环控制,对后续触觉的产生有更精准的控制,为实现精度更高、功能更全的触感,如感受虚拟物体的硬度、粗糙度等,甚至微风流水的感觉,提供了保障。如图3所示,
[0041][0042]
其中,表示触摸实物的真实触感(力),即触感的期望值,也可以理解为以上所述的标准压力数据,δf表示应变片所测的实际值与期望值之间的修正量,f表示所述应变片310实际测得的实际值。
[0043]
请结合图4,为本发明第一实施例提供的一种体感触觉装置的ipmc结构的一立体结构示意图,所述多个ipmc结构210均包括一个聚合物薄膜层2101和两个电极层2102,所述两个电极层2102分别设在所述聚合物薄膜层2101的相对两面。
[0044]
具体地,所述聚合物薄膜层2101位于中间层,上下两层分别为所述电极层2102,所述聚合物薄膜层2101内具有聚合物分子链、水分子以及阳离子,所述聚合物薄膜层在相同的电压驱动下,对不同离子的输出力及形变量是不同的,其中以"pt离子"和"na离子"的效果最为显著。实验表明,所述ipmc结构210表面电阻的大小与所述ipmc结构210的输出能力
有密切关系。当对所述ipmc结构210厚度方向,即所述两个电极层2102上施加电压时,所述ipmc结构210会产生较大的形变量,向阳极弯曲(直接现象)。相反,当所述ipmc结构210受到外力产生弯曲形变时,所述ipmc结构210也会在厚度方向产生电压(反现象),因此所述ipmc结构210是一个机电耦合系统。
[0045]
进一步地,为了保证所述ipmc结构210具有较好的导电性和稳定性,以及在一定程度上降低电极的厚度并使其弯折性能不受影响,这里所述电极层2102一般会选用贵金属材料,即所述两个电极层的制作材料包括铂、银、金的任意一种。
[0046]
另外,根据所述ipmc结构210上实际的压力数据和应施加在所述ipmc结构210上的期望压力数据,调整所述ipmc结构210的弯曲程度。具体地,当所述ipmc结构210发生形变时,会带动所述ipmc弹性层20发生形变,进而带动所述应变弹性层30发生相应的形变,此时所述应变弹性层30会测得相应的压力数据,即为所述ipmc结构210上实际的压力数据,此压力数据要和所述ipmc结构210上的期望压力数据进行比较,并根据比较结果来调整所述ipmc结构210的弯曲程度,对于如何根据所述比较结果来调整所述ipmc结构210的弯曲程度可参考以上实施例的描述,这里的所述ipmc结构210上的期望压力数据是指所述ipmc结构210达到期望的弯曲程度时所对应的压力数据,而当所述ipmc结构210达到期望的弯曲程度会使得所述体感触觉设备与使用者肌体接触时与真实场景中触摸实物的压力数据保持一致,提高体感触觉的精度,使得体感触觉的类型更加丰富,提升了体感触觉装置的使用体验。
[0047]
进一步地,本发明实施例的其中一种实施方式中,由所述应变片310获取所述ipmc结构210上实际的压力数据,具体地,所述ipmc结构210在弯曲变形时带动所述ipmc弹性层20弯曲变形,进而带动所述柔性电路板10以及所述应变弹性性30弯曲变形,而在所述应变弹性性30弯曲变形时其内部的所述应变片310会测得相应的压力数据,这个压力数据即所述ipmc结构210上实际的压力数据。
[0048]
另外,本发明实施例的另一种实施方式中,通过机器学习获得应施加在所述ipmc结构210上的期望压力数据。如上所述,应施加在所述ipmc结构210上的期望压力数据是指在真实场景中触摸实物的压力数据,所述期望压力数据是通过所述体感触觉设备的传感器单元获取在虚拟场景下使用者的运动数据、姿态数据等反应数据,然后由处理器对这些数据进行处理并根据机器学习获得所述反应数据触摸真实物体时的触觉压力数据,这里需要强调的是通过大量的机器学习,当有一虚拟场景下的反应数据输入时便会输出相应的所述反应数据触摸真实物体时的触觉压力数据。
[0049]
请结合图5,为本发明第一实施例提供的一种体感触觉装置的又一剖面结构爆炸示意图,所述应变弹性层30包括第一弹性体320,所述至少一个应变片310设在所述第一弹性体320内。
[0050]
具体地,所述应变弹性层30包括所述应变片310和所述第一弹性体320,所述第一弹性体320紧密连接在所述柔性电路板10背离所述ipmc弹性层20的一面,所述应变片310镶嵌于所述第一弹性体320内,当所述第一弹性体320发生形变时,所述应变片310也跟随形变,并测得形变时的压力数据。
[0051]
进一步地,所述体感触觉装置还包括基底层40,所述基底层40设在所述第一弹性体320背离所述柔性电路板10一面。
[0052]
具体地,所述基底层40为所述体感触觉装置的最底层,所述基底层40紧密的连接在所述第一弹性体320背离所述柔性电路板10一面,所述基底层40要为所述体感触觉装置的其他结构起到支撑的作用,因此所述基底层40需要有一定的硬度;同时,所述基底层40有一定的弯折性能。
[0053]
更进一步地,所述基底层40的制作材料包括阈值硬度的pvc材料,这里的所述pvc材料仅仅是事例性质,所述阈值硬度主要考虑到所述基底层40的支撑结构作用,其可以根据所述体感触觉装置的具体使用部位以及所需要的弯折性能选用不同硬度的材料。
[0054]
另外,请结合图5,所述ipmc弹性层20包括第二弹性体220,所述多个ipmc结构210设在所述第二弹性体220背离所述柔性电路板10一面。
[0055]
具体地,所述第二弹性体220紧密连接在所述柔性电路板10背离所述应变弹性层30一面,这里的所述第二弹性体220可以为所述多个ipmc结构210提供一个具有一定弹性的载板,使得所述多个ipmc结构210可以固定在所述第二弹性体220背离所述柔性电路板10一面,如此当所述ipmc结构210发生形变时可以带动所述第二弹性体220发生形变,进而带动整个所述ipmc弹性层20发生形变,并将所述形变传递至所述柔性电路板10,进而传递至所述应变弹性层30。
[0056]
在本发明其他较佳的实施例中,为了得到更好的触感,每一个所述ipmc结构210部分固定于所述第二弹性体220上,进而满足所述体感触觉装置在使用时的弯折需求。
[0057]
进一步地,所述体感触觉装置还包括柔性防水层50,所述柔性防水层50设在所述第二弹性体220背离所述柔性电路板10一面,并将所述多个ipmc结构210覆盖。
[0058]
具体地,所述柔性防水层50为所述体感触觉装置的最表层,紧密连接在所述多个ipmc结构210的上方,使得所述多个ipmc结构210夹设在所述柔性防水层50和所述第二弹性体220之间,所述ipmc结构210中的聚合物薄膜中具有大量的水分,在其通电致动的过程中水分子易流失,使得所述ipmc结构210脱水而影响其使用性能,而通过在所述ipmc结构210的表面设置所述柔性防水层50可以有效的防止水分流失,同时又可以保证所述ipmc结构210的弯折性能。
[0059]
更进一步地,所述柔性防水层50的制作材料硅胶,即所述柔性防水层50为硅胶层,这里的所述柔性防水层50使用硅胶材料仅仅是事例性质,所述硅胶层一般采用阈值厚度的硅胶材料制成,主要考虑到其不能影响所述ipmc结构210的弯曲形变性能,其可以根据所述体感触觉装置的具体使用部位以及所述ipmc结构210所需要的弯曲形变性能选用不同厚度的硅胶。
[0060]
另外,在本发明其他较佳的实施例中,为了防止所述ipmc结构210的水分流失,以提升其使用性能,在每一个所述ipmc结构210的外表面覆盖一层防水层(图中未示出)。在这里,每一个所述ipmc结构210的外表面均有一层所述防水层覆盖,如此设计可有效的防止所述ipmc结构210的聚合物薄膜中的水分子在通电致动的过程流失,避免所述ipmc结构210因脱水而影响其使用性能。
[0061]
第二实施例
[0062]
参考图6,其为本发明第二实施例提供的一种体感触觉控制方法的一方法流程图,其中所述体感触觉控制方法包括:
[0063]
步骤s200,控制器向ipmc弹性层中的ipmc结构发出致动指令;
[0064]
步骤s300,所述ipmc结构根据所述致动指令发生相应形变,并带动所述ipmc弹性层以及应变弹性层产生形变;
[0065]
步骤s400,所述应变弹性层中的应变片获取所述应变弹性层形变时的压力数据;
[0066]
步骤s500,所述控制器根据所述压力数据及期望的压力数据调整所述致动指令。
[0067]
具体地,在步骤s200中,所述控制器与所述ipmc弹性层中的ipmc结构发出致动指令,所述致动指令是指可以使所述ipmc结构产生运动的指令,这里的产生运动主要是发生弯曲变形,具体的致动指令可以是:如所述控制器控制体感触觉装置的供电电源向所述ipmc结构的两个电极施加对应大小的电压。
[0068]
承接上述步骤s200,在步骤s300中,所述ipmc结构在接到所述致动指令后会发生相应的弯曲变形,由于所述ipmc结构设在所述ipmc弹性层中,从而带动所述ipmc弹性层一起弯曲变形,由于所述ipmc弹性层和所述应变弹性层紧密层叠连接,也会带动所述应变弹性层一起弯曲变形,即所述ipmc结构执行所述致动指令带动所述ipmc弹性层以及所述应变弹性层一起产生形变。
[0069]
承接上述步骤s300,在步骤s400中,在所述应变弹性层产生形变的过程中,所述应变弹性层中的应变片会实时监测压力数据,这里的压力数据指的所述应变弹性层在发生形变时的内部压力数据,由于应变片的压力由ipmc结构的形变带来,其可以测量用户实际感受到的压力。
[0070]
承接上述步骤s400,在步骤s500中,所述应变片在获得所述压力数据之后,将所述压力数据传送至所述控制器,所述控制器在接收到所述压力数据后,会根据所述压力数据和期望的压力数据对所述致动指令进行调整,具体地,将所述压力数据与真实场景中触摸实物的标准压力数据进行比较,若通过所述应变片测得压力数据大于标准压力数据,那此时就需要减小所述ipmc结构的弯曲变形程度,此时可以调整所述致动指令减小致动幅度;相反,若通过所述应变片测得压力数据小于标准压力数据,那此时就需要加大所述ipmc结构的弯曲变形程度,此时可以调整所述致动指令增大致动幅度;可以想到的是若通过所述应变片测得压力数据等于标准压力数据,那么所述ipmc结构的弯曲变形程度刚刚好,则不需要对所述致动指令进行调整,本实施例中,通过所述应变片的反馈机制,测得施加给用户的实际压力数据,并根据实际压力数据调整所述致动指令,
[0071]
进一步地,请结合图7,为本发明第二实施例提供的一种体感触觉控制方法的又一方法流程图,本实施例是在以上方法实施例的基础上,所述体感触觉控制方法还包括:
[0072]
步骤s500,所述ipmc结构根据调整后的致动指令带动所述ipmc弹性层产生形变。
[0073]
具体地,通过以上实施例中的方法对所述致动指令进行调整之后,所述控制器将调整后的致动指令传送至所述ipmc结构,所述ipmc结构根据所述调整后的致动指令产生形变弯曲,并带动所述ipmc弹性层以及所述应变弹性层产生形变,以使得所述应变弹性层中的所述应变片测得的压力数据与真实场景中触摸实物的压力数据保持一致,提高体感触觉的精度,使得体感触觉的类型更加丰富,提升了体感触觉装置的使用体验。
[0074]
进一步地,请结合图8,为本发明第二实施例提供的一种体感触觉控制方法的又一方法流程图,本实施例是在以上方法实施例的基础上,在步骤s200控制器向ipmc弹性层中的ipmc结构发出致动指令之前,所述体感触觉控制方法还包括:
[0075]
步骤s100,所述控制器对虚拟场景中用户的反应数据进行处理结合机器学习获得
真实场景中用户的触觉数据,并生成所述致动指令。
[0076]
具体地,在步骤s100中,与所述体感触觉装置电性连接的传感器单元可以获取用户的运动数据、姿态数据等虚拟场景反应数据,并将所述反应数据传送至所述控制器进行处理,然后将处理结果结合机器学习获得真实场景中用户的触觉数据,所述控制器根据所获得的触觉数据生成所述致动指令。
[0077]
应用实施例
[0078]
本发明实施例中的体感触觉装置可用于vr场景下的可穿戴设备,具体的为包括但不限定于是衣服,或者是头盔,或者是手套等,在这里以手套为例进行本应用实施例的说明。
[0079]
本发明的体感触觉装置用于触觉手套指尖,使用者戴上所述手套,并触摸vr场景中的虚拟物体,此时位于手套中的传感器单元(如姿态传感器)获取vr场景下的使用者的手部运动数据、姿态数据等反应数据,此时控制器将获取的反应数据进行处理并根据机器学习获得该反应数据触摸真实物体时的触觉压力数据,这里需要强调的是通过大量的机器学习,当有一虚拟场景下的反应数据输入时便会输出相应的该反应数据触摸真实物体时的触觉压力数据,所述控制器根据所述触觉压力数据生成相应的致动指令,如控制所述体感触觉装置的电源对装置中的ipmc结构的厚度方向施加电压,进而ipmc结构会发生弯曲形变,进一步地带动ipmc弹性层发生弯曲形变,所述ipmc弹性层将弯曲形变传递至应变弹性层,致使所述应变弹性层也跟随其发生弯曲变形,此时所述应变弹性层内应变片会测得其弯曲形变时的压力数据,在所述应变片获得所述压力数据之后,所述控制器要将所述压力数据与真实场景中触摸实物的期望压力数据进行比较,这里的真实场景中触摸实物的期望压力是实时根据传感器单元(如姿态传感器)获取vr场景下的使用者的手部运动数据、姿态数据等反应数据计算获得的,当通过所述应变片测得压力数据大于期望压力数据,那此时就需要减小所述ipmc结构的弯曲变形程度,此时可以调整所述致动指令减小致动幅度;相反,若通过所述应变片测得压力数据小于期望压力数据,那此时就需要加大所述ipmc结构的弯曲变形程度,此时可以调整所述致动指令增大致动幅度;另外,若通过所述应变片测得压力数据等于期望压力数据,那么所述ipmc结构的弯曲变形程度刚刚好,则不需要对所述致动指令进行调整,当所述控制器根据所述应变片测得的压力数据对所述致动指令进行调整后,所述ipmc结构执行调整后的所述致动指令,带动所述ipmc弹性层再次发生弯曲形变,进而带动所述应变弹性层也再次发生形变,与此同时所述应变片再次对压力数据进行监测,以使得所述应变片测得的压力数据与真实场景中触摸实物的压力数据保持一致,提高体感触觉的精度,使得体感触觉的类型更加丰富,提升了体感触觉装置的使用体验。
[0080]
需要特别指出,在结构不相冲突的情况下,以上第一实施例的各个实施方式中提及的各部分的结构可相互组合,为避免重复,组合后获得的技术方案在此不再赘述,但组合后获得的技术方案也应属于本发明的保护范围;以及以上第二实施例的方法实施例是与第一实施例体感触觉装置的结构实施例相对应的体感触觉控制方法实施例,若两者中有不清楚之处可以相互参考。
[0081]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;
而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1