基于列车轴箱垂向加速度信号的车轮多边形波深估计方法与流程
[0001]
本发明属于车轮多边形波深检测技术领域,具体涉及一种基于列车轴箱垂向加速度信号的车轮多边形波深估计方法。
背景技术:
[0002]
随着科技的不断发展,轨道车辆的技术也是日新月异,从蒸汽机车、内燃机车、电力机车经历了多次变革,尤其是现代,高铁以其快速舒适正逐渐成为日常出行的首选。并且随着城市发展和进步,地铁也成为人们日常生活必不可少的出行方式,所以目前轨道车辆包含了多种形式:动车组、客货运列车、地铁以及有轨电车等,但是,这些轨道车辆的共同点是,轮轨间均有滚动接触摩擦,这直接影响车辆与轨道耦合动力学性能及安全。随着列车速度和载重量的不断提升,高速列车会在运行一段时间后车轮表现出不同的形式,其中车轮多边形是车轮不圆中的一种特殊形式。车轮多边形不圆顺会恶化轮轨间接触关系并加剧列车轨道系统的振动和噪声,对钢轨、车辆等部件造成损害,缩短部件服役寿命,甚至可能危机列车运巧安全。车轮多边形问题曾导致震惊世界的ice列车脱轨事故,事故造成大量的人员伤亡。
[0003]
车轮多边形是一个很复杂的过程,与轮轨系统的特殊性和列车运行环境密切相关。这些因素造成车轮圆周方向出现多边形特征,导致车轮周期性的非圆化或是非周期性的非圆化。针对国内高速列车出现的多边形问题,目前只有采取镟轮的办法来减缓。车轮多边形波深一般都在毫米量级,通过传统的人工识别方法效率低下且准确率低。目前的检测方法主要分为静态检测和动态检测两类,静态测量是在列车停运状态下利用车轮粗糙度测量仪等专业仪器检测,虽然检测精度较高,但影响列车运行,效率较低,检测成本高。而动态检测不影响列车正常运行,检测效率高,更具有实用性。
[0004]
发明人在实际使用过程中发现,这些现有技术至少存在以下技术问题:
[0005]
采用直接的测量车轮外形的方式即静态检测需要停车检测,耗费时间长,影响列车运行,而现有的动态检测的精度较低,无法为镟轮提供较为精确的数据支持。
技术实现要素:
[0006]
为克服上述存在之不足,本发明的发明人通过长期的探索尝试以及多次的实验和努力,不断改革与创新,提出了一种基于列车轴箱垂向加速度信号的车轮多边形波深估计方法,其可以通过提取轴箱垂向加速度信号特征估计车轮多边形的波深,具有精度高,可以减少受到环境的影响等优点,可为判断车轮是否需要镟修提供依据并提高检测效率。
[0007]
为实现上述目的本发明所采用的技术方案是:提供一种基于列车轴箱垂向加速度信号的车轮多边形波深估计方法。包括如下步骤:
[0008]
1)信号获取:采集列车在不同速度等级、不同阶次和不同波深条件下轴箱的垂向加速度响应信号;
[0009]
2)信号提取:将采集轴箱垂向加速度信号进行时域、频域和时频域特征提取,构建
训练集;
[0010]
3)数据预处理:对训练集进行归一化和主成分分析,得到归一化的训练集和降维后的训练集;
[0011]
5)建立极限学习机模型:将降维后的训练集作为极限学习机的输入,将归一化处理后的训练集中车轮多边形波深作为极限学习机的输出,建立极限学习机模型;
[0012]
6)建立粒子群优化的极限学习机模型:
[0013]
6.1)随机初始化由极限学习机的输入权值ω和隐含层偏差b组成的粒子种群;
[0014]
6.2)用极限学习机的车轮多边形波深估计值与其对应的实际值来获得粒子群算法的适应度值,基于粒子的适应度值计算粒子的个体最优和全局最优;
[0015]
6.3)基于粒子的个体最优和全局最优得到最优输入权值ω和最优隐含层偏差b,根据所得最优输入权值ω和最优隐含层偏差b计算输出权值矩阵,得到基于粒子群优化极限学习机的车轮多边形波深估计模型;
[0016]
7)预估计算:对车轮多边形波深进行估计,将测试集数据输入到上述粒子群优化的极限学习机模型中,得到车轮多边形波深的估计值。
[0017]
根据本发明所述的一种基于列车轴箱垂向加速度信号的车轮多边形波深估计方法,其进一步的优选技术方案是:步骤2)中时域特征包括:绝对值的平均值、有效值、峰值、峭度、偏度、均方根、方差、标准差、峰值因子、波形因子、脉冲因子、裕度因子;频域特征包括:重心频率、频率方差、均方频率;时频域特征包括:小波尺度熵(e1~e8)、小波能量熵、小波奇异谱熵。
[0018]
根据本发明所述的一种基于列车轴箱垂向加速度信号的车轮多边形波深估计方法,其进一步的优选技术方案是:步骤3)中归一化处理为:将不同速度、阶次、波深以及对应的加速度特征数据建立训练集数据样本库为x=[x1,x2,
…
x
n
]
t
,对x进行归一化处理,归一化方法采用线性函数归一化方法。
[0019]
根据本发明所述的一种基于列车轴箱垂向加速度信号的车轮多边形波深估计方法,其进一步的优选技术方案是:步骤3)中将训练集数据样本库中的速度、阶次和加速度特征数据进行主成分分析,得到降维后的主成分数据,步骤为
[0020]
1)计算样本x
i
经标准化处理后的协方差矩阵y;
[0021]
2)求出协方差矩阵y的各特征值λ和对应的特征向量μ;
[0022]
3)根据特征向量矩阵得到样本库数据的主成分z={z1,z2,
…
z
n
},根据从大到小排列的各主成分特征值按(1)式计算相应的方差贡献率g,将累计方差贡献率达到设定阈值条件的前k个主成分作为降维后的数据样本
[0023][0024]
根据本发明所述的一种基于列车轴箱垂向加速度信号的车轮多边形波深估计方法,其进一步的优选技术方案是:累计方差贡献率阈值设定为95%-97%。
[0025]
根据本发明所述的一种基于列车轴箱垂向加速度信号的车轮多边形波深估计方法,其进一步的优选技术方案是:所述训练集数据样本库为x=[x1,x2,
…
x
n
]
t
,其中每行表
示一个样本,每列表示一类特征。
[0026]
根据本发明所述的一种基于列车轴箱垂向加速度信号的车轮多边形波深估计方法,其进一步的优选技术方案是:所述数据样本库为在不同速度条件下,均匀设置车轮多边形阶次与波深条件下所采集的加速度响应特征数据。
[0027]
根据本发明所述的一种基于列车轴箱垂向加速度信号的车轮多边形波深估计方法,其进一步的优选技术方案是:所述粒子群优化的极限学习机模型建立方法为:
[0028]
1)首先确定网络神经元个数、激活函数类型、种群规模m,最大迭代次数t,惯性权重w和学习因子c1、c2;随机初始化由极限学习机的输入权值ω和隐含层偏差b组成的粒子种群,根据ω和b的范围确定粒子位置和速度的范围,分别为[-w
max
,w
max
]、[-v
max
,v
max
];
[0029]
2)计算粒子的适应度值,用极限学习机的车轮多边形波深估计值与其对应的实际值,如(2)式所示计算均方根误差值rmse作为粒子群算法适应度值
[0030][0031]
其中:b
i
为车轮多边形波深实际值,d
i
为车轮多边形波深估计值,n为波深数据个数;
[0032]
3)基于粒子的适应度值,计算粒子的个体最优和全局最优。更新下一时刻粒子i的第d维速度信息和位置信息的计算公式分别如(3)、(4)式所示:
[0033][0034][0035]
其中α为惯性权重,调节算法的全局与局部寻优能力;t为当前迭代次数;c1、c2为学习因子;随机数r1、r2的取值范围为[0,1];p
i
为粒子个体的最佳位置;p
g
为粒子种群的最佳位置
[0036]
4)判断是否达到迭代的最大次数,若满足条件,此时得到经过pso优化后最优输入权值ω和最优隐含层偏差b,若未达到,转到上一步(即粒子群优化的极限学习机模型的第3)步),继续迭代寻优。
[0037]
根据本发明所述的一种基于列车轴箱垂向加速度信号的车轮多边形波深估计方法,其进一步的优选技术方案是:所述测试集数据是采用与训练集不同速度、不同阶次及对应的轴箱垂向加速度振动特征作为测试样本,测试集经标准化、主成分分析后输入粒子群优化的极限学习机模型中,得到车轮多边形波深的估计值。
[0038]
相比现有技术,本发明的技术方案具有如下优点/有益效果:
[0039]
1、采用基于粒子群优化的极限学习机(pso-elm)神经网络模型,可以得到更高精度的波深预估数据,动态检测不需要停车用仪器去测量,可节省时间与成本。
[0040]
2、通过预处理后的列车轴箱垂向加速度信号作为预估的数据来源,数据受到干扰的程度降低,适应范围更广,数据精度更高,数据更加的可靠。
附图说明
[0041]
为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
[0042]
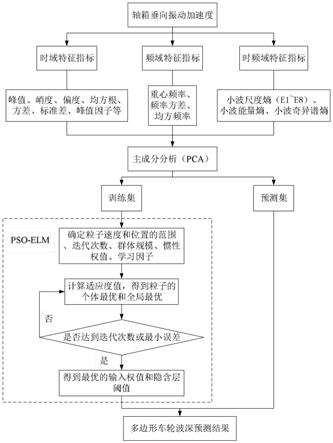
图1为本发明实施例的基于粒子群优化极限学习机模型车轮多边形波深估计方法流程图;
[0043]
图2为本发明实施例中数据样本的前五阶主成分累计方差贡献率;
[0044]
图3为本发明实施例中适应度值迭代进化曲线;
[0045]
图4为本发明实施例中对数据样本降维后利用粒子群优化的极限学习机的波深估计值与真实值对比图;
[0046]
图5为本发明实施例中使用极限学习机的波深估计值与真实值对比图。
具体实施方式
[0047]
为使本发明目的、技术方案和优点更加清楚,下面对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明的一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。
[0048]
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中可以不对其进行进一步定义和解释。
[0049]
实施例:
[0050]
一种基于pso-elm的车轮多边形波深估计方法详细流程如图1所示,包括以下步骤:
[0051]
1、采集列车在不同速度等级、不同阶次和不同波深条件下轴箱的垂向加速度响应信号;
[0052]
具体实施方式中,采集和谐2型电力机车在速度等级分别为70km/h、90km/h、120km/h,车轮多边形阶次分别为5阶、10阶、15阶、20阶,车轮多边形波深分别为0.002mm、0.004mm、0.006mm、0.008mm、0.01mm条件下的轴箱加速度信号;
[0053]
2、提取轴箱垂向加速度信号的时域、频域和时频域特征;
[0054]
具体实施方式中,时域特征包括:绝对值的平均值、有效值、峰值、峭度、偏度、均方根、方差、标准差、峰值因子、波形因子、脉冲因子、裕度因子;频域特征包括:重心频率、频率方差、均方频率;时频域特征包括:小波尺度熵(e1~e8)、小波能量熵、小波奇异谱熵;
[0055]
3、将不同速度、阶次、波深以及对应的加速度特征数据建立数据样本库为x=[x1,x2,
…
x
n
]
t
,待估计波深的数据样本为x'=[x1',x2',
…
x
n
']
t
,对x和x'同时进行归一化处理;
[0056]
具体实施方式中,所述数据样本库x=[x1,x2,
…
x
n
]
t
为60行28列的矩阵,其中每行表示一个样本,每列表示一类特征。待估计波深的数据样本为x'=[x1',x2',
…
x
n
']
t
为9行28列的矩阵。如(1)式所示对x和x'同时进行归一化处理;
[0057][0058]
其中x
norm
为归一化后数据,x为原始样本库数据,x
min
、x
max
分别为样本库数据的最小值与最大值;
[0059]
4、对上述标准化后的样本库数据中的速度、阶次和加速度特征数据进行主成分分析,得到降维后的主成分数据;
[0060]
4.1、将样本x
i
按(2)式得到标准化处理后的并计算x
i*
的协方差矩阵y;
[0061][0062]
4.2、求出协方差矩阵y的各特征值λ和对应的特征向量μ;
[0063]
4.3、根据特征向量矩阵得到样本库数据的主成分z={z1,z2,
…
z
n
},根据从大到小排列的各主成分特征值按(3)式计算相应的方差贡献率,将累计方差贡献率g达到设定阈值条件的前k个主成分作为降维后的数据样本;
[0064][0065]
具体实施方式中,累计方差贡献率阈值设定为95%-97%。经过主成分分析后,如图2所示,前5个主成分的方差贡献率分别为0.53446、0.25363、0.097608、0.039514、0.034668,累计方差贡献率达到96.008%,满足累计方差贡献率阈值设定条件,则k值为5;
[0066]
5、划分训练集与测试集以及对应的输入输出数据集,将训练集中降维后的数据样本作为极限学习机的输入,将训练集中归一化处理后的车轮多边形波深作为极限学习机的输出,建立极限学习机模型;
[0067]
具体实施方式中,极限学习机的输入为训练集中降维后的数据样本,为60行5列的矩阵,输出为训练集中归一化处理后的车轮多边形波深,为60行1列的矩阵;
[0068]
6、建立粒子群优化的极限学习机模型。计算粒子的适应度值,用极限学习机的车轮多边形波深估计值与其对应的实际值,如(4)式所示计算均方根误差值rmse作为粒子群算法适应度值。采用粒子群算法优化极限学习机的输入权值ω和隐含层偏差b;
[0069][0070]
其中:b
i
为车轮多边形波深实际值,d
i
为车轮多边形波深估计值,n为波深数据个数;
[0071]
6.1、首先确定网络神经元个数、激活函数类型、种群规模m,最大迭代次数t,惯性权重w和学习因子c1、c2;
[0072]
6.2、随机初始化由极限学习机的输入权值ω和隐含层偏差b组成的粒子种群,根据ω和b的范围确定粒子位置和速度的范围,分别为[-w
max
,w
max
]、[-v
max
,v
max
];
[0073]
6.3、基于粒子的适应度值,计算粒子的个体最优和全局最优。更新下一时刻粒子i
的第d维速度信息和位置信息的计算公式分别如(5)、(6)式所示:
[0074][0075][0076]
其中α为惯性权重,调节算法的全局与局部寻优能力;t为当前迭代次数;c1、c2为学习因子;随机数r1、r2的取值范围为[0,1];p
i
为粒子个体的最佳位置;p
g
为粒子种群的最佳位置;
[0077]
6.4、判断是否达到迭代的最大次数,若满足条件,此时得到经过pso优化后最优的输入权值ω和最优隐含层偏差b,若未达到,转到步骤6.3,继续迭代寻优;
[0078]
具体实施方式中,粒子群优化的极限学习机模型参数选取如下:elm隐含层神经元个数设定为10,激活函数类型选择
‘
sigmoid’,如(7)式所示;粒子的位置和速度范围均设定在[-2,2],m=20,t=500,w=0.9,c1=c2=2;
[0079][0080]
其中a控制激活函数曲线的陡峭程度,b控制激活函数曲线的平移特性;
[0081]
按以上参数设置进行迭代寻优500次,得到最优均方根误差为0.0018599,适应度值迭代曲线如图3所示;
[0082]
7、将所得最优输入权值ω和最优隐含层偏差b代入极限学习机,得到基于粒子群优化极限学习机的车轮多边形波深估计模型;
[0083]
8、对车轮多边形波深进行估计,将测试集数据输入到上述粒子群优化的极限学习机模型中,得到车轮多边形波深的估计值;
[0084]
如图4图5所示,具体实施方式中,随机选取7组不同速度、不同阶次以及对应的轴箱垂向加速度振动特征作为测试样本,经标准化、主成分分析后的数据如表1所示,估计多边形车轮波深,同时,采用未作降维处理的数据样本且未作优化处理的极限学习机模型对比估计结果,估计结果如表1所示;
[0085]
表1车轮多边形波深估计结果
[0086]
[0087][0088]
由表1计算得出,本发明方法估计值的平均相对误差为0.0876,均方根误差为0.000695,极限学习机直接估计的平均相对误差为0.3064,均方根误差为0.0019。结果表明本发明估计精度更高;同时从图4与图5的对比也可看出,采用经过降维处理的数据样本且优化处理的极限学习机模型(即基于粒子群优化极限学习机的车轮多边形波深估计模型)可以得到更高的车轮多边形波深预估结果,通过动态过程获取车轮多边形波深,减小了车轮多边形波深检测难度,过程简便,精度高于现有的静态直接测量或其他动态测量过程,给列车车轮是否需要镟轮以及镟轮过程提供更加确切的数据支持。
[0089]
涉及术语解释:
[0090]
1.数据归一化和主成分分析是常用的数据预处理方法,数据归一化能够将不同量纲和数量级的数据转化为可互相进行数学运算,主成分分析可实现数据降维,简化分析。以数据驱动为基础的数学处理方法广泛应用于数据特征提取、监测数据潜在信息的挖掘等。采用粒子群算法优化极限学习机输入层与隐含层间的连接权值及隐含层神经元隐含层偏差b,将该优化模型应用于车轮多边形波深估计,通过获取的轴箱垂向加速度响应信号监测大数据,挖掘出振动数据与波深之间的关系,可实现多边形车轮的波深估计。
[0091]
2.极限学习机(extreme learning machine),缩写为elm,是一种简单易用、有效的单隐层前馈神经网络slfns学习算法。
[0092]
3.粒子群优化(particle swarm optimization),缩写为pso,又称微粒群算法,是由j.kennedy和r.c.eberhart等人于1995年开发的一种演化计算技术,来源于对一个简化社会模型的模拟。其中"群(swarm)"来源于微粒群符合m.m.millonas在开发应用于人工生命(artificial life)的模型时所提出的群体智能的5个基本原则。"粒子(particle)"是一个折衷的选择,因为既需要将群体中的成员描述为没有质量、没有体积的,同时也需要描述它的速度和加速状态。
[0093]
pso算法最初是为了图形化的模拟鸟群优美而不可预测的运动。而通过对动物社会行为的观察,发现在群体中对信息的社会共享提供一个演化的优势,并以此作为开发算法的基础。通过加入近邻的速度匹配、并考虑了多维搜索和根据距离的加速,形成了pso的
最初版本。之后引入了惯性权重ω来更好的控制开发(exploitation)和探索(exploration),形成了标准版本。
[0094]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0095]
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0096]
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度低于第二特征。
[0097]
以上仅是本发明的优选实施方式,应当指出的是,上述优选实施方式不应视为对本发明的限制,本发明的保护范围应当以权利要求所限定的范围为准。对于本技术领域的普通技术人员来说,在不脱离本发明的精神和范围内,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1