一种划片机的基于图像的模板检查算法的制作方法
[0001]
本发明涉及砂轮划片机,特别提供一种划片机的基于图像的模板检查算法。
背景技术:
[0002]
划片机在自动对准之前必须要进行模板教学,将要识别的目标图案注册到机器内存中,在自动对准时实时调取目标图案的数据,以实现图像的模式匹配。在模板教学时,并不是任意的图案都可以选取为模板,首先在图像质量方面,目标图案必须呈现足够的对比度、不明显的噪声,以使程序能够提取足够的特征点。其次,die作为为最小的切割单元,目标图案必须在所要切割的die内是唯一的,在整个工件范围内水平和竖直方向具有等距性。另外,当目标图案发生一定的旋转时程序仍能正确的识别。
技术实现要素:
[0003]
本发明的目的在于提供一种划片机的基于图像的模板检查算法,实时采集工件图像,对图像进行特征点、唯一性、步进性、旋转性四个方面的检查,以使得选取的模板符合上述特征,保证自动对准的正确实施。
[0004]
本发明技术方案如下:
[0005]
本发明专利的检查算法建立在划片机的运动与图像识别系统之上,划片机的运动系统主要由x、y、z、t轴组成,其中t轴表示旋转轴,上面有工作台,t轴固定在x轴上,x轴可以左右运动,显微镜固定在y轴上,y轴可以前后运动,z轴固定在y上,可以上下运动。检查算法通过对抓取图像进行特征分析、旋转工作台、驱动xy电机带动镜头运动以完成对不同模板特性的验证。
[0006]
本发明提供一种划片机的基于图像的模板检查算法,具体步骤为:
[0007]
步骤一:指定目标图案,抓取图像进行特征点分析;
[0008]
步骤二:满足步骤一的条件后,在当前位置按照指定步长逆时针对目标图案进行搜寻;
[0009]
步骤三:满足步骤二的条件后,沿u字进行步进验证;
[0010]
步骤四:满足步骤三的条件后,分别将工作台转至
±5°
,对角度进行验证;
[0011]
步骤五:满足所有条件之后结束验证,登记该模板。
[0012]
本发明对于模板教学过程中目标图案的选取是否合理的问题,通过搭载高低倍率显微镜、旋转工作台、伺服电机,实时采集工件图像,对图像进行特征点、唯一性、步进性、旋转性四个方面的检查,以使得选取的模板符合上述特征,保证自动对准的正确实施。
附图说明
[0013]
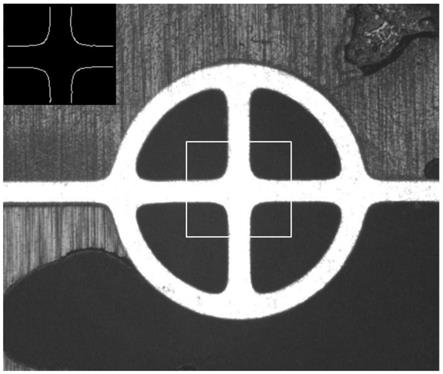
图1为本发明提供的目标图案示意图(其中,白色矩形框为选定的模板,左上角为提取到的轮廓特征)。
[0014]
图2为本发明提供的u字进行步进检测示意图。
[0015]
图3为本发明提供的在一个die范围内进行唯一性检测示意图。
[0016]
图4为本发明提供的将目标图像旋转
±
5度后进行识别示意图。
具体实施方式
[0017]
实施例1
[0018]
本发明专利的检查算法建立在划片机的运动与图像识别系统之上,划片机的运动系统主要由x、y、z、t轴组成,其中t轴表示旋转轴,上面有工作台,t轴固定在x轴上,x轴可以左右运动,显微镜固定在y轴上,y轴可以前后运动,z轴固定在y上,可以上下运动。检查算法通过对抓取图像进行特征分析、旋转工作台、驱动xy电机带动镜头运动以完成对不同模板特性的验证。
[0019]
本实施例提供一种划片机的基于图像的模板检查算法,参见图1-4;具体步骤为:
[0020]
步骤一:指定目标图案,抓取图像进行特征点分析;
[0021]
步骤二:满足步骤一的条件后,在当前位置按照指定步长逆时针对目标图案进行搜寻;
[0022]
步骤三:满足步骤二的条件后,沿u字进行步进验证;
[0023]
步骤四:满足步骤三的条件后,分别将工作台转至
±5°
,对角度进行验证;
[0024]
步骤五:满足所有条件之后结束验证,登记该模板。
[0025]
本发明对于模板教学过程中目标图案的选取是否合理的问题,通过搭载高低倍率显微镜、旋转工作台、伺服电机,实时采集工件图像,对图像进行特征点、唯一性、步进性、旋转性四个方面的检查,以使得选取的模板符合上述特征,保证自动对准的正确实施。
[0026]
本发明未尽事宜为公知技术。
[0027]
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1