一种任意形状均质物体绕任意旋转轴的转动惯量计算方法与流程
[0001]
本发明涉及工程力学技术领域,特别是涉及一种任意形状均质物体绕任意旋转轴的转动惯量计算方法。
背景技术:
[0002]
在旋转动力学中,转动惯量是研究物体旋转运动的重要参数之一,用于建立角动量、角速度、力矩和角加速度等多个变量之间的定量关系,应用于航天、电力、机械、仪表等工业领域。尤其在发动机叶片、飞轮、陀螺以及航天器的外形设计等精密装备方面,精确计算转动惯量十分必要。
[0003]
目前得到物体转动惯量的方法包括两种:简单转动惯量计算方法与实验法。简单转动惯量计算方法只适用于规则形状的均质物体,而对于外形复杂或质量分布不均匀的物体只能通过实验法测量。针对复杂形状均质物体,简单转动惯量计算方法不能解决其质心确定、微元划分与转动惯量求解等问题。王小三等(王小三,刘云平,倪怀生,张宁.转动惯量测量研究的进展及展望[j].宇航计测技术,2019,39(2):1-5.)对转动惯量测量进行了综述,对三线摆法、扭摆法、落体法等转动惯量测量实验法的测量原理及其优缺点进行了总结分析。基于扭摆法的转动惯量测量设备最高测量准确度可达到0.1%,但实验法均需要考虑动力学模型、空气阻尼等的影响,其准确度取决于实验设备,包括:控制系统的准确度、测量系统的准确度、设备承载能力等。因此,实验法测量成本很高,且设备存在最大测量质量或最大测量转动惯量限制。同时,针对复杂形状均质物体,实验法不能实现物体绕任意旋转轴的转动惯量测量。综上可知,建立复杂形状均质物体绕任意旋转轴的转动惯量计算方法,突破简单转动惯量计算方法与实验法的不足,成为旋转动力学中的一项关键技术问题。
技术实现要素:
[0004]
本发明的目的在于克服上述现有技术的缺点和不足,提供一种任意形状均质物体绕任意旋转轴的转动惯量计算方法,即单元叠加法。该方法通过cad软件对任意形状物体进行几何建模,充分利用有限元网格的准确划分、单元信息等特性,对物体进行网格单元划分并建立单元信息数据库,确定单元与旋转轴的相对位置关系,进而得出物体的转动惯量。单元叠加法的核心是计算每个单元的转动惯量,最终通过所有单元的叠加得到物体整体的转动惯量。该方法适用于任意形状均质物体,尤其是复杂形状均质物体,且可绕任意旋转轴,为旋转动力学研究提供有效支持。
[0005]
本发明至少通过如下技术方案之一实现。
[0006]
一种任意形状均质物体绕任意旋转轴的转动惯量计算方法,包括以下步骤:
[0007]
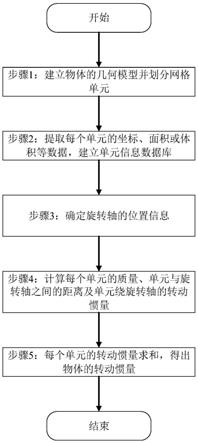
步骤1、建立物体的几何模型并划分网格单元;
[0008]
步骤2、提取每个单元的坐标、面积或体积等数据,建立单元信息数据库;
[0009]
步骤3、确定旋转轴的位置信息;
[0010]
步骤4、计算每个单元的质量、单元与旋转轴之间的距离以及单元绕旋转轴的转动
惯量;
[0011]
步骤5、每个单元的转动惯量求和,得出物体的转动惯量。
[0012]
优选的,步骤1是应用cad软件中建立相应的几何模型。
[0013]
优选的,所述划分网格单元是在ansys有限元软件进行,将物体的几何模型导入ansys有限元软件中,选择单元类型并划分网格单元。
[0014]
优选的,步骤2是利用ansys软件的fortune语言代码提取数据信息。
[0015]
优选的,所述数据信息包括每个单元的坐标、面积或体积数据。
[0016]
优选的,步骤3具体包括:将空间内任意旋转轴表示为截距式方程:
[0017][0018]
式中,(x,y,z)为符合旋转轴方程的任意一点的坐标,(x
l
,y
l
,z
l
)为旋转轴上某点坐标,(i,j,k)为旋转轴的方向向量,t为旋转轴方程的共性变量。
[0019]
优选的,所述单元的质量δm为:
[0020]
δm=ρv
ꢀꢀ
(2)
[0021]
δm=ρδs
ꢀꢀ
(3)
[0022]
式中,ρ为材料密度,v为solid单元的体积,s为shell单元的面积,δ为shell单元的厚度。
[0023]
优选的,每个单元与旋转轴之间的距离为:
[0024][0025][0026]
其中,(x0,y0,z0)为单元坐标,t为旋转轴方程的共性变量,δr为单元与旋转轴之间的距离。
[0027]
优选的,所述单元的转动惯量为:
[0028]
δj=δmδr2ꢀꢀ
(6)。
[0029]
优选的,所述物体的转动惯量为:
[0030]
j=∑δj
ꢀꢀ
(7)。
[0031]
任意旋转轴通过截距式方程实现旋转轴在坐标系中的定位。
[0032]
所述单元叠加法包括网格单元划分、单元的坐标、面积或体积等信息数据库、单元质量计算、单元与旋转轴之间的距离计算、单元的转动惯量计算、每个单元的转动惯量叠加。
[0033]
网格单元划分实现了对几何模型的微元准确划分。
[0034]
所述单元的坐标、面积或体积等信息数据库利用了单元信息特性,可通过有限元软件的fortune语言直接提取单元信息并建立信息库。
[0035]
单元的坐标、面积或体积等信息数据库结合材料密度参数可实现单元质量计算。
[0036]
单元的坐标、面积或体积等信息数据库结合截距式方程可实现单元与旋转轴之间的距离计算。
[0037]
单元质量计算结合单元与旋转轴之间的距离计算可实现单元的转动惯量计算。
[0038]
所述的每个单元的转动惯量叠加是运用转动惯量的定义,最终得出了物体整体的
转动惯量。
[0039]
所述的单元叠加法适用于任意形状均质物体,尤其是复杂形状均质物体,且可绕任意旋转轴,可通过规则均质物体的简单转动惯量计算方法验证其准确性与有效性。
[0040]
本发明通过运用cad软件对任意形状物体建立相应的几何模型,在有限元软件中实现网格单元准确划分,利用单元的信息特性,提取其坐标、面积、体积等参数,进而计算出每个单元的质量、单元与旋转轴之间的距离以及单元绕旋转轴的转动惯量。最后,根据转动惯量的可叠加性,叠加所有单元的转动惯量即可得到任意形状均质物体绕任意旋转轴的转动惯量。单元叠加法的核心是利用有限元网格的准确划分、单元信息等特性,提取所需的单元参数,进而计算每个单元的转动惯量,最终通过所有单元的叠加得到物体整体的转动惯量。该方法能够克服简单转动惯量计算方法中物体质心确定、微元划分与转动惯量求解等问题,避免实验法中依赖实验设备准确度、测量成本很高、存在最大测量限制、不能实现绕任意旋转轴的转动惯量测量等问题,将转动惯量求解问题简化为物体几何模型建模问题。本发明所述的转动惯量计算方法,适用于任意形状均质物体,尤其是复杂形状均质物体,且可绕任意旋转轴,为工程领域中大型设备的转动惯量准确计算提供有效支持。
[0041]
与现有的技术相比,本发明的有益效果为:
[0042]
(1)克服了简单转动惯量计算方法不能解决复杂形状均质物体质心确定、微元划分与转动惯量求解等问题,将转动惯量计算方法的适用范围拓宽到任意形状均质物体;
[0043]
(2)无需通过实验,避免了三线摆法、扭摆法、落体法等转动惯量测量实验法的依赖实验设备准确度、测量成本很高、存在最大测量质量或最大测量转动惯量限制、不能实现物体绕任意旋转轴的转动惯量测量等问题,实现了任意形状均质物体绕任意旋转轴的转动惯量计算;
[0044]
(3)将转动惯量计算问题转化为物体几何建模问题,且计算过程易操作,为工业领域飞轮、航天器等越来越大型的设备绕任意旋转轴的转动惯量计算提供了有效方法。
附图说明
[0045]
图1为实施例涉及转动惯量计算方法(单元叠加法)流程图;
[0046]
图2为实施例复杂形状物体的几何模型示意图;
[0047]
图3为实施例复杂形状物体的有限元单元模型示意图;
[0048]
图4为实施例圆柱壳的几何模型示意图;
[0049]
图5为实施例圆柱体的几何模型示意图;
[0050]
图6为实施例圆盘的几何模型示意图。
具体实施方式
[0051]
为使本发明的技术方案和优点更加清楚,下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚完整的描述。
[0052]
如图1所示的一种任意形状均质物体绕任意旋转轴的转动惯量计算方法,具体包括以下步骤:
[0053]
步骤1、建立物体的几何模型并划分网格单元。在工程实际中,根据物体的几何形状参数或设计图纸,在cad软件中建立相应的几何模型。将物体的几何模型导入ansys有限
元软件中,选择合适的单元类型(实体为solid单元、壳体为shell单元)并划分网格单元,运用有限元软件中网格单元划分的优势,轻松实现物体微元的准确划分。划分的网格单元质量越高、数量越多,最终计算的转动惯量越准确。判断网格单元质量的依据是网格单元尺寸均匀,极大或极小的网格单元少。
[0054]
在实施例中,如图2所示,利用cad软件solidworks建立的齿轮几何模型。将几何模型保存为.x_t格式,并导入ansys有限元软件,选择solid单元类型,并划分网格单元,如图3所示。
[0055]
步骤2、利用ansys软件的fortune语言代码,结合单元自身的信息特性,提取每个单元的坐标、面积或体积等数据,建立单元信息数据库。在有限元软件中,网格单元的划分同时实现了单元位置、面积或体积等信息的确定,而在正常情况下实现这些功能是极其复杂的过程。因此,利用单元自身的信息特性为实现物体微元的质量计算、单元与旋转轴之间的距离计算提供了前提条件。
[0056]
ansys软件的fortune语言代码编写包括:*get命令提取单元总数;*get命令提取最小的单元编号;*dim命令定义单元信息数据库表格;*do命令进行单元数据提取循环,循环次数为单元总数;循环过程中,从最小的单元编号开始循环,*get命令提取对应单元编号的xyz坐标、面积或体积等数据并存储到单元数据库表格中,elnext命令跳转到下一个的单元编号。通过编写代码,可以直接提取每个单元的xyz坐标、面积或体积等数据,建立单元信息数据库。
[0057]
步骤3、确定旋转轴的位置信息。空间内任意旋转轴可表示为截距式方程:
[0058][0059]
式中(x,y,z)为符合旋转轴方程的任意一点的坐标,(x
l
,y
l
,z
l
)为旋转轴上某点坐标,(i,j,k)为旋转轴的方向向量,t为旋转轴方程的共性变量。
[0060]
在实施例中,针对齿轮,选用中心轴z轴作为旋转轴。旋转轴上某点坐标取(0,0,0),方向向量取(0,0,1),则中心轴z轴的方程为:
[0061]
x=y=0
ꢀꢀ
(2)。
[0062]
步骤4、获取每个单元质量到旋转轴的距离及转动惯量,具体为:结合单元信息数据库,通过单元面积或体积计算出单元质量,通过单元坐标计算出与旋转轴之间的距离。单元质量δm的通过公式(3)与公式(4)得到:
[0063]
δm=ρv
ꢀꢀ
(3)
[0064]
δm=ρδs
ꢀꢀ
(4)
[0065]
式中,ρ为材料密度,v为solid单元的体积,s为shell单元的面积,δ为shell单元的厚度。
[0066]
假设单元坐标为(x0,y0,z0),单元与旋转轴之间的距离通过公式(5)与公式(6)得到:
[0067][0068][0069]
通过公式(3)-公式(6),可以得到每个单元的质量δm、每个单元与旋转轴之间的
距离δr。在此基础上,通过公式(7)得到单元的转动惯量:
[0070]
δj=δmδr2ꢀꢀ
(7)
[0071]
单元的质量采用公式(3)得到,单元与旋转轴z轴之间的距离为公式(8)。
[0072][0073]
步骤5、每个单元的转动惯量求和,得出物体的转动惯量。
[0074]
j=∑δj
ꢀꢀ
(9)
[0075]
通过上述5个步骤,即可实现任意形状均质物体绕任意旋转轴的转动惯量计算,尤其是复杂形状均质物体。除了步骤1中的物体几何建模需要在cad软件中实现之外,其余步骤均可通过有限元软件的fortune语言编程实现,整个过程快速、高效。因此,该方法将转动惯量的求解问题转化为物体几何建模问题,而工程结构的设计图纸为几何建模提供了形状参数,且cad软件建模技术也已经非常成熟。
[0076]
因采用复杂形状均质物体——齿轮作为实施例,对该方法的实施进行详细说明。以下将采用规则均质物体——圆柱壳(如图4)、圆柱体(如图5)、圆盘(如图6)作为实施例,对方法的准确性进行验证。圆柱壳、圆柱体、圆盘绕y轴的转动惯量可分别通过公式(9)、公式(10)、公式(11)直接得出。如表1所示,规则均质物体转动惯量的公式求解结果与该方法结果的相对误差极小,充分说明了该方法的准确性与有效性。而且,提高网格单元的质量和数量,可进一步降低相对误差,提高准确性。
[0077][0078][0079][0080]
其中,m表示物体的质量。
[0081]
表1规则均质物体转动惯量的公式求解结果与本发明方法结果的对比
[0082]
[0083][0084]
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1