基于非线性降维与智能寻优的四轴抗干扰无人机系统的制作方法
[0001]
本发明涉及系统抗干扰等领域,特别设计基于非线性降维与智能寻优的四轴抗干扰无人机系统。
背景技术:
[0002]
近年来,随着无人机的日益普及,各级交通运输管理部门将无人机系统应用到应急处置、养护巡检、桥梁健康检测、施工进度检查、交通规划勘察、路域环境整治、路政巡逻等诸多实战场景中,取得了事半功倍的效果。无人机要完成任务除需要飞机及其携带的任务设备外,还需要有地面控制设备、数据通信设备、维护设备,以及指挥控制和必要的操作、维护人员等,较大型的无人机还需要专门的发射/回收装置。无人机系统避障系统的稳健保证了无人机的安全运行,无人机在户外工作的过程中由于物理抖动会造成采集图像出现大量噪声,给无人机安全运行带来巨大干扰。
[0003]
本发明针对无人机的干扰问题,提出基于非线性降维与智能寻优的四轴抗干扰无人机系统,利用非线性降维的去噪能力,并且使用遗传算法(genetic algorithm,ga)对稀疏分解稀疏进行智能寻优,得到高质量的去噪图像。克服了传统抗干扰去噪系统容易造成局部特征丢失的问题。
技术实现要素:
[0004]
为了解决上述存在问题。本发明提出基于非线性降维与智能寻优的四轴抗干扰无人机系统。为达此目的:
[0005]
本发明提出基于非线性降维与智能寻优的四轴抗干扰无人机系统,具体步骤如下,其特征在于:
[0006]
步骤1:初始化图像,把图像均匀分块,分块尺寸为16
×
16,并把每个小块排列为列向量x
i
(256
×
1);
[0007]
步骤2:初始化字典d为dct字典;
[0008]
步骤3:建立ga算法适应度函数f,适应度函数值越小,说明个体越优秀,即越接近全局最优解;
[0009]
步骤4:初始化ga算法种群;
[0010]
步骤5:设计内外双循环的估计原则;
[0011]
步骤6:基因选择操作,结合所有个体的最优索引值,组成新的最优种群个体;
[0012]
步骤7:循环终止条件,当图像的平均信息熵到达特定阈值且重建误差小于误差阈值时,循环终止,输出最优稀疏系数α,否则,重复步骤5-6;
[0013]
步骤8:根据稀疏系数α更新字典d,当满足误差条件时,停止迭代,否则,重复步骤5-8。
[0014]
作为本发明进一步改进,所述步骤3中适应度函数f公式为:
[0015][0016][0017]
y=ψx
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0018]
其中,ψ是高斯测量矩阵,ψ
+
是ψ的广义逆,x是测试图像,y是测量信号,max(
·
)是求最大值。
[0019]
作为本发明进一步改进,所述步骤4初始化种群是基于正交匹配跟踪算法,计算ψ
+
*y并选择m个具有较大数值的索引值作为一个个体p1,然后,去掉已经被选中的索引值,从ψ
+
*y中选择剩余对应的索引中较大的前m个索引值作为一个个体p2,以此类推,得到新的种群个体。
[0020]
作为本发明进一步改进,所述步骤5外循环的估计原则为:
[0021]
1)使用式(1)计算种群适应度,并且保存每个个体中具有最大适应度的索引,使用所有个体最大适应度对应的索引,组成最优个体;
[0022]
2)基于变异概率对种群个体进行变异操作。
[0023]
作为本发明进一步改进,所述步骤5内循环的估计原则为:对种群个体p
i
进行交叉互换,得到新的种群。
[0024]
作为本发明进一步改进,所述步骤7中图像信息熵的计算公式为:
[0025][0026]
其中,p
i
是第i个像素值占所有像素的概率。
[0027]
作为本发明进一步改进,所述步骤8中字典更新的公式为:
[0028][0029]
e
j
≈usv
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0030]
d
j
=u
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0031]
α=sv
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0032]
其中,x
i
是第i个图像块,组成的数据列,α是x
i
在字典d下的系数表达系数,d
l
是字典d的第j列,式(6)是对e
j
作秩为1的奇异值分解。
[0033]
本发明基于非线性降维与智能寻优的四轴抗干扰无人机系统,有益效果在于:
[0034]
1.本发明利用非线性降维,增加了系统的鲁棒性。
[0035]
2.本发明使用ga算法作稀疏优化算法,增大了抗干扰能力。
[0036]
3.本发明算法复杂度低,实时性强。
[0037]
4.本发明硬件系统实现简单,成本低。
附图说明
[0038]
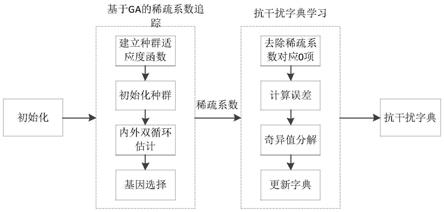
图1系统流程图;
具体实施方式
[0039]
本发明提出基于非线性降维与智能寻优的四轴抗干扰无人机系统。
[0040]
下面结合附图与具体实施方式对本发明进一步描述:
[0041]
本发明提出基于非线性降维与智能寻优的四轴抗干扰无人机系统,如图1所示是系统流程图,具体步骤如下,首先,初始化图像,把图像均匀分块,分块尺寸为16
×
16,并把每个小块排列为列向量x
i
(256
×
1);并且初始化字典d为dct字典。
[0042]
接着,建立ga算法适应度函数f,适应度函数值越小,说明个体越优秀,即越接近全局最优解,初始化ga算法种群,除此之外,设计内外双循环的估计原则和基因选择操作,结合所有个体的最优索引值,组成新的最优种群个体;
[0043]
循环终止条件,当图像的平均信息熵到达特定阈值且重建误差小于误差阈值时,循环终止,输出最优稀疏系数α,否则,重复以上。
[0044]
适应度函数f公式为:
[0045][0046][0047]
y=ψx
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0048]
其中,ψ是高斯测量矩阵,ψ
+
是ψ的广义逆,x是测试图像,y是测量信号,max(
·
)是求最大值。
[0049]
初始化种群是基于正交匹配跟踪算法,计算ψ
+
*y并选择m个具有较大数值的索引值作为一个个体p1,然后,去掉已经被选中的索引值,从ψ
+
*y中选择剩余对应的索引中较大的前m个索引值作为一个个体p2,以此类推,得到新的种群个体。
[0050]
外循环的估计原则为:
[0051]
1)使用式(1)计算种群适应度,并且保存每个个体中具有最大适应度的索引,使用所有个体最大适应度对应的索引,组成最优个体;
[0052]
2)基于变异概率对种群个体进行变异操作。
[0053]
内循环的估计原则为:对种群个体p
i
进行交叉互换,得到新的种群。
[0054]
作为本发明进一步改进,所述步骤7中图像信息熵的计算公式为:
[0055][0056]
其中,p
i
是第i个像素值占所有像素的概率。
[0057]
最后,根据稀疏系数α更新字典d,当满足误差条件时,停止迭代,否则,重复以上步骤。
[0058]
字典更新的公式为:
[0059][0060]
e
j
≈usv
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0061]
d
j
=u
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0062]
α=sv
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0063]
其中,x
i
是第i个图像块,组成的数据列,α是x
i
在字典d下的系数表达系数,d
l
是字典d的第j列,式(6)是对e
j
作秩为1的奇异值分解。
[0064]
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作任何其他形式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1