一种基于复杂地形的SAR图像地物分类方法及装置与流程
一种基于复杂地形的sar图像地物分类方法及装置
技术领域
[0001]
本发明涉及合成孔径雷达图像处理技术领域,具体涉及一种基于复杂地形的sar图像地物分类方法及装置。
背景技术:
[0002]
合成孔径雷达(synthetic aperture radar,sar)采用主动式微波遥感传感技术,能够在各种气候下全天时、全天候的对地进行成像。主动式微波遥感是指sar会主动向物体发射微波波段的电磁波,该微波对云、雨、雾等有很强的穿透能力,然后接受该电磁波的反射信息进行成像。
[0003]
遥感图像地物分类是遥感领域重要的研究内容,而sar由于独特的观测优势和覆盖面积广等特点,使得sar图像地物分类成为遥感图像地物分类中独特的技术之一,也是sar图像解译的重要研究内容。
[0004]
地物分类是将地表相对固定的物体分类的系统体系,是地表地物观测与测绘的重要手段之一。基于sar影像开展地理国情监测,如“耕地红线”、“生态红线”等,在实际应用中,由于复杂地形地表的高程起伏,会产生sar图像成像结果与实际情况的几何失真。几何失真通常表现为迎坡收缩、背坡拉伸、叠掩和阴影。迎坡收缩会导致收缩区域回波能量相对集中,导致收缩区域地物的后向散射系数比实际的值大;背坡拉伸会导致拉伸区域的回波能量相对分散,导致拉伸区域地物的后向散射系数比实际的值小;叠掩会导致顶底倒置,叠掩区域的回波能量更加集中,叠掩区域往往在sar图像上表现较亮,后向散射系数与建筑相近;阴影区域为雷达波束照射不到的地方,阴影区域往往在sar图像上表现较暗,后向散射系数与水域接近。
[0005]
同时,复杂地形往往会导致sar图像中出现“同物异谱”的现象,也会增加复杂地形地物分类的难度,而目前主要通过人工方式提取地物要素,效率低,耗资巨大。
[0006]
因此,需要提供一种针对上述现有技术中不足的改进技术方案。
技术实现要素:
[0007]
本发明的目的在于提供一种基于复杂地形的sar图像地物分类方法及装置,以解决现有存在的上述技术问题。
[0008]
为了解决上述技术问题,本发明提供如下技术方案:
[0009]
一种基于复杂地形的sar图像地物分类方法,所述基于sar图像地物分类方法包括如下步骤:
[0010]
步骤s1,获取所述复杂地形的sar图像,并对所述sar图像进行预处理;预处理包括多视处理、图像配准、相干斑噪声抑制、辐射定标和地理编码;所述sar图像为时间序列sar图像数据;
[0011]
步骤s2,基于所述预处理后的sar图像,计算预设地物类型在不同时相、不同极化方式下的后散射系数;所述预设地物类型包括农田、水域、森林和建筑;所述极化包括vv极
化和vh极化;
[0012]
步骤s3,依据所述预设地物类型,对所述预处理后的sar图像进行初始分类,得到sar图像的第一次地物分类结果图;
[0013]
步骤s4,基于所述后散射系数对所述第一次分类结果图进行校正处理,得到sar图像的最终地物分类结果图;所述校正处理包括叠掩区域检测与纠正、阴影区域检测与纠正、迎坡区域检测与纠正和背坡区域检测与纠正。
[0014]
进一步的,步骤2中,预设地物类型在不同时相、不同极化方式下的后散射系数的计算过程如下:先获取相同时相、不同类型的地物样本;再计算相同时相、不同类型地物的后向散射系数;最后获取不同类型地物在不同时相、不同极化方式下的后向散射系数。
[0015]
进一步的,所述不同时相、不同极化方式下的图像包括第一时相vv极化图像、第二时相vv极化图像、第三时相vv极化图像和第一时相vh极化图像;所述第一时相为最容易区分地物类型的图像;所述第二时相vv极化图像为农田后散射系数最大的图像;所述第三时相vv极化图像为农田后散射系数最小的图像。
[0016]
进一步的,所述第一次地物分类结果图的得到过程如下:
[0017]
基于预处理后的sar图像,确定一个时相、一种极化方式的sar图像,作为预处理后的基础sar图像,所述基础sar图像为第一时相vv极化图像;
[0018]
采用改进的ogmrf-rc算法对所述基础sar图像进行分类处理,得到sar图像的第一地物分类结果。
[0019]
进一步的,叠掩区域检测与纠正的过程为:
[0020]
通过所述预处理后的sar图像获取第一时相vh极化建筑图像和第一时相vv极化建筑图像;
[0021]
确定第一时相的vv极化建筑图像和第一时相的vh极化建筑图像的第一差值图;
[0022]
利用基于区域的fcm算法,从所述第一差值图中提取建筑和叠掩区域信息,并得到对应的建筑二值图和叠掩区域二值图;
[0023]
通过所述sar图像的第一次地物分类结果,获取农田信息,并进行二值化处理,得到农田二值图;基于所述农田二值图、所述建筑二值图、所述叠掩区域二值图获取叠掩区域的邻域建筑和农田,利用小连通域去除方法进行处理纠正,得到纠正后的建筑二值图和叠掩区域二值图;并把纠正后的叠掩区域二值图对应的叠掩区域地物纠正为森林,从而得到sar图像的第二次地物分类结果图。
[0024]
进一步的,阴影区域检测与纠正的过程为:
[0025]
通过所述sar图像的第一次地物分类结果图,提取水域信息,并二值化处理,得到水域二值图;
[0026]
通过所述叠掩二值图和所述水域二值图,获取水域连通域的的邻域叠掩,基于阴影和邻域叠掩的空间相邻关系确定新的水域和阴影区域;
[0027]
在sar图像的第二次地物分类结果图中,将阴影区域纠正为森林,得到sar图像的第三次地物分类结果图。
[0028]
进一步的,背坡森林区域检测与纠正过程为:
[0029]
通过所述预处理后的sar图像,选取第一时相vv极化图像和第二时相vv极化图像;
[0030]
基于所述sar图像的第一次地物分类结果、所述第一时相vv极化图像和第二时相
vv极化图像,获取第一时相vv极化农田图像和所述第二时相vv极化农田图像的第二差值图;
[0031]
从所述第二差值图中提取农田二值图和背坡森林二值图;
[0032]
基于所述农田二值图和背坡森林二值图获取背坡森林连通的邻域农田,利用小连通域去除方法进行处理纠正,得到纠正后的农田和背坡森林区域,并把所述sar图像的第三次地物分类结果图中的纠正的背坡森林区域再次纠正为森林,从而得到sar图像的第四次地物分类结果图。
[0033]
进一步的,从所述第二差值图中提取农田二值图和背坡森林二值图时基于区域的fcm算法。
[0034]
进一步的,迎坡农田区域检测与纠正过程为:
[0035]
通过所述预处理后的sar图像,选取第三时相vv极化图像;
[0036]
对所述第三时相vv极化图像做分类处理;
[0037]
将第三时相vv极化图像做分类处理结果中背坡森林区域进行纠正,获取农田信息;并进行二值化处理得到第三时相农田二值图;
[0038]
将第一时相农田二值图和第三时相农田二值图合并,将合并后的农田信息,作为农田的分类结果;
[0039]
依据所述农田的分类结果,在sar图像的第四地物分类结果图中,将迎坡农田区域纠正为农田,得到sar图像的第五地物分类结果图,所述sar图像的第五地物分类结果图为sar图像的最终地物分类结果图。
[0040]
为了解决上述技术问题,本发明还提供一种基于复杂地形的sar图像地物分类装置,所述基于复杂地形的sar图像地物分类装置包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器在执行所述计算机程序时实现上述基于复杂地形的sar图像地物分类方法的步骤。
[0041]
与最接近的现有技术相比,本发明提供的技术方案具有如下优异效果:
[0042]
本发明先对获取的sar图像进行预处理,并基于预处理后的sar图像现有第一次分类的基础上,增加了叠掩区域检测与纠正、阴影区域检测与纠正、迎坡区域检测与纠正和背坡区域检测与纠正的校正处理,能够sar图像的最终地物分类结果图;通过增加的校正处理,能够提高地物分类结果的准确性。
附图说明
[0043]
构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。其中:
[0044]
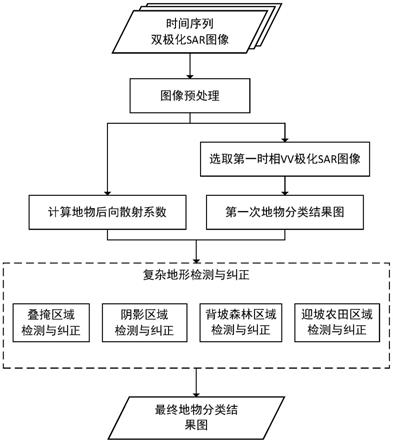
图1为本发明为基于复杂地形的sar图像地物分类方法的总体流程图;;
[0045]
图2为本发明为基于复杂地形的sar图像的预处理流程图;
[0046]
图3为本发明为基于复杂地形的sar图像地物在不同极化方式下的向散射系数计算流程图;
[0047]
图4为本发明基于复杂地形的sar图像的初始分类处理流程图;
[0048]
图5为本发明基于复杂地形的叠掩区域检测与纠正处理的流程图;
[0049]
图6为本发明基于复杂地形的阴影区域检测与纠正处理的流程图;
[0050]
图7为本发明基于复杂地形的背坡森林区域检测与纠正的流程图;
[0051]
图8为本发明基于复杂地形的迎坡农田区域检测与纠正的流程图;
[0052]
图9(a)为2020年04月25日vv极化图像;
[0053]
图9(b)为2020年04月25日vh极化图像;
[0054]
图9(c)为2019年08月17日vv极化图像;
[0055]
图9(d)为2020年03月20日vv极化图像;
[0056]
图10(a)为本发明实施例中选取地物样本后得到的vv极化地物的时间序列后向散射系数变化图;
[0057]
图10(b)为本发明实施例中选取地物样本后得到的vh极化地物的时间序列后向散射系数变化图;
[0058]
图11为本发明实施例中sar图像的第一次地物分类结果图;
[0059]
图12(a)为本发明实施例中sar图像的纠正前的叠掩二值图;
[0060]
图12(b)为本发明实施例中sar图像的纠正前的建筑二值图;
[0061]
图12(c)为本发明实施例中sar图像的叠掩区域地物纠正后的分类结果图;
[0062]
图13(a)为本发明实施例中sar图像的纠正前的阴影二值图;
[0063]
图13(b)为本发明实施例中sar图像的纠正前的水域二值图;
[0064]
图13(c)为本发明实施例中sar图像的阴影区域纠正后的分类结果图图14(a)为本发明实施例中sar图像的纠正前的背坡森林二值图;
[0065]
图14(b)为本发明实施例中sar图像的纠正前的农田二值图;
[0066]
图14(c)为本发明实施例中sar图像的背坡森林区域纠正后的分类结果图;
[0067]
图15(a)为本发明实施例中迎坡农田二值图;
[0068]
图15(b)为本发明实施例中sar图像的最终农田区域二值图;
[0069]
图15(c)为本发明实施例中sar图像纠正后的最终分类结果。
具体实施方式
[0070]
下面将参考附图并结合实施例来详细说明本发明。各个示例通过本发明的解释的方式提供而非限制本发明。实际上,本领域的技术人员将清楚,在不脱离本发明的范围或精神的情况下,可在本发明中进行修改和变型。例如,示为或描述为一个实施例的一部分的特征可用于另一个实施例,以产生又一个实施例。因此,所期望的是,本发明包含归入所附权利要求及其等同物的范围内的此类修改和变型。
[0071]
本发明提供了一种基于sar图像地物分类方法,首先获取研究区时间序列sar图像,分析地物的后向散射系数变化趋势,对sar图像先进行地物类型的初始分类,然后对第一次分类结果图进行校正处理,从而得到精确的地物类型的分类结果,通过校正处理能够改变因为复杂地形导致错误的分类结果,从而提高地物类型的分类结果精度。
[0072]
方法实施例:
[0073]
如图1所示为本发明基于复杂地形的sar图像地物分类方法的总体流程图;以下结合图1对本申请的地物分类方法的过程进行详细的介绍。
[0074]
步骤s1,获取所述复杂地形的sar图像,并对所述sar图像进行预处理;预处理包括多视处理、图像配准、相干斑噪声抑制、辐射定标和地理编码;所述sar图像为时间序列sar
图像数据。
[0075]
通过合成孔径雷达获取sar图像,然后对sar图像进行如图2所示的预处理过程:
[0076]
首先,对sar图像进行多视处理,能够降低空间分辨率,进而提升sar图像数据的辐射分辨率;
[0077]
然后,对sar图像中的像素进行配准,并采用精致lee滤波对配准后的sar图像进行相干斑噪声的抑制,具体,滤波窗口大小为7
×
7;降低噪声对图像的影响;
[0078]
最后,对sar图像进行辐射定标,并采用地理信息将辐射定标后sar图像进行地理编码,便于后续处理。
[0079]
步骤s2,基于所述预处理后的sar图像,计算预设地物类型在不同时相、不同极化方式下的后散射系数;所述预设地物类型包括农田、水域、森林和建筑;所述极化包括vv极化和vh极化。
[0080]
如图3所示为本发明sar图像地物在不同极化方式下地物的时间序列后向散射系数流程图,在计算地物的后散射系数时执行以下过程:
[0081]
步骤s21,获取相同时相、不同类型的地物样本图像;
[0082]
对于一种类型的地物样本获取方式,在sar图像中选取某类型对应的10处地物样本图像,每处地物样本图像大小均为7
×
7;即每个地物样本图像有49个像素。
[0083]
步骤s22,计算相同时相、不同类型地物的后向散射系数;
[0084]
对于一种类型的每处地物样本图像来讲,每个像素均对应一个后向散射系数,因此,通过每处地物样本图像的像素值获取对应的后向散射系数值,然后将49个后向散射系数值求平均的结果作为该处地物样本图像的后向散射系数;
[0085]
同理,再计算其他9处地物样本图像的后向散射系数;
[0086]
最后,将10处地物样本图像的后向散射系数求平均值;所述10处地物样本图像的均值结果作为该类型地物的后向散射系数。
[0087]
步骤s23,获取不同类型地物在不同时相、不同极化方式下的后向散射系数。
[0088]
所述时相是指地物样本图像的时间。预处理后的图像在不同时相、不同极化方式下有很多景图像,在本申请中基于预处理后的sar图像中选取第一时相vv极化图像、第二时相vv极化图像、第三时相vv极化图像和第一时相vh极化图像。
[0089]
通过步骤2能够获得预设地物在不同时相下的后向散射系数,即分别获得农田的后向散射系数、水域的后向散射系数、森林的后向散射系数和建筑的后向散射系数。
[0090]
具体的,在本申请实施例中,基于所述预处理后的sar图像,分别获取第一时相(时相1)、第二时相(时相2)和第三时相(时相3)对应的vv极化图像,即得到第一时相vv极化图像、第二时相vv极化图像和第三时相vv极化图像;基于所述预处理后的sar图像,还获取第一时相(时相1)对应的vh极化图像,即得到第一时相vh极化图像;
[0091]
在本申请实施例中,将vv极化时间序列中最容易区分地物类型的时相作为第一时相;将vv极化时间序列中农田后向散射系数最大的时相作为第二时相;将vv极化时间序列中农田后散射系数最小的时相作为第三时相。
[0092]
步骤s3,依据所述预设地物类型,对所述预处理后的sar图像进行初始分类,得到sar图像的第一次地物分类结果图。
[0093]
步骤s31,基于预处理后的sar图像,确定一个时相、一种极化方式的sar图像,作为
预处理后的基础sar图像,所述基础图像是能够容易区分地物类型的图像;
[0094]
在本申请实施例中,为了提高地物分类结果的精度,选择最容易区分地物类型的图像作为所述基础图像,即选择第一时相(时相1)vv极化图像作为预处理后的基础sar图像;
[0095]
步骤s32,采用改进的ogmrf-rc(ogmrf-rc为基于区域系数的对象高斯马尔可夫模型)算法对所述基础sar图像进行分类处理,得到sar图像的所述第一次地物分类结果图。
[0096]
基于改进的ogmrf-rc算法对图像的具体处理过程为现有技术,如图4所示,此处不再对图像的分类处理的每一步分别进行详细介绍,仅重点给出本发明所依据的改进的ogmrf-rc目标函数。
[0097]
在本实施例中,改进的ogmrf-rc目标函数为:
[0098][0099]
式中,h表示类别,x
i
和x
j
为区域r
i
和r
j
已知的类别号,μ
h
为均值,σ
h
为方差,g
h
为均值为零时的高斯白噪声,v(x
i
,x
j
)为势能函数;
[0100]
其中,
[0101][0102][0103][0104][0105]
其中,β为势能参数,y
i
表示区域r
i
的特征,表示区域r
i
的邻域集合,θ
i,j
表示区域r
i
和r
j
之间的相关性,e
i,j
表示区域r
i
和r
j
边缘相邻的像素数,这里所说的区域r
i
和r
j
是原始图像经过slic超像素分割算法得到的,p
1
(h)和p
2
(h|y
i
)表示区域r
i
属于类别h的概率;
[0106][0107][0108][0109]
其中,|r
j
|表示区域r
j
的像素数,e
i
表示区域r
i
边缘的像素数,g(y
i
;θ
h
)表示θ
h
=(μ
h
,σ
h2
)的高斯分布,表示先验概率。
[0110]
通过改进的ogmrf-rc算法对所述基础图像的处理分类,得到sar图像的第一次地物分类结果图,即sar图像能够呈现出四类地物(农田、水域、森林和建筑)。
[0111]
步骤s4,基于所述后向散射系数对所述第一次分类图像结果图进行校正处理,得到sar图像的最终地物分类结果图;所述校正处理包括叠掩区域检测与纠正、阴影区域检测与纠正、迎坡区域检测与纠正和背坡区域检测与纠正。
[0112]
在本实施例中,通过对可能造成误分类的不同情况进行纠正,能够得到准确率更好的sar图像的地物分类结果图。
[0113]
步骤s41,叠掩区域检测与纠正;
[0114]
叠掩区域往往在sar图像上表现较亮,后向散射系数与建筑相近,会造成建筑与叠掩区域的误划分,因此,在本申请实施例中,需要对叠掩区域进行检测,并通过纠正处理,将叠掩区域中的建筑进行纠正,以提高叠掩区域分类结果的准确性。对于叠掩区域检测与纠正处理的过程如图5所示:
[0115]
步骤s411,通过所述预处理后的sar图像获取第一时相vh极化建筑图像和第一时相vv极化建筑图像;
[0116]
步骤s412,确定第一时相的vv极化建筑图像和第一时相的vh极化建筑图像的第一差值图;
[0117]
在本实施例中,第一差值图的获取方式如下:
[0118]
iamge
时相1建筑差值
=|iamge
时相1建筑vv-iamge
时相1建筑vh
|
[0119]
通过将第一时相(时相1)的vv极化建筑图像的像素值和第一时相(时相1)的vh极化建筑基础图像的像素值代入上述公式,即可获得对应的差值图。
[0120]
步骤s413,利用基于区域的fcm算法,从所述第一差值图中提取建筑和叠掩区域信息,并得到对应的建筑二值图和叠掩区域二值图;
[0121]
模糊c均值聚类算法,即fcm算法的目标函数如下:
[0122][0123]
式中,y={y
1
,y
2
,...,y
n
}表示图像y中共包含n个像素,m为模糊权重指数(通常m=2),c为聚类中心个数,v
j
表示第j个聚类中心,u
ij
表示第i个像素属于第j个聚类中心的隶属度(u
ij
需要满足)。
[0124]
通过fcm的目标函数对差值图进行处理,就能得到建筑和叠掩区域的区域信息;然后分别对建筑和叠掩区域的区域信息进行二值化处理,就能得到建筑二值图和叠掩区域二值图。
[0125]
步骤s414,通过所述sar图像的第一次地物分类结果,获取农田信息,并进行二值化处理,得到农田二值图;基于所述农田二值图、所述建筑二值图、所述叠掩区域二值图获取叠掩区域的邻域建筑和农田,利用小连通域去除方法进行处理纠正,得到纠正后的建筑二值图和叠掩区域二值图;并把纠正后的叠掩区域二值图对应的叠掩区域地物纠正为森林,从而得到sar图像的第二次地物分类结果图。
[0126]
在本申请实施例中,利用小连通域去除方法去除杂质,在去除杂质时,通过对叠掩连通域的判断,能够获取建筑和叠掩区域信息;
[0127]
对叠掩连通域的判断基于下述公式:
[0128][0129]
式中,s表示连通域像素个数,o为叠掩连通域,i为叠掩连通域编号,为编号为i叠掩的邻域建筑集合,为编号i的叠掩的邻域农田集合,20000代表20000个像素。
[0130]
如果叠掩连通域满足上述判断公式,则把所述sar图像的第一次地物分类结果图中对应的叠掩连通域纠正为建筑,否则把邻域中的建筑连通域全部纠正为叠掩,通过该方式能够获得纠正的建筑地物和纠正后的叠掩区域地物;再将纠正后的叠掩区域纠正为森林,从而得到sar图像的第二次地物分类结果图;
[0131]
步骤s42,阴影区域检测与纠正;
[0132]
阴影区域为雷达波束照射不到的地方,阴影区域往往在sar图像上表现较暗,后向散射系数与水域接近,会造成水域与阴影区域的误划分,因此,在本申请实施例中,需要对阴影区域进行检测,并通过纠正处理,将阴影区域中的水域进行纠正,以提高阴影区域分类结果的准确性。对于阴影区域检测与纠正处理的过程如图6所示:
[0133]
步骤s421,通过所述sar图像的第一次地物分类结果图,提取水域信息,并二值化处理,得到水域二值图;
[0134]
步骤s422,通过所述叠掩二值图和所述水域二值图,获取水域连通域的的邻域叠掩,基于阴影和邻域叠掩的空间相邻关系确定新的水域和阴影区域;
[0135]
当满足判断要求时,把水域连通域纠正为阴影;否则,水域连通域不变;
[0136][0137]
式中,s表示连通域像素个数,w为水域连通域,g为水域连通域编号,为编号为g的水域的邻域叠掩集合。
[0138]
步骤s423,在sar图像的第二次地物分类结果图中,将阴影区域纠正为森林,得到sar图像的第三次地物分类结果图。
[0139]
在本申请中,通过对阴影区域的检测与纠正,能够把阴影误判成水域的地物进行纠正,进而将实际的阴影区域纠正为森林,进一步纠正了关于阴影造成的误分类,提高地物分类的精确性。
[0140]
步骤s43,背坡森林区域检测与纠正;
[0141]
背坡拉伸会导致拉伸区域的回波能量相对分散,导致拉伸区域地物的后向散射系数比实际的值小;会造成农田与背坡森林区域的误划分,因此,在本申请实施例中,需要对背坡森林区域进行检测,并通过纠正处理,将背坡森林区域中的农田进行纠正,以提高背坡森林区域分类结果的准确性。对于背坡森林区域检测与纠正处理的过程如图7所示:
[0142]
步骤s431,通过所述预处理后的sar图像,选取第一时相vv极化图像和第二时相vv极化图像;
[0143]
步骤s432,基于所述sar图像的第一次地物分类结果、所述第一时相vv极化图像和第二时相vv极化图像,获取第一时相vv极化农田图像和所述第二时相vv极化农田图像的第二差值图;
[0144]
在本实施例中,第二差值图的获取方式如下:
[0145]
iamge
多时相农田差值
=|iamge
时相1农田vv-iamge
时相2农田vv
|
[0146]
通过将第一时相(时相1)vv极化农田图像的像素值和第二时相(时相2)vv极化农田图像的像素值代入上述公式,即可获得对应的第二差值图。
[0147]
步骤s433,利用基于区域的fcm算法,从所述第二差值图中提取农田二值图和背坡森林二值图;
[0148]
利用基于区域的fcm算法,从第二差值图中提取农田和背坡森林信息,并二值化处理,得到农田和背坡森林二值图,以便纠正图像中的错分类;
[0149]
步骤s434,基于所述农田二值图和背坡森林二值图获取背坡森林连通的邻域农田,利用小连通域去除方法进行处理纠正,得到纠正后的农田和背坡森林区域,并把所述sar图像的第三次地物分类结果图中的纠正的背坡森林区域再次纠正为森林,从而得到sar图像的第四次地物分类结果图。
[0150]
对于背坡森林连通域的邻域农田,利用小连通域去除方法去除杂质,当满足下式时,背坡森林连通域纠正为农田,否则邻域农田全部纠正为背坡森林,以获取最终农田和背坡森林区域;
[0151][0152]
式中,r为背坡森林连通域,m是背坡森林连通域编号,为编号为m背坡森林连通域的邻域农田集合。
[0153]
步骤s44,迎坡农田区域检测与纠正;
[0154]
迎坡收缩会导致收缩区域回波能量相对集中,导致收缩区域地物的后向散射系数比实际的值大;会造成森林与迎坡农田区域的误划分,因此,在本申请实施例中,需要对迎坡农田区域进行检测,并通过纠正处理,将迎坡农田区域中的农田进行纠正,以提高迎坡农田分类结果的准确性。对于迎坡农田区域检测与纠正处理的过程如图8所示:
[0155]
步骤s441,通过所述预处理后的sar图像,选取第三时相vv极化图像;
[0156]
步骤s442,对所述第三时相vv极化图像做分类处理;所述分类方法是改进的ogmrf-rc;
[0157]
步骤s443,将第三时相vv极化图像做分类处理结果中背坡森林区域进行纠正,获取农田信息;并进行二值化处理得到第三时相农田二值图;
[0158]
在本步骤中,处理方式与步骤s43中的相同,从第三时相vv极化图做分类处理结果中检测背坡森林区域并纠正,以获取第三时相的vv极化sar图像的农田信息;
[0159]
步骤s444,将第一时相农田二值图和第三时相农田二值图合并,将合并后的农田信息,作为农田的分类结果;
[0160]
农田信息的处理为:
[0161]
image
多时相农田合并
=image
时相1农田
+image
时相3农田
[0162]
步骤s445,依据所述农田的分类结果,在sar图像的第四地物分类结果图中,将迎坡农田区域纠正为农田,得到sar图像的第五地物分类结果图,所述sar图像的第五地物分类结果图为sar图像的最终地物分类结果图。
[0163]
通过本申请中进一步对迎坡农田区域的检测与纠正,能够进一步提高分类结果的精度。
[0164]
装置实施例:
[0165]
划分装置包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器在执行所述计算机程序时实现上述方法的步骤。方法步骤的内容已在方法实施例中介绍,此处不再一一进行赘述。
[0166]
为了验证本申请的内容,结合以下具体案例进行分析验证。以哨兵卫星拍摄的丹江口水库周边地区的slc-sar图像为例,图像分辨率为20米,选取的图像时间范围为2019年5月1日-2020年5月7日,共31张时间序列sar图像。
[0167]
图9为预处理后的sar图像在不同时相、不同极化方式下的图像;图9(a)-(d)分别为预处理后的第一时相vv极化图像、第一时相vh极化图像、第二时相vv极化图像、第三时相vv极化图像,这三个时相分别为2020年04月25日、2019年08月17日、2020年03月20日;即图9(a)为2020年04月25日vv极化图像,图9(b)为2020年04月25日vh极化图像;图9(c)为2019年08月17日vv极化图像;图9(d)为2020年03月20日vv极化图像。
[0168]
图10(a)为选取地物样本后得到的vv极化地物的时间序列后向散射系数变化图;图10(b)分别为选取地物样本后得到的vh极化地物的时间序列后向散射系数变化图;
[0169]
图11为第一次地物分类结果图,分类结果图中的一些复杂地形区域的地物发生了错分,具体包括叠掩、阴影、背坡森林、迎坡农田区域的地物错分。
[0170]
图12为叠掩区域检测与纠正的结果展示,具体的图12(a)为纠正前的叠掩二值图,图12(b)为纠正前的建筑二值图,图12(c)为叠掩区域地物纠正后的分类结果图,从结果中可以看出叠掩区域错分地物得到了有效纠正。
[0171]
图13为阴影区域检测与纠正的结果展示,具体的,图13(a)为纠正前的阴影二值图,图13(b)为纠正前的水域二值图,图13(c)阴影区域纠正后的分类结果图,从结果中可以看出阴影区域错分地物得到了有效纠正。
[0172]
图14为背坡森林区域检测与纠正的结果展示,具体的,图14(a)为纠正前的背坡森林二值图,图14(b)为纠正前的农田二值图,图14(c)为背坡森林区域纠正后的分类结果图,从结果中可以看出背坡森林区域错分地物得到了有效纠正。
[0173]
图15为迎坡农田区域检测与纠正的结果展示,图15(a)为迎坡农田二值图,图15(b)为最终农田区域二值图,图15(c)为纠正后的最终分类结果,从结果中可以看出迎坡农田区域错分地物得到了有效纠正。
[0174]
综上所述,通过最终分类结果可知,本发明提供的基于sar图像地物分类能够对复杂地形sar图像地物分类方法是实际有效的、精准。
[0175]
以上所述仅为本发明的优选实施例,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1