一种适用于轨道检测的影像分析系统、方法和装置与流程
1.本发明总体上涉及一种适用于轨道检测的影像分析系统,其方法和装置。
背景技术:
2.铁路经过长期运营,轨道位置会慢慢发生变化。当变化超过到其临界点时,轨道空间位置的变化会加速。若不采用适当的检测手段及时对其进行整正,不但会影响旅客乘车舒适度,严重时可能危害到列车的行车安全。但传统轨道检测多依靠人工或者轨道检测车,检测的成本比较高。而且,传统人工检测轨道方法常常是两三个月一次,效率较低,如果检测不及时会存在很大的风险。因此,如何对铁路既有线路的几何状态进行快速检测,以便及时对铁路路线进行必要的修整是铁路养护最重要的课题。
3.图像处理技术提供了一种的轨道诊断工具,可以在列车运营的同事进行较为密集的轨道检查,可以筛选危险路段进行进一步的现场查看和维修。基于图像处理的检测手段在机械等领域得到了快速的发展,目前也有针对桥梁位移检测的图像处理手段和方法。但现有的图像处理手段对摄像镜头精度和与被测物体的观测视角有很大的限制,因此难以应用于处理长距离轨道的动态位移检测。但是,列车转弯、沉浮以及点头等运动对图像法轨道检测产生巨大影响,而且单机影像无法对检测轨道进行三维空间坐标定位,这都大大影响了轨道检测结果的准确性和精度。
技术实现要素:
4.鉴于现有技术中的上述问题,为解决上述这些问题的全部或至少一者提出了本发明。
5.根据本发明的一方面,提供一种适用于轨道检测的影像分析方法,所述方法包括:图像提取步骤,从包括轨道交通车辆通过的轨道的图像中,选择包括直线轨道段的图像作为要开始进行影像分析的图像;影像定位步骤,在所选择的图像中选择一个直线轨道段,然后在包括所述直线轨道段的图像中设置轨道坐标系和车辆坐标系,所述轨道坐标系和所述车辆坐标系平行,其中所述轨道坐标系为:所述直线轨道段对应的钢轨为x轴,轨枕为y轴,z轴垂直于x轴和y轴;几何判定步骤,在所述轨道坐标系中,在轨道的路线上选择任意一点m,采用割线支距法计算的该点的曲率称为视曲率;并且选择一点n,由m点和n点采用双点观测法计算当前时刻的曲率;以及轨道分析步骤,根据所计算出的所述视曲率和所计算出的当前时刻的曲率的差值,来判断所述轨道的状态。
6.根据本发明的另一方面,提供一种适用于轨道检测的影像分析系统,所述系统包括:影像采集单元,其设置于轨道交通车辆上,以对轨道交通车辆通过轨道时该轨道的影像进行采集;以及处理单元,其对所采集的影像进行处理,以判断所述轨道的状态,所述处理单元包括:图像提取模块,被构造为从包括所述轨道交通车辆通过的轨道的图像中,选择包括直线轨道段的图像作为要开始进行影像分析的图像;影像定位模块,被构造为在所选择的图像中选择一个直线轨道段,然后在包括所述直线轨道段的图像中设置轨道坐标系和车
辆坐标系,所述轨道坐标系和所述车辆坐标系平行,其中所述轨道坐标系为:所述直线轨道段对应的钢轨为x轴,轨枕为y轴,z轴垂直于x轴和y轴;几何判定模块,被构造为在所述轨道坐标系中,在轨道的路线上选择任意一点m,采用割线支距法计算的该点的曲率称为视曲率;并且选择一点n,由m点和n点采用双点观测法计算当前时刻的曲率;以及轨道分析模块,被构造为根据所计算出的所述视曲率和所计算出的当前时刻的曲率的差值,来判断所述轨道的状态。
7.根据本发明的再一方面,提供一种适用于轨道检测的影像分析装置,所述装置包括:图像提取模块,其被构造为从包括轨道交通车辆通过的轨道的图像中,选择包括直线轨道段的图像作为要开始进行影像分析的图像;影像定位模块,被构造为在所选择的图像中选择一个直线轨道段,然后在包括所述直线轨道段的图像中设置轨道坐标系和车辆坐标系,所述轨道坐标系和所述车辆坐标系平行,其中所述轨道坐标系为:所述直线轨道段对应的钢轨为x轴,轨枕为y轴,z轴垂直于x轴和y轴;几何判定模块,被构造为在所述轨道坐标系中,在轨道的路线上选择任意一点m,采用割线支距法计算的该点的曲率称为视曲率;并且选择一点n,由m点和n点采用双点观测法计算当前时刻的曲率;以及轨道分析模块,被构造为根据所计算出的所述视曲率和所计算出的当前时刻的曲率的差值,来判断所述轨道的状态。
8.本发明提供了一种有效的图像处理系统和方法对列车行车记录仪中的影像进行分析,以快速检测运营轨道的动态响应。
附图说明
9.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术中记载的一些实施例,而对于本领域或普通技术人员来讲并非限制。
10.图1例示了本发明中轨道检测影像分析系统的示例的结构图。
11.图2例示了本发明中轨道检测影像分析系统的影像采集单元的安装位置。
12.图3例示了本发明中的处理单元的模块图。
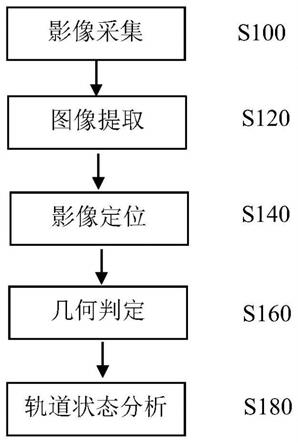
13.图4例示了本发明中轨道检测的影像分析方法的流程图。
14.图5例示了本发明中轨道几何特征提取的曲线与割线支距法。
15.图6例示了本发明中轨道状态分析的双观测方法。
具体实施方式
16.在下文中将参照附图详细地描述本发明的实施例。应当理解,下述实施例并不意图限制本发明,并且,关于根据本发明的解决问题的手段,并不一定需要根据下述实施例描述的各方面的全部组合。为简化起见,对相同的结构部分或者步骤,使用了相同的标记或标号,并且省略其说明。
17.轨道检测影像分析系统
18.附体1例示了本发明的轨道检测影像分析系统的示例。轨道检测影像分析系统包括:影像采集单元、输出单元以及处理单元。
19.该影像采集单元设置于轨道交通车辆上,以对所述车辆行驶时轨道的影像进行采
集。举例来说,轨道交通车辆为火车,轨道为火车钢轨,影像采集单元可以是设置在火车上的行车记录仪101。
20.输出单元,将由所述影像采集单元采集的影像输入所述处理单元。输出单元的示例为视频采集卡102,其将该行车记录仪采集的影像传输到处理单元。可选地,该输出单元可以与处理单元或影像采集单元一体地形成,而不必设置独立于处理单元/影像采集单元的输出单元。
21.处理单元,对所采集的影像进行处理,以判断所述轨道的状态。行车记录仪的示例包括pc机103,微处理器、平板电脑、云处理器等等。在本实施例中以处理单元为pc机为例来进行说明。
22.行车记录仪101被设置于火车上,其用于实时地采集火车行驶过程中前方的图像,如图2所示。行车记录仪所采集的图像被传送到视频采集卡102,并通过视频采集卡102被传输给pc机103,以进行处理和分析。
23.如图3所示,处理单元103可以包括以下模块中的一个或多个:图像提取模块310、校准模块320、影像定位模块330、几何判定模块340和轨道分析模块350。各模块进行的处理在后文中结合轨道检测影像分析的方法来具体说明。
24.轨道检测影像分析方法
25.本发明的影像分析方法的示例可以结合附图4来说明。
26.步骤s100:采集轨道交通车辆通过轨道时该轨道的视频信号,将视频信号转为图像数据存储。
27.例如,行车记录仪101采集火车通过钢轨时的视频信号,并将该视频信号转换为图像来进行存储。
28.步骤s120:从包括轨道交通车辆要通过的轨道的图像中,选择包括直线轨道段的图像作为要开始进行影像分析的图像。
29.例如,在行车记录仪101所采集的视频信号中的图像中,选择包括直线轨道段的图像,以进行后续的图像分析。
30.步骤s140:在所选择的图像中选择一个直线轨道段,然后在包括所述直线轨道段的图像中设置轨道坐标系和车辆坐标系,该轨道坐标系和该车辆坐标系平行,其中该轨道坐标系为:该直线轨道段对应的钢轨为x轴,轨枕为y轴,z轴垂直于x轴和y轴。
31.例如,选择火车的钢轨所在的平面为轨道坐标系的z轴和y轴所形成的平面,而选择行车记录仪101在水平方向上所处的平面作为车辆坐标系。这两个坐标系平行,且间隔一定距离。
32.可选地,在步骤s140之后可以进行校准步骤,通过在轨道坐标系中截取两个平行的轨道之间的直线段,输入其实际的轨距,来进行两个坐标系的校准。
33.步骤s160:几何判定步骤,在所述轨道坐标系中,在轨道的路线上选择任意一点m,采用割线支距法计算的该点的曲率称为视曲率,即动态实时曲率。并且选择一点n,由m点和n点采用双点观测法计算当前时刻的曲率。
34.以下结合图5来具体说明进行几何判定的过程。
35.如图5所示,采用曲线与割线支距法进行轨道几何的判断。当轨道坐标系和车辆坐标系之间无相对运动时,图5的曲线1为轨道的方向,直线2为轮轴方向,其中b点表示轨道的
线路与y轴的交点,其坐标为(0,yb)。c表示轨道的线路与x轴的交点到原点的距离。由勾股定理可得以下公式1和2:
[0036][0037][0038]
其中,c是曲线与x轴的交点在x轴上的坐标值。r是曲线的半径。由以上公式相减可以得到以下公式3:
[0039][0040]
由此可以得到曲线的曲率以下公式4表示:
[0041][0042]
当车辆与轨道之间有横移、浮沉、测滚、摇头及点头等相对运动时,从车厢上观测到的钢轨就会跟着移动或旋转,如图6所示,观测点m点位置与原先观察到的位置会有不同,影像上的钢轨线形也会被扭曲,在影像上所看到的曲线本发明中称之为视曲线,视曲线不但位置会变化,曲率也会变,也就是按上式所量测得的曲率为视曲率,视曲率并非实际的曲率。不论是视曲线还是视曲率对测量来说都存在如何消除车辆的摆动这一大难题。为消除此问题,本发明提出了双观测点的方案。
[0043]
采用双观测点的方法,能够消除车辆摆动引起的相对位移,并且可以计算车辆与轨道的运动的一致度。
[0044]
图6示出了双观测的示意图,图上n点是另一个观测点,比照以上方式,即
[0045][0046][0047][0048]
同样可得出两观测点的支距与曲率关系如下公式5:
[0049][0050]
当由两种方式得到的曲率相等,则车辆和轨道之间没有相对运动。如不相等,则车辆和轨道之间则产生了相对运动,其相对运动值为两者之差。
[0051]
步骤s180:根据轨道的路线在轨道坐标系中的曲率以及轨道的路线在车辆坐标系中的曲率来判断轨道的状态。
[0052]
具体来说,定义车辆坐标系和轨道坐标系的差别为轮轨密合度为λ由以下公式6来表示,轮轨密合度λ越大则表示车辆出轨的风险越大:
[0053][0054]
其中,t为曲率估算时间,即估算曲率所需要的时间,例如以车辆行驶预定长度(例
如轨道长200m)时所对应的时间来作为该曲率估算时间,w为标准曲率,在本发明中,将xm为预定值(例如为4cm)时m点的对应的曲率设定为标准曲率。κ1和κ2分别为轨道的路线在轨道坐标系中和在车辆坐标系中的曲率。
[0055]
轮轨密合度作为一个指标衡量车辆和轨道之间的相对运动,如果其值很大,则表示列车有脱轨的风险,以此来评判轨道的状态。当车厢相对于轨道不摆动时,曲率曲线特征等于路线偏心值。因此该方法利用割线外的支距值,表示曲线的曲率。
[0056]
在本发明的影像分析方法采用曲线与割线支距法,以弧曲线的割线作为轨道坐标的基准,割线的两端为列车转向架的位置。以割线为基准的轨道坐标系,即使轨道有超高或割线介于曲线与直线间,都很容易定义。由于轨道是以车辆为基准的相对轨道变化(如轨道检测车),并非轨道相对于大地坐标的变化,因此割线坐标系可以很清楚说明车辆与轨道间的相对位移,可以规避定义多个轨道坐标系的操作。
[0057]
在本发明的影像分析系统中,可以同时可通过定义轨道、车辆与视角坐标系来规避由于不同影像视角带来的分析误差。
[0058]
本发明的所述影像分析方法包括影像的读取、影像中列车和轨道和坐标定位、轨道几何的判定以及轨道状态的分析。其中,轨道几何的判定包括轨道上特定点或线的位移判定,还可以包括对于行车方向平行的构造物的几何形状进行判定,以及对两组不同时间的照片判定其影像位置及数值差距的变化。
[0059]
另外,本发明的影像分析以动态影像测量的方式,测量车轨相对位移,实地量测车轨间在不同营运车辆运转下的相对动态位移,提供沿线轨道不平顺度。本发明的影像分析软件可同时进行轨道环境,包括破损、扣件丢失、积水等常规检查,以及车辆异常或出轨的分析评估。
[0060]
轨道检测影像分析装置
[0061]
本发明的轨道检测影像分析装置所述装置包括:图像提取模块、影像定位模块、几何判定模块,以及轨道分析模块。其中以上各个模块的构造与影像分析装置中的处理单元所对应的各个模块类似,在此不再赘述。
[0062]
根据本发明的轨道检测影像分析,能够降低轨道检测成本,提高轨道检测效率,消除了由于列车转弯、沉浮以及点头等运动对图像法轨道检测产生的巨大影响,并且能够利用单机影像对检测轨道进行三维空间坐标定位。相对于现有技术具有突出的技术效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1