一种基于椭圆RHM的标签粒子多扩展目标跟踪方法
一种基于椭圆rhm的标签粒子多扩展目标跟踪方法
技术领域
1.本发明属于信息融合技术领域,具体涉及一种基于椭圆rhm的标签粒子多扩展目标跟踪方法。
背景技术:
2.目标跟踪是通过一系列滤波算法处理雷达和其他传感器获得的目标量测信息,以计算目标当前运动状态、目标数量及其扩展形状等。目标跟踪与现实生活密切相关,在日常生活中广泛应用,在民用领域和军事领域具有重要应用价值,做出了突出贡献。
3.在跟踪过程中,若每个时刻传感器的感知单元最多捕获到每个目标的一个测量值,将目标抽象为点目标,即点目标跟踪,是目标跟踪发展的基础。随着传感器分辨率的大幅度提高,高分辨率传感器收集目标量测时会捕捉到同一个目标产生的多个量测,这种在每个时刻产生多个量测的目标称为扩展目标(extended target,et)。扩展目标具有一定的形状,不能当作点目标进行处理。扩展目标因其特有的形状、大小以及运动方向等信息,在军用、民用领域具有重要的应用需求和现实意义,提出后迅速成为热点研究方向。
4.目前多目标跟踪方法主要分为两类:传统的基于数据关联的多目标跟踪方法以及基于随机有限集(random finite set,rfs)的多目标跟踪方法。在传统多目标跟踪方法中,通过数据关联将目标量测与目标一一对应,将多目标跟踪转化为单目标跟踪问题,不仅计算量大、效率低,当目标数目较多时很传统方法很可能产生组合爆炸的情况。基于rfs的多目标跟踪方法将多目标状态以及量测分别建模为随机有限集,并且集合内的元素无序,元素数目随机,避免了数据关联,促进了多目标跟踪算法的迅速发展。对于扩展目标,可以用椭圆随机超曲面模型(random hypersurface model,rhm)将其建模为椭圆形状,但是目前基于椭圆rhm的多扩展目标无法实现航迹跟踪。
技术实现要素:
5.为了解决现有技术中存在的上述问题,本发明提供了一种基于椭圆rhm的标签粒子多扩展目标跟踪方法。本发明要解决的技术问题通过以下技术方案实现:
6.本发明提供了一种基于椭圆rhm的标签粒子多扩展目标跟踪方法,包括:
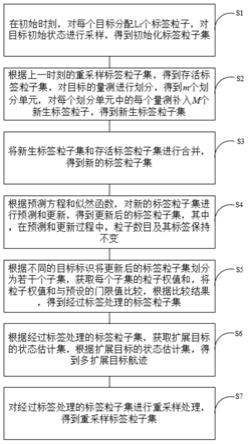
7.s1:在初始时刻,对每个目标分配l0个标签粒子,对所述目标进行初始状态采样,得到初始化标签粒子集;
8.所述初始化标签粒子集为:
[0009][0010][0011]
其中,表示初始时刻第i个粒子的状态向量,表示初始时刻第i个粒子的权
值,表示初始时刻第i个粒子的粒子标签,θ0表示初始时刻的标签集,θ
n
表示目标标识,n0表示初始时刻存在的目标数目;
[0012]
s2:根据上一时刻的重采样标签粒子集,得到存活标签粒子集,对所述目标的量测进行划分,得到m个划分单元,对每个划分单元中的每个量测补入m个新生标签粒子,得到新生标签粒子集,其中,对同一划分单元中的量测采样的粒子分配相同的标签,对不同划分单元中的量测采样的粒子分配不同的标签;
[0013]
s3:将所述新生标签粒子集和所述存活标签粒子集进行合并,得到新的标签粒子集;
[0014]
s4:根据预测方程和似然函数,对所述新的标签粒子集进行预测和更新,得到更新后的标签粒子集,其中,在预测和更新过程中,粒子数目及其标签保持不变;
[0015]
s5:根据不同的目标标识将所述更新后的标签粒子集划分为若干个子集,获取每个子集的粒子权值和,将所述粒子权值和与预设的门限值比较,根据比较结果,得到经过标签处理的标签粒子集;
[0016]
s6:根据所述经过标签处理的标签粒子集,获取扩展目标的状态估计集,根据所述扩展目标的状态估计集,得到多扩展目标航迹;
[0017]
s7:对所述经过标签处理的标签粒子集进行重采样处理,得到重采样标签粒子集。
[0018]
在本发明的一个实施例中,在所述步骤s1中,对所述目标进行状态采样,包括对所述目标的质心运动参数[m
xk m
yk v
xk v
yk
]
t
和形状参数[a
k
,b
k
,φ
k
]同时进行随机采样,其中,
[0019]
[m
xk m
yk v
xk v
yk
]
t
为k时刻的质心运动参数,m
xk
,m
yk
分别表示k时刻质心在x,y轴的坐标,v
xk
,v
yk
分别表示k时刻质心在x,y轴方向的速度,a
k
、b
k
分别表示k时刻椭圆的长轴和短轴,φ
k
表示k时刻椭圆长轴与x轴之间的夹角。
[0020]
在本发明的一个实施例中,所述步骤s2包括:
[0021]
2a.根据上一时刻的重采样标签粒子集,得到存活标签粒子集,所述存活标签粒子集为:
[0022][0023]
其中,表示k-1时刻第i个存活粒子的状态向量,表示k-1时刻第i个存活粒子的权重,表示k-1时刻第i个存活粒子的标签,表示k-1时刻的存活粒子的标签集,l
k-1
表示k-1时刻的存活标签粒子数目,n
k-1
表示k-1时刻的目标估计数目;
[0024]
2b.通过ms划分后得到m个划分单元w
j
,j=1,
…
m,则k时刻的新生标签集为
[0025]
2c.对每个划分单元中的每个量测补入m个新生标签粒子,获取新生标签粒子数目以及每个新生标签粒子权重其中,
[0026]
[0027][0028]
其中,p
b
(
·
)表示新生目标强度;
[0029]
2d.根据所述新生标签粒子数目以及所述每个新生标签粒子权重得到所述新生标签粒子集:
[0030][0031]
其中,表示k时刻第i个新生粒子的状态向量,表示k时刻第i个新生粒子的权值,表示k时刻第i个新生粒子的粒子标签。
[0032]
在本发明的一个实施例中,所述步骤s3包括:对所述新生标签粒子集和所述存活标签粒子集求并集,得到所述新的标签粒子集,所述新的标签粒子集为:
[0033][0034]
所述新的标签粒子集的标签粒子数目为:
[0035][0036]
所述新的标签粒子集的标签集为:
[0037][0038]
在本发明的一个实施例中,所述步骤s4包括:
[0039]
4a.根据预测方程对所述新的标签粒子集进行状态预测,得到预测处理后的标签粒子集,其中,
[0040]
所述预测方程为:
[0041][0042][0043]
在预测过程中,粒子数目及其标签保持不变:
[0044][0045]
其中,f表示状态转移矩阵,p
s,k
(
·
)表示目标存活概率,其值为预设的常数,v
k
表示协方差为q
k
的状态噪声,表示新的标签粒子集的标签粒子数目;
[0046]
4b.根据当前量测及似然函数对所述预测处理后的标签粒子集进行更新,得到所述更新后的标签粒子集其中,其中,
[0047]
在本发明的一个实施例中,所述步骤s5包括:
[0048]
5a.根据不同的目标标识θ
n
将所述更新后的标签粒子集划分为若干个子集:
[0049]
[0050]
其中,表示更新后的标签粒子集中目标标识为θ
n
的粒子数目;
[0051]
5b.对每个子集拟合一个扩展目标的后验强度,根据所述扩展目标的后验强度,得到每个子集的粒子权值和
[0052][0053][0054]
5c.将所述粒子权值和与预设的门限值η比较,若则扩展目标存活;若时,则扩展目标消失,从所述更新后的标签粒子集中将该子集删除,同时,从标签集中将该目标标识θ
n
删除,得到经过标签处理的标签粒子集,其中,
[0055]
所述经过标签处理的标签粒子集为:
[0056][0057]
其中,l
k
表示标签处理后的标签粒子数目;
[0058]
k时刻扩展目标的数目为:
[0059][0060]
k时刻扩展目标的标签集为:
[0061][0062]
在本发明的一个实施例中,所述步骤s6包括:
[0063]
6a.将所述经过标签处理的标签粒子集的每一个子集的标签粒子状态加权平均得到该扩展目标的状态估计结果,
[0064]
所述扩展目标的状态估计结果为:
[0065][0066]
6b.根据所述扩展目标的状态估计结果得到所述扩展目标的状态估计集
[0067][0068]
6c.在滤波过程中,根据所述扩展目标的状态估计集,将具有相同目标标识的估计结果连接起来,用不同的图标或者颜色表示不同的目标标识,得到所述多扩展目标航迹。
[0069]
在本发明的一个实施例中,所述步骤s7包括:
[0070]
对所述经过标签处理的标签粒子集的每一个子集,进行重采样得到所述重采样标签粒子集:
[0071]
[0072]
与现有技术相比,本发明的有益效果在于:
[0073]
本发明的基于椭圆rhm的标签粒子多扩展目标跟踪方法,基于rfs,用椭圆随机超曲面模型(random hypersurface model,rhm)对扩展目标形状进行建模,在新的多扩展目标新生标签粒子补入方法的基础上,提出基于椭圆rhm的标签粒子多扩展目标跟踪方法,该方法运算速度快,跟踪精度高,不仅能够准确估计多扩展目标质心状态及形状,还可以获得目标航迹,区分不同目标。
[0074]
上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
[0075]
图1是本发明实施例提供的椭圆随机超曲面及其量测模型图;
[0076]
图2是本发明实施例提供的一种基于椭圆rhm的标签粒子多扩展目标跟踪方法的流程框图;
[0077]
图3是本发明实施例提供的一种基于椭圆rhm的标签粒子多扩展目标跟踪方法的流程实现图;
[0078]
图4是本发明实施例提供的一种仿真实验的扩展目标质心运动轨迹及其真实形状示意图;
[0079]
图5是本发明实施例提供的一种仿真实验的扩展目标量测图
[0080]
图6是本发明实施例提供的et-lp-phd一次估计结果示意图;
[0081]
图7是本发明实施例提供的一种仿真扩展目标的平均数目估计图;
[0082]
图8是本发明实施例提供的一种扩展目标质心平均ospa距离示意图;
[0083]
图9是本发明实施例提供的一种扩展目标的估计椭圆形状的长轴、短轴和朝向角的ospa距离的示意图。
具体实施方式
[0084]
为了进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及具体实施方式,对依据本发明提出的一种基于椭圆rhm的标签粒子多扩展目标跟踪方法进行详细说明。
[0085]
有关本发明的前述及其他技术内容、特点及功效,在以下配合附图的具体实施方式详细说明中即可清楚地呈现。通过具体实施方式的说明,可对本发明为达成预定目的所采取的技术手段及功效进行更加深入且具体地了解,然而所附附图仅是提供参考与说明之用,并非用来对本发明的技术方案加以限制。
[0086]
本发明的基于椭圆rhm的标签粒子多扩展目标跟踪方法,是基于椭圆rhm的多扩展目标标签粒子phd(extended target labeled particle phd,et-lp-phd)滤波算法的,首先对椭圆随机超曲面进行简单介绍。
[0087]
请参见图1,图1是本发明实施例提供的椭圆随机超曲面及其量测模型图。如图所示,
[0088]
椭圆的目标状态向量x由质心运动参数和目标形状参数两部分组成:
[0089]
x=[m
x m
y v
x v
y a b φ]
t
ꢀꢀꢀ
(1),
[0090]
其中,[m
x m
y v
x v
y
]
t
表示质心运动状态,m
x
,m
y
分别表示质心在x,y轴的坐标,v
x
,v
y
分别表示质心在x,y轴方向的速度,a、b分别表示椭圆的长轴和短轴,φ表示椭圆朝向角,也就是椭圆的长轴与x轴间的夹角,规定逆时针为正方向。为了便于计算,将椭圆方程写为极坐标形式:
[0091][0092]
量测源在真实形状的缩小版本上,则椭圆rhm上的量测源为:
[0093]
y=m+s
·
r(θ;a,b,φ)e
ꢀꢀꢀ
(3),
[0094]
e=[cosθ sinθ]
t
ꢀꢀꢀ
(4),
[0095]
其中,s表示缩放因子,m表示椭圆质心,e表示极坐标系到直角坐标系的转换向量,对于未知参数θ,用量测到椭圆质心的向量与x轴间的夹角代替。
[0096]
椭圆rhm上的量测源产生的量测为:
[0097]
z=m+s
·
r(θ;a,b,φ)e+v
ꢀꢀꢀ
(5),
[0098]
其中,v表示加性噪声。
[0099]
实施例一
[0100]
请结合参见图2和图3,图2是本发明实施例提供的一种基于椭圆rhm的标签粒子多扩展目标跟踪方法的流程框图;图3是本发明实施例提供的一种基于椭圆rhm的标签粒子多扩展目标跟踪方法的流程实现图。如图所示,本实施例的基于椭圆rhm的标签粒子多扩展目标跟踪方法,包括:
[0101]
s1:在初始时刻,对每个目标分配l0个标签粒子,对目标初始状态进行采样,得到初始化标签粒子集;
[0102]
初始化标签粒子集为:
[0103][0104][0105]
其中,表示初始时刻第i个粒子的状态向量,表示初始时刻第i个粒子的权值,表示初始时刻第i个粒子的粒子标签,θ0表示初始时刻的标签集,θ
n
表示目标标识,n0表示初始时刻存在的目标数目;
[0106]
在本实施例中,对目标进行状态采样,包括对目标的质心运动参数[m
xk m
yk v
xk v
yk
]
t
和形状参数[a
k
,b
k
,φ
k
]同时进行随机采样,其中,
[0107]
[m
xk m
yk v
xk v
yk
]
t
为k时刻的质心运动参数,m
xk
,m
yk
分别表示k时刻质心在x,y轴的坐标,v
xk
,v
yk
分别表示k时刻质心在x,y轴方向的速度,a
k
、b
k
分别表示k时刻椭圆的长轴和短轴,φ
k
表示k时刻椭圆长轴与x轴之间的夹角。
[0108]
s2:根据上一时刻的重采样标签粒子集,得到存活标签粒子集,对目标的量测进行划分,得到m个划分单元,对每个划分单元中的每个量测补入m个新生标签粒子,得到新生标
签粒子集,其中,对同一划分单元中的量测采样的粒子分配相同的标签,对不同划分单元中的量测采样的粒子分配不同的标签;
[0109]
具体地,步骤s2包括:
[0110]
2a.根据上一时刻的重采样标签粒子集,得到存活标签粒子集,在本实施例中,假设k-1时刻的存活标签粒子集为:
[0111][0112]
其中,表示k-1时刻第i个存活粒子的状态向量,表示k-1时刻第i个存活粒子的权重,表示k-1时刻第i个存活粒子的标签,表示k-1时刻的存活粒子的标签集,l
k-1
表示k-1时刻的存活标签粒子数目,n
k-1
表示k-1时刻的目标估计数目;
[0113]
2b.假设k时刻通过ms(mean shift,均值漂移)划分后得到m个划分单元w
j
,j=1,
…
m,则k时刻的新生标签集为
[0114]
2c.对每个划分单元中的每个量测采样补入m个新生标签粒子,获取新生标签粒子数目以及每个新生标签粒子权重其中,
[0115][0116][0117]
其中,p
b
(
·
)表示新生目标强度,在本实施例中,新生目标强度设置为0.01;
[0118]
2d.根据新生标签粒子数目以及每个新生标签粒子权重得到新生标签粒子集:
[0119][0120]
其中,表示k时刻第i个新生粒子的状态向量,表示k时刻第i个新生粒子的权值,表示k时刻第i个新生粒子的粒子标签。
[0121]
s3:将新生标签粒子集和存活标签粒子集进行合并,得到新的标签粒子集;
[0122]
具体地,包括,对新生标签粒子集和存活标签粒子集求并集,得到新的标签粒子集为:
[0123][0124]
新的标签粒子集的标签粒子数目为:
[0125][0126]
新的标签粒子集的标签集为:
[0127]
[0128]
s4:根据预测方程和似然函数,对新的标签粒子集进行预测和更新,得到更新后的标签粒子集,其中,在预测和更新过程中,粒子数目及其标签保持不变;
[0129]
具体地,步骤s4包括:
[0130]
4a.根据预测方程对新的标签粒子集进行状态预测,得到预测处理后的标签粒子集,其中,
[0131]
预测方程为:
[0132][0133][0134]
在预测过程中,粒子数目及其标签保持不变:
[0135][0136]
其中,f表示状态转移矩阵,p
s,k
(
·
)表示目标存活概率,其值为预设的常数,v
k
表示协方差为q
k
的状态噪声,表示新的标签粒子集的标签粒子数目;
[0137]
4b.根据当前量测及似然函数对预测处理后的标签粒子集进行更新,得到更新后的标签粒子集其中,在更新过程中,粒子数目及其标签保持不变,即,
[0138]
具体地,对根据当前量测及似然函数对预测处理后的标签粒子集进行更新,进行具体说明如下:
[0139]
单扩展目标量测似然函数为:
[0140][0141]
其中,z
k
表示量测,比例因子s服从均值为协方差为高斯分布:
[0142][0143]
则式(18)可以写为:
[0144][0145]
式(20)在椭圆rhm框架下的闭合形式为:
[0146][0147]
其中,
[0148]
[0149][0150][0151][0152][0153][0154]
b
k
=z
k-m
k
ꢀꢀꢀ
(28),
[0155]
θ
k
=arctan(z
ky-m
ky
,z
kx-m
kx
)
ꢀꢀꢀ
(29),
[0156]
其中,式中,a
k
,b
k
,φ
k
表示椭圆形状参数,θ
k
表示量测到质心与
x
轴形成的夹角,z
k
表示量测,m
k
表示椭圆质心,z
ky
,m
ky
分别表示量测和质心的y轴坐标,z
kx
,m
kx
分别表示量测和质心的
x
轴坐标。
[0157]
为了便于计算,将式(21)表示的似然函数化为对数形式:
[0158][0159]
假设k时刻量测集为m
k
表示量测数目,由于量测相互独立,所以多扩展目标量测似然函数为:
[0160][0161]
其对数形式为:
[0162][0163]
根据多扩展目标量测似然函数,更新为多目标预测phd与量测伪似然函数相乘:
[0164]
d
k
(x|z
k
)=l
z
(x)d
k|k-1
(x|z
k-1
)
ꢀꢀꢀ
(33),
[0165]
其中,d
k|k-1
(x|z
k-1
)表示多目标预测phd。
[0166]
s5:根据不同的目标标识将更新后的标签粒子集划分为若干个子集,获取每个子集的粒子权值和,将粒子权值和与预设的门限值比较,根据比较结果,得到经过标签处理的标签粒子集;
[0167]
具体地,步骤s5包括:
[0168]
5a.根据不同的目标标识θ
n
将更新后的标签粒子集划分为若干个子集:
[0169][0170]
其中,表示更新后的标签粒子集中目标标识为θ
n
的粒子数目;
[0171]
5b.对每个子集拟合一个扩展目标的后验强度,根据扩展目标的后验强度,得到每个子集的粒子权值和
[0172][0173][0174]
也就是,当粒子标签时,否则,
[0175]
5c.将粒子权值和与预设的门限值η比较,若则扩展目标存活;若时,则扩展目标消失,从更新后的标签粒子集中将该子集删除,同时,从标签集中将该目标标识θ
n
删除,得到经过标签处理的标签粒子集,其中,
[0176]
经过标签处理的标签粒子集为:
[0177][0178]
其中,l
k
表示标签处理后的标签粒子数目;
[0179]
k时刻扩展目标的数目为:
[0180][0181]
k时刻扩展目标的标签集为:
[0182][0183]
s6:根据经过标签处理的标签粒子集,获取扩展目标的状态估计集,根据扩展目标的状态估计集,得到多扩展目标航迹;
[0184]
具体地,步骤s6包括:
[0185]
6a.将经过标签处理的标签粒子集的每一个子集的标签粒子状态加权平均得到该扩展目标的状态估计结果,
[0186]
扩展目标的状态估计结果为:
[0187][0188]
6b.根据扩展目标的状态估计结果得到扩展目标的状态估计集
[0189][0190]
6c.在滤波过程中,根据扩展目标的状态估计集,将具有相同目标标识的估计结果
连接起来,用不同的图标或者颜色表示不同的目标标识,得到多扩展目标航迹。
[0191]
由于扩展目标的状态估计集中含有目标标识,因此不同的目标可以用相应的目标标识进行区分。
[0192]
s7:对经过标签处理的标签粒子集进行重采样处理,得到重采样标签粒子集。
[0193]
具体地,步骤s7包括:
[0194]
对经过标签处理的标签粒子集的每一个子集,进行重采样得到重采样标签粒子集:
[0195][0196]
在步骤s5中,获得了经过标签处理的标签粒子集为:
[0197][0198]
对的粒子集进行重采样得到:
[0199][0200]
根据式(43),得到重采样标签粒子集。
[0201]
在本实施例中,重采样过程为,在由目标标识区分的各个标签粒子子集中复制权重较大的粒子,舍弃权值较小的粒子。重采样标签粒子集作为步骤s2中的存活标签粒子集。
[0202]
本实施例的基于椭圆rhm的标签粒子多扩展目标跟踪方法,基于rfs,用椭圆随机超曲面模型对扩展目标形状进行建模,在新的多扩展目标新生标签粒子补入方法的基础上,提出基于椭圆rhm的标签粒子多扩展目标跟踪方法,该方法运算速度快,跟踪精度高,不仅能够准确估计多扩展目标质心状态及形状,还可以获得目标航迹,区分不同目标。
[0203]
实施例二
[0204]
本实施例结合matlab仿真实验对实施例一的基于椭圆rhm的标签粒子多扩展目标跟踪方法的多扩展目标跟踪效果进行说明。
[0205]
在本实施例的仿真实验中,跟踪目标为匀速直线运动目标。观测场景为二维平面区域,大小为[-600,600]
×
[-600,600](m2),并在观测区域中增加随机噪声作为真实场景的模拟,设计初始位置、大小、运动方向各异的多个椭圆形扩展目标在观测区域内进行匀速直线运动。各扩展目标的初始状态、形状参数以及存活时间如表1所示。
[0206]
表1各扩展目标的初始状态、形状参数及存活时间
[0207][0208]
从表1可以看出,扩展目标1从初始时刻开始运动,第5s时扩展目标2出现,第15s时,扩展目标1与扩展目标2相交,第20s时,扩展目标3出现在仿真场景中,同时,扩展目标4
由扩展目标2分裂产生,由第30s时,扩展目标3并入扩展目标1中。
[0209]
观测区域中所有扩展目标运动模型均为cv模型,扩展目标泊松率为15,且目标量测均匀分布在目标扩散范围内,杂波泊松率为5,均匀地分布在观测区域中。比例因子的分布为采样时间间隔为t
s
=1s,目标存活概率为p
s
=0.99,目标新生概率为p
b
=0.01,检测概率为p
d
=0.99,ospa距离参数为c=100,p=2。在et-lp-phd滤波算法中,初始时刻对每个目标用l0=600个粒子采样,新生粒子设置为m=60。扩展目标状态向量为包含运动参数和形状参数的七维矢量,状态方程和量测方程分别为:
[0210]
x
k
=f
k
x
k-1
+v
k
ꢀꢀꢀ
(45),
[0211]
z
k
=hx
k
+w
k
ꢀꢀꢀ
(46),
[0212]
其中,f
k
表示状态转移矩阵,v
k
表示协方差为q
k
的状态噪声,h表示量测矩阵,w
k
表示协方差为r
k
的量测噪声,参数取值如下:
[0213][0214][0215][0216]
q1=0.1,q2=0.5,r
k
=0.52i2,
[0217]
其中,i
n
是n
×
n的单位矩阵,表示两个矩阵的直积。
[0218]
请结合参见图4和图5,图4是本发明实施例提供的一种仿真实验的扩展目标质心运动轨迹及其真实形状示意图,图5是本发明实施例提供的一种仿真实验的扩展目标量测图。图4中“·”表示扩展目标质心,椭圆表示扩展目标真实扩展形状。图5中
“×”
表示各个扩展目标产生的量测。
[0219]
请参见图6,图6是本发明实施例提供的et-lp-phd一次估计结果示意图。如图所示,不同扩展目标估计质心用不同的图标表示,具体为:1-14s扩展目标1的估计质心和形状分别用“·”和椭圆表示,15s时两个扩展目标相交,扩展目标2被检测到而扩展目标1漏检,16s扩展目标1被检测到,其标签改变,对应的用“o”和椭圆表示其质心和扩展形状,
“×”
和椭圆表示扩展目标2的估计质心和形状,“*”和椭圆表示扩展目标3的估计质心及形状,“+”和椭圆表示扩展目标4的估计质心和形状。因此可以看出,et-lp-phd在获得扩展目标质心、形状估计的基础上,可以区分不同目标,形成目标航迹。
[0220]
请参见图7,图7是本发明实施例提供的一种仿真扩展目标的平均数目估计图。图中为100次蒙特卡洛仿真扩展目标数目估计的平均值,从图中可以看出,第15s时,由于两个目标交叉,出现漏估的情况,第20s时,同时出现新生目标和衍生目标,由于衍生目标在前一时刻的量测附近产生,因此可以预测到衍生目标。在et-lp-phd算法中,当具有相同标签的粒子子集的权重和大于阈值η时,认为目标存活或者目标新生,对这些标签粒子子集中的粒子权重求和得到目标估计数目,因此et-lp-phd滤波算法对目标数目的估计值略小于真实
数目,但仍能够准确地估计扩展目标数目。
[0221]
请结合参见图8和图9,图8是本发明实施例提供的一种扩展目标质心平均ospa距离示意图,图9是本发明实施例提供的一种扩展目标的估计椭圆形状的长轴、短轴和朝向角的ospa距离的示意图。从图8中可以看出,本发明的方法可以准确地估计扩展目标质心。第5s和第20s,由于新生扩展目标的出现,ospa距离出现峰值,第15s,由于扩展目标交叉出现漏检,ospa距离出现峰值。从图9中可以看出,基于新的扩展目标新生标签粒子补入方法的et-lp-phd滤波算法可以很好的估计扩展目标形状。
[0222]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1