故障预测方法、装置、终端及存储介质与流程
[0001]
本发明涉及故障处理技术,尤其是指一种故障预测方法、装置、终端及存储介质。
背景技术:
[0002]
ups配合电系统的供电系统被广泛应用于数据中心,以保证数据中心的可靠性。而这一模式的核心设备是ups,而提高ups的可靠性,并不能从根本上解决供电系统的安全性和可靠性。因此,ups已经从单纯的独立电源设备,发展成为具有多种通信方式管理与it系统无缝集成的网络设备。
[0003]
然而,由于新型ups的发展过于快速,整体结构近似于多部件的拼装,有一些部件容易损坏。因此,预估ups的主要器件发生故障的可能性,才能更好地保证这一设备的正常运行。
技术实现要素:
[0004]
本发明所要解决的技术问题是:对目标对象的器件进行预测,估算目标对象的主要器件发生故障的可能性。
[0005]
为了解决上述技术问题,本发明采用的技术方案为:提供一种故障预测方法,包括如下步骤:获取关键部件的多个故障因子及关键部件的多个历史故障时间点;根据关键部件的多个故障因子及关键部件的多个历史故障时间点,应用神经网络进行训练,获取关键部件的预计故障时间;计算关键部件的当前时间与预计故障时间的差值,预测关键部件的故障可能性。
[0006]
进一步地,获取并比较各个所述关键部件的当前时间与所述计故障时间的差值,确定所述目标对象损坏的关键部件。
[0007]
具体的,根据所述目标对象的工况,确定神经网络的隐藏层的层数;
[0008]
应用mlp神经网络进行模型训练,建立所述关键部件的状态评估模型;
[0009]
应用所述关键部件的状态评估模型,计算出关键部件的预计故障时间。
[0010]
进一步地,对所述故障因子的历史参数进行分割,生成训练集数据、验证集数据和测试集数据;
[0011]
对所述训练集数据进行神经网络训练,建立所述关键部件的状态评估模型;
[0012]
应用所述验证集数据,调整所述关键部件的状态评估模型;
[0013]
按照所述测试集数据,验证所述关键部件的状态评估模型。
[0014]
其中,在历史时间段内,实时采集所述关键部件在多个目标对象上的运行数据、维护数据及故障记录;
[0015]
按照所述目标对象的类型,对所述运行数据、维护数据及故障记录进行分类整理,生成所述关键部件特征的历史故障信息;
[0016]
从所述关键部件特征的历史故障信息,选取所述关键部件的多个故障因子及关键部件的多个历史故障时间点;
[0017]
其中,所述运行数据,包括,用户的使用习惯信息、运行模式信息、负载调节信息。
[0018]
具体的,应用主成分分析法,对所述关键部件特征的历史故障信息进行降维处理,生成所述关键部件的多个故障因子。
[0019]
进一步地,按照所述目标对象的类型,对所述运行数据、维护数据及故障记录的格式进行统一;
[0020]
获取格式统一的所述运行数据、维护数据及故障记录的阈值范围,以剔除数据异常点;
[0021]
分别对剔除异常点的运行数据、维护数据及故障记录进行平滑处理,获得目标对象的数据变化趋势。
[0022]
本申请还提供了一种故障预测装置,包括:
[0023]
提取模块,用于获取关键部件的多个故障因子及故障因子的多个历史故障时间点;
[0024]
训练模块,用于根据所述关键部件的多个故障因子及故障因子的多个历史故障时间点,应用神经网络进行训练,获取关键部件的预计故障时间;
[0025]
预测模块,用于计算所述关键部件的当前时间与所述预计故障时间的差值,预测所述关键部件的故障可能性。
[0026]
本申请还提供了一种终端,其包括处理器、存储器和显示器,所述处理器耦接所述存储器、所述显示器,所述存储器上存储有可在所述处理器上执行的计算机程序;所述处理器执行所述计算机程序,实现上述方法。
[0027]
本申请还提供了一种存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现上述的方法中的步骤
[0028]
本发明的有益效果在于:应用神经网络进行训练,可以获取关键部件的预计故障时间,通过分析故障因子,确定关键部件的故障可能性。运用本方法之后,可以将关键部件的特征细化为容易把控的故障因子,对关键部件的状态进行分析,以此确定目标对象将要损坏的部件,预测目标对象发生故障的可能性。
附图说明
[0029]
下面结合附图详述本发明的具体结构
[0030]
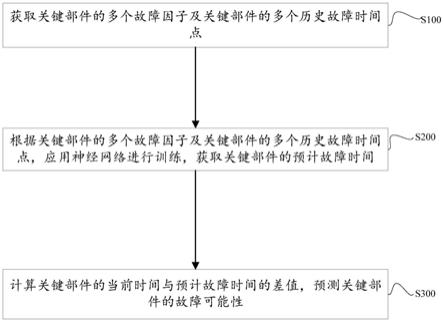
图1为本发明的一实施例中故障预测方法的流程图;
[0031]
图2为本发明的一实施例中的应用mlp进行神经网络训练的原理图;
[0032]
图3为本发明的一实施例中目标对象的故障预测装置的模块图。
具体实施方式
[0033]
为详细说明本发明的技术内容、构造特征、所实现目的及效果,以下结合实施方式并配合附图详予说明。
[0034]
请参阅图1,图1为本发明的第一实施例中故障预测方法的流程图。
[0035]
本发明提供了一种故障预测方法,包括如下步骤:
[0036]
步骤s100、获取关键部件的多个故障因子及关键部件的多个历史故障时间点;
[0037]
步骤s200、根据关键部件的多个故障因子及关键部件的多个历史故障时间点,应
用神经网络进行训练,获取关键部件的预计故障时间;
[0038]
步骤s300、计算关键部件的当前时间与预计故障时间的差值,预测关键部件的故障可能性;
[0039]
本发明的有益效果在于:应用神经网络进行训练,可以获取关键部件的预计故障时间,通过分析故障因子,确定关键部件的故障可能性。运用本方法之后,可以将关键部件的特征细化为容易把控的故障因子,对关键部件的状态进行分析,以此确定目标对象将要损坏的部件,预测目标对象发生故障的可能性。
[0040]
其中,步骤s100、获取关键部件的多个故障因子及多个历史故障时间点的步骤包括:
[0041]
步骤s110、在预设时间内,实时采集多台目标对象的运行数据、维护数据及故障记录;
[0042]
在本步骤中,可以使用目标对象设备全生命周期大数据监控平台来对多台目标对象的运行数据、维护数据及故障记录进行搜集。目标对象设备全生命周期大数据监控平台采用分布式集中采集方案,从而可以横向扩展或裁剪。在进一步地方案中,可以运用该平台,对每台设备进行台账管理,建立自动化的设备运维记录管理。由此可以避免信息孤岛的产生,实现数据的可完全共享,方便对目标对象进行深度挖掘。实现故障设备的追溯,客观评估产品质量,并应用这些数据辅助研发、生产完善产品设计及流程,以提高产品质量。
[0043]
步骤s120、按照目标对象的类型,对运行数据、维护数据及故障记录进行分类整理,生成目标对象的历史故障信息;
[0044]
步骤s130、从关键部件特征的历史故障信息,多个故障因子及关键部件的多个历史故障时间点。
[0045]
需要了解的是,目标对象的类型可以按照目标对象的型号进行分类,也可以按照目标对象的工况进行分类,还可以按照具有某一部件的目标对象进行分类。
[0046]
其中,按照目标对象的型号进行分类,是着重于对客户所售卖的目标对象进行维护,也着重于对用户所使用的目标对象提供维修意见。按照目标对象的使用环境进行分类,有助于研究哪种目标对象的工况所产生的问题;而按照具有某一部件的目标对象进行分类,则是着重对该部件进行研究,研究一个部件在不同环境下的不同状态。
[0047]
其中,目标对象的运行数据,包括,用户的使用习惯信息、运行模式信息、负载调节信息。应用目标对象的运行数据,可以了解目标对象运行的全过程,有助于从运行角度,分析目标对象故障的原因,预测关键部件可能产生的故障。
[0048]
其中,维护数据,包括,检查数据、保养数据及维修数据。运用维护数据,可以了解目标对象维护人员的行为,进而推导出目标对象维护人员的水平,有助于从维护者角度,分析目标对象故障的原因,预测关键部件可能产生的故障。
[0049]
其中,故障记录,包括,目标对象的故障信息,目标对象各部件的故障数据。运用故障记录,方便对目标对象的数据进行重组、分析及研究,从生产者的角度,更好地找出故障的原因。
[0050]
此外,目标对象的运行数据、维护数据与故障记录,具有一定冗余性,运用这些信息,有助于消除不确定性,从而更准确的获取故障信息。
[0051]
具体的,步骤s120、按照目标对象的类型,对运行数据、维护数据及故障记录进行
分类整理的步骤中,包括:
[0052]
步骤s121、按照目标对象的类型,对运行数据、维护数据及故障记录的格式进行统一。
[0053]
需要了解的是,目标对象的类型繁多,而按照不同分类的方式所获得的目标对象,可能属于不同的厂家,也可能是同一厂家的不同的系列,因此,在本实施例中,可以将这些数据进行格式统一,以方便不同种类数据之间的处理。
[0054]
步骤s122、剔除运行数据、维护数据及故障记录中的数据异常点。
[0055]
需要了解的是,由于数据可能存在不一致的问题,因此,运行数据、维护数据及故障记录之间可能存在某一些矛盾点,为了降低计算难度,可以直接剔除这些数据异常点。
[0056]
步骤s123、对运行数据、维护数据及故障记录分别进行平滑处理,获得目标对象的数据变化趋势。
[0057]
需要了解的是,对运行数据、维护数据及故障记录分别进行平滑处理,运用数学方法,补全被剔除的数据异常点,以及缺失的数据,才可以使用这些数据进行神经网络计算,从而获得目标对象的多个数据变化趋势,进而预测目标对象的关键部件产生故障的可能性。本实施例是基于数据驱动预测的方法,通过大量数据的分析,从而确定目标对象的数据变化趋势。
[0058]
进一步地实施例中,可以结合上述实施例中获取目标对象的历史故障信息的步骤,也可以采用其他的方式,获取目标对象的历史故障信息。
[0059]
在一具体的实施例,步骤s130、从关键部件特征的历史故障信息,多个故障因子及关键部件的多个历史故障时间点,包括:
[0060]
步骤s131、应用主成分分析法,对关键部件特征的历史故障信息进行降维处理,生成关键部件的多个故障因子。
[0061]
其中,主成分分析法是一种降维度分析方法。在保留原数据主要信息的前提下,将多维度变量处理成少数综合变量的问题,可以有效降低多个变量之间的信息重叠,提高分析结果的准确度。
[0062]
需要了解的是,本实施例中,对目标对象的历史故障信息进行降维,是从目标对象的全局考虑的。在本实施例中,目标对象的历史故障信息进行被降维,可以剔除一些低可能性事件,从而大幅度降低关键部件的状态评估模型所需要的输入要素,以此节约计算量,增强诊断效率,同时,评估的准确度仍然是较高的。
[0063]
请参阅图2,图2为本发明的一实施例中的应用mlp进行神经网络训练的原理图。
[0064]
具体地,步骤s200、根据关键部件的多个故障因子及关键部件的多个历史故障时间点,应用神经网络进行训练,获取关键部件的预计故障时间,包括
[0065]
步骤s210、根据目标对象的工况,确定神经网络的隐藏层的层数。
[0066]
本步骤中,针对目标对象的工况的复杂程度,设定神经网络的隐藏层的层数,第一个隐藏层就代表第一次提取特征,而第二个隐藏层,就表示对第一次提取的特征进行第二次特征提取,以此类推。
[0067]
步骤s220、应用mlp神经网络进行模型训练,建立并改良关键部件的状态评估模型;
[0068]
步骤s230、应用所述关键部件的状态评估模型,计算出关键部件的预计故障时间。
[0069]
由此,关键部件的状态评估模型,就可以更贴近目标对象,更准确地获得关键部件的状态。
[0070]
可选地,步骤s220中,包括:
[0071]
步骤s221、对故障因子的历史参数进行分割,生成训练集数据、验证集数据和测试集数据
[0072]
步骤s222、对训练集数据进行神经网络训练,建立关键部件的状态评估模型。
[0073]
步骤s223、应用验证集数据,调整关键部件的状态评估模型。
[0074]
由此,可以获得因子所具有的权重,可以较为便捷地建立关键部件的状态评估模型。
[0075]
此外,可以在调整故障训练参数的过程中,将一些非常规的参数加入到状态评估模型中,生成更贴合目标对象的故障验证参数,从而更准确地建议目标对象的状态。其中,非常规的参数可以包括目标对象的工况信息,用户的使用习惯信息、检查数据、保养数据及维修数据等只有该目标对象才具有的信息。
[0076]
通过本实施例中步骤s221~步骤s223的技术方案,可以挖掘出关键部件的故障因子与器件寿命的相关性,应用关键部件的状态评估模型,更准确地分析出关键部件的状态。
[0077]
上述中,步骤s300、计算关键部件的当前时间与预计故障时间的差值,预测关键部件的故障可能性。
[0078]
具体的,可以计算关键部件的当前时间与预计故障时间的差值,当这一差值越小时,该关键部件的故障可能性就越低;当这一差值越大时,该关键部件的故障可能性就越高。
[0079]
进一步地,上述方法是可以对目标对象进行故障预测,此时,上述目标对象安装有至少两个关键部件,方法还包括:
[0080]
步骤s400、获取并比较各个关键部件的当前时间与预计故障时间的差值,确定目标对象损坏的关键部件。
[0081]
可以理解的是,关键部件的当前时间与预计故障时间的差值越小,其故障的可能性越低。
[0082]
为了更好的说明上述的整流器故障预测,本发明运用一个实施例对其进行说明。为了精确到小时预测整流器的状态,可以采用如下方法:
[0083]
首先,整流器故障因子有:电压、温度、pfc硬件保护信号、整流igbt c 级保护信号、输入接触器触点异常信号、缓冲接触器触点异常信号,将它们标记为:x1,x2,x3,x4,x5,x6[0084]
其次,在预设时间中,整流器故障时间为2018-02-02 02:02:02、2018-08-08 08:08:08、2018-10-10 10:10:10、2019-01-01 01:01:01、2019-06-06 06:06:06、2019-09-09 09:09:09、2020-03-03 03:03:03:
[0085]
由此,在过去两年中,整流器5分钟间隔的运行数据,数据集表1所示:
[0086]
timex1x2x3x4x5x62018-01-01 00:002361100002018-01-01 00:052472700112018-01-01 00:10217300100
…………………
2020-02-28 23:502302910002020-02-28 23:55228180000
[0087]
表1
[0088]
应用上表建立预测模型:需要输入为x1,x2,x3,x4,x5,x6,输出为下次发生故障的时间y,建立模型:
[0089]
y=f(x1,x2,x3,x4,x5,x6)
[0090]
选择mlp神经网络进行模型训练,其如图2所示
[0091]
接下来,用一个更具体的实施例中,说明,如何基于历史数据计算下次发生故障的时间:
[0092]
在2018-01-01 00:00时刻,下次发生故障的时间点是2018-02-02 02:02:02;
[0093]
则在2018-01-01 00:00时刻,它下次发生故障的时间是793.034小时后。
[0094][0095]
由此计算,得到模型训练的数据集,如表2:
[0096][0097][0098]
表2
[0099]
将数据集输入到mlp神经网络模型中训练,得到了整流器故障预测模型。
[0100]
假如当前时间是2020-03-0510:10:10,当前x1,x2,x3,x4,x5,x6为225,22,0,0, 0,0,输入到预测模型中得到730.03,由于730.03>1,说明预测未来一个小时内整流器不会发生故障,如果输入到模型中得到0.88<1,说明预测未来一个小时内整流器会发生故障。
[0101]
如图3所示,图3为本发明的一实施例中目标对象的故障预测装置的模块图。本发明还提供了一种目标对象的故障预测装置,包括:
[0102]
提取模块100,用于获取关键部件的多个故障因子及故障因子的多个历史故障时间点;
[0103]
训练模块200,用于根据所述关键部件的多个故障因子及故障因子的多个历史故障时间点,应用神经网络进行训练,获取关键部件的预计故障时间;
[0104]
预测模块300,用于计算所述关键部件的当前时间与所述预计故障时间的差值,预测所述关键部件的故障可能性。
[0105]
需要了解的是,上述模块仅为粗略划分的模块,模块内部发各个功能,是可以依靠多种单元的组合所形成的。从本质上来看,上述装置是作为上述方法的虚拟执行主体,用于承载上述方法。
[0106]
本申请还提供了一种终端,其包括处理器、存储器和显示器,处理器耦接存储器与显示器,存储器上存储有可在处理器上执行的计算机程序;处理器执行计算机程序,
[0107]
本发明还提供了一种存储介质,包括计算机程序,计算机程序被处理器加载并执行时,实现上述的方法中的步骤。
[0108]
所述处理器可以是中央分析单元,还可以是其他通用处理器、数字信号处理器、专用集成电路、现场可编程门阵列或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。
[0109]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
[0110]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1