基于相机参数调节的光伏缺陷特征采集方法与系统与流程
[0001]
本发明涉及人工智能技术领域,具体涉及一种基于相机参数调节的光伏缺陷特征采集方法与系统。
背景技术:
[0002]
当前,全球经济迅速发展,世界各国对能源的需求量也是越来越大。在光伏产业中,太阳能作为一种清洁能源,越来越受到重视。光伏电站一般所处环境比较空旷、恶劣,由于长期的室外工作,不可避免的会使光伏组件会出现一些外部裂痕等缺陷,因此对光伏组件的运行与维护也成了光伏产业中最重要的一部分。
[0003]
现阶段中,为了获得高精度、完整且缺陷明显的光伏组件图像,需要排除复杂的工况环境,通过人工进行图像选择或采用多方法感知来获得不同的图像,但是人工采集不仅耗时耗力,而且不能质量保证。
技术实现要素:
[0004]
为了解决上述技术问题,本发明的目的在于提供一种基于相机参数调节的光伏缺陷特征采集方法与系统,所采用的技术方案具体如下:
[0005]
第一方面,本发明一个实施例提供了一种基于相机参数调节的光伏缺陷特征采集方法,该方法包括以下步骤:
[0006]
利用图像采集设备采集光伏电池组件的初始图像;
[0007]
将所述初始图像经过预处理得到去除纹理的背景图像;
[0008]
对所述背景图像进行缺陷提取和缺陷分析,得到颜色异常缺陷特征和当前特征明显程度obv,所述颜色异常缺陷特征包括背景差异度diff、颜色缺陷的像素点总数sum、最小外接矩形box以及颜色缺陷的hsv参数;
[0009]
利用映射模型并结合特征明显程度对应表调整所述图像采集设备的参数,所述特征明显程度对应表为预设的特征明显程度和颜色异常缺陷特征之间的对应关系;
[0010]
所述映射模型为:
[0011][0012][0013][0014]
其中,f为所述图像采集设备的焦距;aug为所述图像采集设备的放大倍数;res为所述图像采集设备的分辨率;m为所述图像采集设备自身的100万像素;k
1
,k
2
均为常数;(x
1
,y
1
)为所述最小外接矩形box中左上点坐标;(x
2
,y
2
)为所述最小外接矩形box中右下点坐标。
[0015]
所述背景差异度diff的获取方法为对色度差异伪色彩图像中的所有像素点进行求和,利用差异度分析公式处理得到;所述色度差异伪色彩图像为颜色缺陷与所述背景图
像之间的色度差异图。
[0016]
所述当前特征明显程度obv,包括:
[0017]
将所述背景差异度diff、所述颜色缺陷的像素点总数sum、所述最小外接矩形box以及所述颜色缺陷的hsv参数输入特征明显程度分析公式,得到所述当前特征明显程度obv,所述特征明显程度分析公式为:
[0018][0019][0020]
其中,l为颜色缺陷的数量;k为第k个颜色缺陷;h
0
为所述背景图像的背景色度;val为所述色度差异伪色彩图像的所有像素点之和;n、m为所述色度差异伪色彩图像的行数与列数;h
ij
为所述色度差异伪色彩图像中i行j列处像素点的背景色度。
[0021]
所述调整所述图像采集设备的参数,包括:
[0022]
利用所述映射模型,自动调整所述图像设备的参数使得所述当前特征明显程度obv大于等于90%。
[0023]
第二方面,本发明另一个实施例提供了一种基于相机参数调节的光伏缺陷特征采集系统,该系统包括:
[0024]
图像采集单元,用于利用图像采集设备采集光伏电池组件的初始图像;
[0025]
图像预处理单元,用于将所述初始图像经过预处理得到去除纹理的背景图像;
[0026]
缺陷特征检测单元,用于对所述背景图像进行缺陷提取和缺陷分析,得到颜色异常缺陷特征和当前特征明显程度obv,所述颜色异常缺陷特征包括背景差异度diff、颜色缺陷的像素点总数sum、最小外接矩形box以及颜色缺陷的hsv参数;
[0027]
调整单元,用于利用映射模型并结合特征明显程度对应表调整所述图像采集设备的参数,所述特征明显程度对应表为预设的特征明显程度和颜色异常缺陷特征之间的对应关系;
[0028]
所述映射模型为:
[0029][0030][0031][0032]
其中,f为所述图像采集设备的焦距;aug为所述图像采集设备的放大倍数;res为所述图像采集设备的分辨率;m为所述图像采集设备自身的100万像素;k
1
,k
2
均为常数;(x
1
,y
1
)为所述最小外接矩形box中左上点坐标;(x
2
,y
2
)为所述最小外接矩形box中右下点坐标。
[0033]
所述缺陷特征检测单元中所述背景差异度diff的获取,包括:
[0034]
对色度差异伪色彩图像中的所有像素点进行求和,利用差异度分析公式处理得到;所述色度差异伪色彩图像为颜色缺陷与所述背景图像之间的色度差异图。
[0035]
所述缺陷特征检测单元中所述当前特征明显程度obv,包括:
[0036]
将所述背景差异度diff、所述颜色缺陷的像素点总数sum、所述最小外接矩形box以及所述颜色缺陷的hsv参数输入特征明显程度分析公式,得到所述当前特征明显程度obv,所述特征明显程度分析公式为:
[0037][0038][0039]
其中,l为颜色缺陷的数量;k为第k个颜色缺陷;h
0
为所述背景图像的背景色度;val为所述色度差异伪色彩图像的所有像素点之和;n、m为所述色度差异伪色彩图像的行数与列数;h
ij
为所述色度差异伪色彩图像中i行j列处像素点的背景色度。
[0040]
所述调整单元,包括:
[0041]
利用所述映射模型,自动调整所述图像设备的参数使得所述当前特征明显程度obv大于等于90%。
[0042]
本发明实施例至少有如下有益效果:本发明实施例对采集的图像进行缺陷提取和缺陷分析,得到的颜色异常缺陷特征和特征明显程度obv,并利用映射模型,自适应调整图像采集设备的参数,能够获得高清晰度缺陷图像。
附图说明
[0043]
为了更清楚地说明本发明实施例或现有技术中的技术方案和优点,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
[0044]
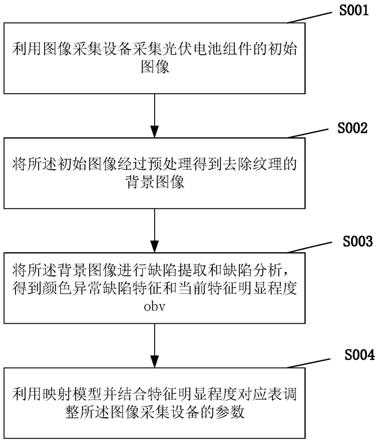
图1为本发明一个实施例所提供的一种基于相机参数调节的光伏缺陷特征采集方法的流程图;
[0045]
图2为本发明一个实施例所提供的一种基于相机参数调节的光伏缺陷特征采集方法的步骤流程图;
[0046]
图3为本发明另一个实施例所提供的一种基于相机参数调节的光伏缺陷特征采集系统的结构框图。
具体实施方式
[0047]
为了更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明提出的一种基于相机参数调节的光伏缺陷特征采集方法与系统,其具体实施方式、结构、特征及其功效,详细说明如下。在下述说明中,不同的“一个实施例”或“另一个实施例”指的不一定是同一实施例。此外,一或多个实施例中的特定特征、结构、或特点可由任何合适形式组合。
[0048]
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。
[0049]
下面结合附图具体的说明本发明所提供的一种基于相机参数调节的光伏缺陷特征采集方法与系统的具体方案。
[0050]
参见附图1和附图2,本发明实施例提供了一种基于相机参数调节的光伏缺陷特征采集方法,该方法具体包括如下步骤:
[0051]
步骤s001,利用图像采集设备采集光伏电池组件的初始图像。
[0052]
步骤s002,将初始图像经过预处理得到去除纹理的背景图像。
[0053]
步骤s003,对背景图像进行缺陷提取和缺陷分析,得到颜色异常缺陷特征和当前特征明显程度obv。
[0054]
步骤s004,利用映射模型并结合特征明显程度对应表调整图像采集设备的参数。
[0055]
进一步地,步骤s001中,本发明实施例利用能调节高度和相机参数的rgb相机采集光伏电池组件图像,固定相机位置,采用俯视角度从高位置拍摄,其拍摄范围可覆盖若干个光伏组件,并采用光照均匀的led灯作为补光光源。
[0056]
需要说明的是,图像采集设备可以选择相机、摄像机等一切能调节高度和设备参数的图像采集设备。
[0057]
进一步地,步骤s002中,将光伏电池组件图像经过预处理,能够去除电池板的细栅线、横向和纵向的焊带,得到去除纹理的光伏电池组件图像,其具体方法步骤如下:
[0058]
1)利用形态学算子结构对光伏电池组件图像进行闭运算,去除电池板栅线,得到去除栅线的图像,且形态学算子结构采用为模板,分别构成最大值与最小值滤波器来进行闭运算。
[0059]
2)利用霍夫变换拟合出去除栅线的图像中的直线,并将光伏电池组件图像和去除栅线的图像相减后进行腐蚀处理,得到去除纹理的背景图像。
[0060]
进一步地,步骤s003中,将rgb相机采集的rgb彩色空间图像转换成hsv彩色空间图像,求得背景图像的平均色度h
avg
,并根据每一个像素点的分布得到色度直方图,且色度直方图的定义域为色度分布0~360,值域为像素点数。取色度直方图中的最大值,得到色度的众数h
max
,根据上述的平均色度h
avg
和色度的众数h
max
代入公式中得到背景图像中电池板的背景色度,公式为:
[0061][0062]
将正常的光伏电池组件图像的色相作为模板,对背景图像进行色相归一化处理,过程为:所有像素点的背景色度同时减去正常的光伏电池组件图像的背景色度并取绝对值防止溢出,即缺陷部分会与正常的光伏电池组件图像产生较大的反差,得到色相归一化图像。
[0063]
采用自适应阈值分割的方法对色相归一化图像进行二值化处理得到含有颜色缺陷的模板。二值化过程为:通过分析像素点邻域内的高斯均值,确定邻域内的阈值,然后与剩余像素点进行对比,将大于阈值的像素点置1,小于阈值的像素点置0。
[0064]
将含有颜色缺陷的模板与背景图像相乘,得到缺陷分割图。根据缺陷分割图,统计
颜色缺陷的像素点总数sum,以及每个颜色缺陷的最小外接矩形box,同时提取出颜色缺陷的hsv参数和背景差异度等,进行缺陷特征明显程度分析。
[0065]
进一步地,背景差异度的具体方法为:根据色相归一化图像与含有颜色缺陷的模板相乘后得到颜色缺陷与背景图像的色度差异伪色彩图像。对色度差异伪色彩图像的所有像素点进行求和,代入差异度分析公式中得到背景差异度diff,则差异度分析公式为:
[0066][0067]
其中,n、m为色度差异伪色彩图像的行数与列数;h
ij
为色度差异伪色彩图像中i行j列处像素的背景色度。
[0068]
将背景差异度diff、颜色缺陷的像素点总数sum、最小外接矩形box以及颜色缺陷的hsv参数等输入特征明显程度分析公式中,得到特征明显程度obv,即光伏电池组件中缺陷的明显程度,则特征明显程度分析公式为:
[0069][0070][0071]
其中,l为颜色缺陷的数量;k为第k个颜色缺陷;val指色度差异伪色彩图像的所有像素点之和。需要说明的是,通过结合多种颜色缺陷参数和上述方法,可以提高特征明显程度分析的鲁棒性。进一步地,考虑rgb相机可调节参数有:相机位姿角度(θ
x
,θ
y
,θ
z
)、焦距f、放大倍数aug以及分辨率res,且由相机参数与颜色缺陷特征的相关性可知:颜色缺陷的像素点总数sum、最小外接矩形box与焦距f和放大倍数aug成线性关系;背景差异度diff与分辨率res成非线性,但具有相关性。
[0072]
因此根据上述关系,建立rgb相机参数与颜色缺陷特征的映射模型,所述映射模型为:
[0073][0074]
其中,k
1
、k
2
均为待定系数,由系数拟合得到;m为rgb相机自身的100万像素;(x
1
,y
1
)为最小外接矩形box中左上点坐标;(x
2
,y
2
)为最小外接矩形box中右下点坐标。
[0075]
进一步地,系数拟合的过程为:结合rgb相机采集时的相机参数和检测到的颜色异常缺陷特征,利用上述映射模型关系,建立多组的多方程公式,进而求得k
1
和k
2
的取值。
[0076]
进一步地,步骤s004中,利用映射模型,调整rgb相机的参数,其具体过程如下:
[0077]
1)预分析颜色异常缺陷特征与特征明显程度obv的关系,绘制特征明显程度对应表;
[0078]
2)将采集的光伏电池组件图像利用机器视觉得到颜色异常缺陷特征;
[0079]
3)根据颜色异常缺陷特征,得到特征明显程度obv
0
;
[0080]
4)结合特征明显程度对应表中对应的颜色异常缺陷特征,利用映射模型,自动调整相机参数使得特征明显程度obv
0
大于等于90%。
[0081]
需要说明的是,绘制特征明显程度对应表的目的是为了提前获取颜色异常缺陷特征与特征明显程度obv的对应关系,便于利用特征明显程度对应表的数据,调整相机参数。
[0082]
综上所述,本发明实施例提供了一种基于相机参数调节的光伏缺陷特征采集方法,该方法包括通过rgb相机采集的光伏电池组件图像,经过预处理得到去除纹理的背景图像,对背景图像进行缺陷提取和缺陷分析,得到颜色异常缺陷特征和特征明显程度obv,利用映射模型并结合特征明显程度对应表,自适应地调整rgb相机参数。利用这样的方法能够自动调整rgb相机参数,进一步能够采集对比度大、清晰度高的带有缺陷的光伏电池组件图像,且达到了缺陷特征提取的自动化目的。
[0083]
基于与上述方法相同的发明构思,本发明实施例还提供了一种基于相机参数调节的光伏缺陷特征采集系统。
[0084]
参见附图3,本发明实施例提供了一种基于相机参数调节的光伏缺陷特征采集系统,该系统包括:图像采集单元10、图像预处理单元20、缺陷特征检测单元30、以及调整单元40。
[0085]
图像采集单元10用于利用rgb相机采集光伏电池组件的初始图像;图像预处理单元20用于将初始图像经过预处理得到去除纹理的背景图像;缺陷特征检测单元30用于对背景图像进行缺陷提取和缺陷分析,得到颜色异常缺陷特征和当前特征明显程度obv,颜色异常缺陷特征包括背景差异度diff、颜色缺陷的像素点总数sum、最小外接矩形box以及颜色缺陷的hsv参数;调整单元40用于利用映射模型并结合特征明显程度对应表调整rgb相机的参数,特征明显程度对应表为预设的特征明显程度和颜色异常缺陷特征之间的对应关系。
[0086]
映射模型为:
[0087][0088][0089][0090]
其中,f为rgb相机的焦距;aug为rgb相机的放大倍数;res为rgb相机的分辨率;m为rgb相机自身的100万像素;k
1
,k
2
均为常数;(x
1
,y
1
)为最小外接矩形box中左上点坐标;(x
2
,y
2
)为最小外接矩形box中右下点坐标。
[0091]
进一步地,缺陷特征检测单元包括:
[0092]
背景差异度diff的获取方法为对色度差异伪色彩图像中的所有像素点进行求和,利用差异度分析公式处理得到;色度差异伪色彩图像为颜色缺陷与背景图像之间的色度差异图。
[0093]
当前特征明显程度obv为:
[0094]
将背景差异度diff、颜色缺陷的像素点总数sum、最小外接矩形box以及颜色缺陷的hsv参数输入特征明显程度分析公式,得到当前特征明显程度pbv,特征明显程度分析公式为:
[0095][0096][0097]
其中,l为颜色缺陷的数量;k为第k个颜色缺陷;h
0
为背景图像的背景色度;val为色度差异伪色彩图像的所有像素点之和;n、m为色度差异伪色彩图像的行数与列数;h
ij
为色度差异伪色彩图像中i行j列处像素的背景色度。
[0098]
进一步地,调整单元40包括利用映射模型,自动调整rgb相机的参数使得当前特征明显程度obv大于等于90%。
[0099]
综上所述,本发明实施例提供了一种基于相机参数调节的光伏缺陷特征采集系统,该系统包括图像采集单元10、图像预处理单元20、缺陷特征检测单元30以及调整单元40。将图像采集模块10利用rgb相机采集的光伏电池组件图像,经过图像预处理模块20得到去除纹理的背景图像,将背景图像通过缺陷特征检测单元30得到颜色异常缺陷特征和特征明显程度obv,利用映射模型并结合特征明显程度对应表,自适应地调整rgb相机参数。这样的系统能够自动调整rgb相机参数,进一步能够采集对比度大、清晰度高的带有缺陷的光伏电池组件图像,且达到了缺陷特征提取的自动化目的。
[0100]
需要说明的是:上述本发明实施例先后顺序仅仅为了描述,不代表实施例的优劣。且上述对本说明书特定实施例进行了描述。其它实施例在所附权利要求书的范围内。在一些情况下,在权利要求书中记载的动作或步骤可以按照不同于实施例中的顺序来执行并且仍然可以实现期望的结果。另外,在附图中描绘的过程不一定要求示出的特定顺序或者连续顺序才能实现期望的结果。在某些实施方式中,多任务处理和并行处理也是可以的或者可能是有利的。
[0101]
本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。
[0102]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1