车辆的追踪方法、系统及计算机可读存储介质与流程
[0001]
本申请涉及数据处理和轨迹追踪技术领域,尤其涉及一种车辆的追踪方法、系统及计算机可读存储介质。
背景技术:
[0002]
随着信息化和城镇化进程的加速,城市人口迅速增长,并随着居民生活水平的不断提高,车辆拥有量迅速增长,交通需求极大增加,原有的交通需求平衡被打破,而相反城市的基础建设,交通管理设施和管理能力的提高跟不上交通需求发展速度,原有基础设施的缺陷和弊端不断暴露,通过智能安防技术手段实现了监控及预警,然而这只是一个事中控制的能力,对于事后追溯的能力却未及时完善。
[0003]
目前的监控网络系统只能对特定情况的轨迹行为进行预警行为,常见的方式为前端通过微卡口拍摄车辆行驶画面,获取设备串号,并形成车辆识别特征和记录时间、位置包含在内的记录表。后台通过获取前端的记录表,进行数据分析,形成一个车辆的动态轨迹数据,对于特定情况的轨迹行为发出预警行为。然而,当需要对待追踪车辆进行锁定及追踪时,不能预测车辆下一次的位置,使得车辆追踪的效率低。
技术实现要素:
[0004]
本申请的主要目的在于提供一种车辆的追踪方法、系统及计算机可读存储介质,旨在提升车辆追踪的效率。
[0005]
为实现上述目的,本申请实施例提供一种车辆的追踪方法,所述车辆的追踪方法包括:
[0006]
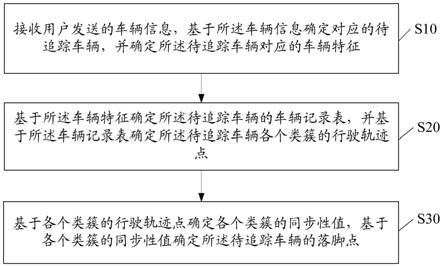
接收用户发送的车辆信息,基于所述车辆信息确定对应的待追踪车辆,并确定所述待追踪车辆对应的车辆特征;
[0007]
基于所述车辆特征确定所述待追踪车辆的车辆记录表,并基于所述车辆记录表确定所述待追踪车辆各个类簇的行驶轨迹点;
[0008]
基于各个类簇的行驶轨迹点确定各个类簇的同步性值,基于各个类簇的同步性值确定所述待追踪车辆的落脚点。
[0009]
可选地,所述基于各个类簇的同步性值确定所述待追踪车辆的落脚点的步骤包括:
[0010]
将各个类簇的同步性值与预设落脚次数阈值进行对比,确定同步性值大于或者等于所述预设落脚次数阈值对应的目标类簇;
[0011]
基于所述目标类簇确定所述待追踪车辆对应的落脚点。
[0012]
可选地,所述基于所述目标类簇确定所述待追踪车辆对应的落脚点的步骤包括:
[0013]
确定各个所述目标类簇对应的同步性值,基于各个所述目标类簇的同步性值确定各个所述目标类簇对应的车辆落脚率;
[0014]
基于各个所述目标类簇对应的车辆落脚率确定所述待追踪车辆对应的落脚点。
[0015]
可选地,所述车辆特征包括车牌号码、车牌颜色和车身颜色,基于所述车辆特征确定所述待追踪车辆的车辆记录表的步骤包括:
[0016]
将所述待追踪车辆的车牌号码、车牌颜色和车身颜色与监控网络记录中的历史车辆数据进行匹配,得到包含所述待追踪车辆的记录时间和记录位置的车辆记录表。
[0017]
可选地,所述基于各个类簇的行驶轨迹点确定各个类簇的同步性值的步骤包括:
[0018]
确定各个类簇中各个行驶轨迹点的记录时间,将各个类簇中各个行驶轨迹点的记录时间进行同一类簇时间对比,得到各个类簇中的各个时间差值;
[0019]
基于各个类簇中的各个时间差值确定各个类簇的同步性值。
[0020]
可选地,所述基于各个类簇中的各个时间差值确定各个类簇的同步性值的步骤包括:
[0021]
将各个类簇中的各个时间差值与预设时间阈值进行对比,确定在各个类簇的各个时间差值中是否存在大于所述预设时间阈值的目标时间差值;
[0022]
若确定在各个类簇中存在目标时间差值,则确定各个类簇中目标时间差值的个数,基于所述个数确定各个类簇的同步性值。
[0023]
可选地,所述基于所述车辆记录表确定所述待追踪车辆各个类簇的行驶轨迹点的步骤包括:
[0024]
基于所述车辆记录表中的各个记录时间和各个记录位置确定所述待追踪车辆的各个行驶轨迹点;
[0025]
基于各个记录时间和各个记录位置将所述待追踪车辆的各个行驶轨迹点进行分类,得到所述待追踪车辆各个类簇的行驶轨迹点。
[0026]
可选地,所述车辆信息包括车牌号码和车辆图片,所述基于所述车辆信息确定对应的待追踪车辆的步骤包括:
[0027]
若所述车辆信息为车牌号码,则基于大数据对所述车牌号码进行分析,得到所述待追踪车辆;或者,
[0028]
若所述车辆信息为车辆图片,则基于深度学习的识别模型对所述车辆图片进行识别,得到所述待追踪车辆。
[0029]
本申请实施例还提供一种系统,所述系统包括存储器、处理器和存储在所述存储器上并在所述处理器上运行的车辆的追踪程序,所述车辆的追踪程序被所述处理器执行时实现如上所述的车辆的追踪方法的步骤。
[0030]
本申请实施例还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有车辆的追踪程序,所述车辆的追踪程序被处理器执行时实现如上所述的车辆的追踪方法的步骤。
[0031]
本申请实施例提供的车辆的追踪方法、系统及计算机可读存储介质,通过接收用户发送的车辆信息,基于车辆信息确定对应的待追踪车辆,并确定待追踪车辆对应的车辆特征;基于车辆特征确定待追踪车辆的车辆记录表,并基于车辆记录表确定待追踪车辆各个类簇的行驶轨迹点;基于各个类簇的行驶轨迹点确定各个类簇的同步性值,基于各个类簇的同步性值确定待追踪车辆的落脚点。由此可知,本申请在对待追踪车辆进行追踪的过程中,通过分析待追踪车辆的行驶轨迹点,再根据行驶轨迹点的同步性值预测待追踪车辆的落脚点,从而使得根据落脚点有针对性的对待追踪车辆进行追踪,提高车辆的追踪效率。
附图说明
[0032]
图1是本申请实施例方案涉及的硬件运行环境的系统结构示意图;
[0033]
图2是本申请车辆的追踪方法第一实施例的流程示意图;
[0034]
图3是本申请车辆的追踪方法第一实施例步骤s30细化流程示意图;
[0035]
图4是本申请车辆的追踪装置的功能模块示意图。
[0036]
本申请目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0037]
应当理解,此处所描述的具体实施例仅用以解释本申请,并不用于限定本申请。
[0038]
本申请实施例的主要解决方案是:接收用户发送的车辆信息,基于车辆信息确定对应的待追踪车辆,并确定待追踪车辆对应的车辆特征;基于车辆特征确定待追踪车辆的车辆记录表,并基于车辆记录表确定待追踪车辆各个类簇的行驶轨迹点;基于各个类簇的行驶轨迹点确定各个类簇的同步性值,基于各个类簇的同步性值确定待追踪车辆的落脚点。由此可知,本申请在对待追踪车辆进行追踪的过程中,通过分析待追踪车辆的行驶轨迹点,根据行驶轨迹点的同步性值预测待追踪车辆的落脚点,从而使得根据落脚点有针对性的对待追踪车辆进行追踪,提高车辆的追踪效率。
[0039]
具体地,参照图1,图1为本申请实施例方案涉及的硬件运行环境的系统结构示意图。
[0040]
本申请实施例的系统可以具有数据处理功能的固定系统和车辆追踪系统。
[0041]
如图1所示,该系统可以包括:处理器1001,例如cpu(central processing unit,中央处理器),存储器1005,用户接口1003,网络接口1004,通信总线1002。通信总线1002用于实现这些组件之间的连接通信。用户接口1003可以包括显示屏(display)、输入单元比如键盘(board),用户接口1003可选的还可以包括标准的有线接口(如usb(universal serial bus,通用串行总线)接口)、无线接口(如蓝牙接口)。网络接口1004可以包括标准的有线接口、无线接口(如wi-fi((wireless-fidelity))接口)。存储器1005可以是高速ram存储器,也可以是稳定的存储器(non-volatile memory),例如磁盘存储器。存储器1005可选的还可以是独立于前述处理器1001的存储装置。
[0042]
本领域技术人员可以理解,图1中示出的系统结构并不构成对系统的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件布置。
[0043]
如图1所示,作为一种计算机可读存储介质的存储器1005中可以包括操作设备、网络通信模块、用户接口模块以及车辆的追踪程序。其中,操作设备是管理和控制系统硬件和软件资源的程序,支持车辆的追踪程序以及其它软件或程序的运行。
[0044]
在图1所示的系统中,网络接口1004主要用于连接后台服务器,与后台服务器进行数据通信;用户接口1003主要用于连接用户终端,与用户终端进行数据通信。
[0045]
其中,处理器1001可以用于调用存储器1005中存储的车辆的追踪程序,并执行如下操作:
[0046]
接收用户发送的车辆信息,基于所述车辆信息确定对应的待追踪车辆,并确定所述待追踪车辆对应的车辆特征;
[0047]
基于所述车辆特征确定所述待追踪车辆的车辆记录表,并基于所述车辆记录表确
定所述待追踪车辆各个类簇的行驶轨迹点;
[0048]
基于各个类簇的行驶轨迹点确定各个类簇的同步性值,基于各个类簇的同步性值确定所述待追踪车辆的落脚点。
[0049]
进一步地,处理器1001可以调用存储器1005中存储的车辆的追踪程序,还执行以下操作:
[0050]
将各个类簇的同步性值与预设落脚次数阈值进行对比,确定同步性值大于或者等于所述预设落脚次数阈值对应的目标类簇;
[0051]
基于所述目标类簇确定所述待追踪车辆对应的落脚点。
[0052]
进一步地,处理器1001可以调用存储器1005中存储的车辆的追踪程序,还执行以下操作:
[0053]
确定各个所述目标类簇对应的同步性值,基于各个所述目标类簇的同步性值确定各个所述目标类簇对应的车辆落脚率;
[0054]
基于各个所述目标类簇对应的车辆落脚率确定所述待追踪车辆对应的落脚点。
[0055]
进一步地,处理器1001可以调用存储器1005中存储的车辆的追踪程序,还执行以下操作:
[0056]
将所述待追踪车辆的车牌号码、车牌颜色和车身颜色与监控网络记录中的历史车辆数据进行匹配,得到包含所述待追踪车辆的记录时间和记录位置的车辆记录表。
[0057]
进一步地,处理器1001可以调用存储器1005中存储的车辆的追踪程序,还执行以下操作:
[0058]
确定各个类簇中各个行驶轨迹点的记录时间,将各个类簇中各个行驶轨迹点的记录时间进行同一类簇时间对比,得到各个类簇中的各个时间差值;
[0059]
基于各个类簇中的各个时间差值确定各个类簇的同步性值。
[0060]
进一步地,处理器1001可以调用存储器1005中存储的车辆的追踪程序,还执行以下操作:
[0061]
将各个类簇中的各个时间差值与预设时间阈值进行对比,确定在各个类簇的各个时间差值中是否存在大于所述预设时间阈值的目标时间差值;
[0062]
若确定在各个类簇中存在目标时间差值,则确定各个类簇中目标时间差值的个数,基于所述个数确定各个类簇的同步性值。
[0063]
进一步地,处理器1001可以调用存储器1005中存储的车辆的追踪程序,还执行以下操作:
[0064]
基于所述车辆记录表中的各个记录时间和各个记录位置确定所述待追踪车辆的各个行驶轨迹点;
[0065]
基于各个记录时间和各个记录位置将所述待追踪车辆的各个行驶轨迹点进行分类,得到所述待追踪车辆各个类簇的行驶轨迹点。
[0066]
进一步地,处理器1001可以调用存储器1005中存储的车辆的追踪程序,还执行以下操作:
[0067]
若所述车辆信息为车牌号码,则基于大数据对所述车牌号码进行分析,得到所述待追踪车辆;或者,
[0068]
若所述车辆信息为车辆图片,则基于深度学习的识别模型对所述车辆图片进行识
别,得到所述待追踪车辆。
[0069]
本申请实施例通过接收用户发送的车辆信息,基于车辆信息确定对应的待追踪车辆,并确定待追踪车辆对应的车辆特征;基于车辆特征确定待追踪车辆的车辆记录表,并基于车辆记录表确定待追踪车辆各个类簇的行驶轨迹点;基于各个类簇的行驶轨迹点确定各个类簇的同步性值,基于各个类簇的同步性值确定待追踪车辆的落脚点。由此可知,本申请在对待追踪车辆进行追踪的过程中,通过分析待追踪车辆的行驶轨迹点,根据行驶轨迹点的同步性值预测待追踪车辆的落脚点,从而使得根据落脚点有针对性的对待追踪车辆进行追踪,提高车辆的追踪效率。
[0070]
基于上述的系统架构但不限于上述架构,本申请实施例提供了车辆的追踪方法的实施例,需要说明的是,虽然在流程图中示出了逻辑顺序,但是在某些数据下,可以以不同于此处的顺序完成所示出或描述的步骤。
[0071]
本申请本实施例方法的执行主体可以是一种车辆追踪装置,也可以是一种车辆追踪系统,本申请实施例以车辆追踪系统作为执行主体进行举例。
[0072]
参照图2,图2为本申请车辆的追踪方法第一实施例的流程示意图。所述车辆的追踪方法包括:
[0073]
步骤s10,接收用户发送的车辆信息,基于所述车辆信息确定对应的待追踪车辆,并确定所述待追踪车辆对应的车辆特征。
[0074]
需要说明的是,用户需要通过车辆追踪系统追踪车辆时,要在车辆追踪系统的输入界面输入所要追踪车辆的车牌号码,或者通过用户终端通过网络将所要追踪车辆的车辆照片上传至车辆追踪系统。
[0075]
车辆追踪系统接收到用户在输入界面或者通过用户终端上传的车辆信息(车牌号码或者车辆图片)后,通过识别模型或者大数据对车辆信息进行识别或者分析,得到车辆信息对应的待追踪车辆。车辆追踪系统确定待追踪车辆后,对待追踪车辆的特征进行提取,得到待追踪车辆的车辆特征。
[0076]
在本实施例中,比如,用户输入所要追踪车辆的车牌号码为“粤b123456”,车辆追踪系统对“粤b123456”车牌号码进行分析,提取到“粤b123456”车辆对应的车辆特征为“车牌绿色、车身黑色和车标为比亚迪”。
[0077]
进一步地,所述步骤s10包括:
[0078]
步骤s101,若所述车辆信息为车牌号码,则基于大数据对所述车牌号码进行分析,得到所述待追踪车辆;
[0079]
步骤s102,若所述车辆信息为车辆图片,则基于深度学习的识别模型对所述车辆图片进行识别,得到所述待追踪车辆。
[0080]
具体地,车辆追踪系统若确定用户输入的车辆信息为车牌号码,则通过大数据对车牌号码进行分析,在服务器的车辆数据库中查询与该车牌号码匹配的车辆,确定用户所需要追踪的待追踪车辆。车辆追踪系统若确定用户上传的车辆信息为车辆图片,则通过基于yolov4算法的深度学习的识别模型对车辆图片进行识别,识别数据包括车型、车身颜色、车标或者车牌号码等,确定用户所需要追踪的待追踪车辆。
[0081]
需要说明的是,本实例中深度学习采用的算法为yolov4算法,yolov4算法是对yolov3算法的改进,yolov4算法比yolov3算法的识别精度和识别速度都快。
[0082]
步骤s20,基于所述车辆特征确定所述待追踪车辆的车辆记录表,并基于所述车辆记录表确定所述待追踪车辆各个类簇的行驶轨迹点。
[0083]
车辆追踪系统得到待追踪车辆的车辆特征后,获取监控网络记录中的历史数据信息,其中,监控网络记录中的历史数据信息包括微卡口拍摄的车辆行驶画面,并从车辆行驶画面提取到的车牌号码、车牌颜色和车身颜色等,也可以为车辆的轨迹数据,轨迹数据包括车辆身份特征、设备串号、记录时间和记录位置。然后,车辆追踪系统将车辆特征与监控网络记录中的历史数据信息进行匹配,得到包含待追踪车辆的身份特征、待追踪车辆的设备串号、待追踪车辆的记录时间和待追踪车辆的记录位置的车辆记录表。
[0084]
车辆追踪系统根据车辆记录表中待追踪车辆的记录时间和待追踪车辆的记录位置确定待追踪车辆的所有行驶轨迹点,其中,一个记录时间和一个记录位置构成一个行驶轨迹点。然后,车辆追踪系统将处于同一预设时间区段内,经过同一位置的行驶轨迹点确定为一个类簇,得到待追踪车辆各个类簇的行驶轨迹点,其中,预设时间段根据用户需求设定,本实施例不作限制。
[0085]
进一步地,所述步骤s20包括:
[0086]
步骤s201,将所述待追踪车辆的车牌号码、车牌颜色和车身颜色与监控网络记录中的历史车辆数据进行匹配,得到包含所述待追踪车辆的记录时间和记录位置的车辆记录表;
[0087]
步骤s202,基于所述车辆记录表中的各个记录时间和各个记录位置确定所述待追踪车辆的各个行驶轨迹点;
[0088]
步骤s203,基于各个记录时间和各个记录位置将所述待追踪车辆的各个行驶轨迹点进行分类,得到所述待追踪车辆各个类簇的行驶轨迹点。
[0089]
具体地,车辆追踪系统将待追踪车辆的车牌号码、车牌颜色和车身颜色与监控网络记录中的历史数据信息进行匹配,得到包含待追踪车辆的记录时间和待追踪车辆的记录位置的车辆记录表,需要说明的是,车辆记录表还可以包含待追踪车辆的身份特征和待追踪车辆的设备串号。
[0090]
车辆追踪系统根据车辆记录表中待追踪车辆的所有记录时间和待追踪车辆的所有记录位置确定待追踪车辆的所有行驶轨迹点,并将处于同一预设时间区段内,经过同一位置的行驶轨迹点确定为一个类簇,得到待追踪车辆各个类簇的行驶轨迹点。
[0091]
在本实施例中,比如,预设时间段为8:00至18:00,待追踪车辆“粤b123456”的行驶轨迹点分别为,行驶轨迹点1“9:00胜太路”、行驶轨迹点2“14:00天元西路”、行驶轨迹点3“15:00胜太路”和行驶轨迹点4“17:00天元西路”,车辆追踪系统则将行驶轨迹点分为两个类簇,类簇1为“位置:胜太路,时间:9:00和15:00”,类簇2为“位置:天元西路,时间:14:00和17:00”。
[0092]
步骤s30,基于各个类簇的行驶轨迹点确定各个类簇的同步性值,基于各个类簇的同步性值确定所述待追踪车辆的落脚点。
[0093]
车辆追踪系统确定各个类簇的行驶轨迹点后,确定每一个类簇中所有行驶轨迹点的记录时间,然后,车辆追踪系统将同一类簇中的所有记录时间两两进行时间数值大小比较,得到每一个类簇中的各个时间差值。接着,车辆追踪系统将每一个类簇中的各个时间差值与预设时间阈值进行数值大小比较,确定大于预设时间阈值的时间差值的个数,根据大
于预设时间阈值的时间差值的个数确定每一个类簇的同步性值,其中,预设时间阈值时根据用户需求设定的,本实施例不作限制。
[0094]
车辆追踪系统确定各个类簇的同步性值后,将每一个类簇的同步性值与预设落脚次数阈值进行数值大小比较,将同步性值大于或者等于预设落脚次数阈值的类簇确定为目标类簇,根据目标类簇的同步性值和预设时间段确定各个目标类簇的落脚率,其中,落脚率即为待追踪车辆下一次行驶轨迹点位置的概率,单位为落脚次数/时间(h小时)。最后,车辆追踪系统根据各个目标类簇的落脚率确定待追踪车辆的落脚点。
[0095]
本实施例通过接收用户发送的车辆信息,基于车辆信息确定对应的待追踪车辆,并确定待追踪车辆对应的车辆特征;基于车辆特征确定待追踪车辆的车辆记录表,并基于车辆记录表确定待追踪车辆各个类簇的行驶轨迹点;基于各个类簇的行驶轨迹点确定各个类簇的同步性值,基于各个类簇的同步性值确定待追踪车辆的落脚点。由此可知,本实施例在对待追踪车辆进行追踪的过程中,通过分析待追踪车辆的行驶轨迹点,根据行驶轨迹点的同步性值计算待追踪车辆可能出现位置的概率,根据待追踪车辆可能出现位置的概率预测待追踪车辆的落脚点,从而使得根据落脚点有针对性的对待追踪车辆进行追踪,提高车辆的追踪效率。
[0096]
参照图3,图3为本申请车辆的追踪方法另一实施例的流程示意图。所述另一实施例是步骤s30的细化,所述步骤s30包括:
[0097]
步骤s301,确定各个类簇中各个行驶轨迹点的记录时间,将各个类簇中各个行驶轨迹点的记录时间进行同一类簇时间对比,得到各个类簇中的各个时间差值。
[0098]
车辆追踪系统确定每一个类簇中所有行驶轨迹点的记录时间,并将同一类簇中所有行驶轨迹点的记录时间两两进行时间数值大小比较并作差计算,得到每一个类簇中的各个时间差值。
[0099]
在本实施例中,比如,待追踪车辆“粤b123456”的两个类簇分别为,类簇1为“位置:胜太路,时间:9:00和15:00”,类簇2为“位置:天元西路,时间:14:00和17:00”,车辆追踪系统得到,类簇1的时间差值为6小时,即360分钟,类簇2的时间差值为3小时,即180分钟。
[0100]
步骤s302,基于各个类簇中的各个时间差值确定各个类簇的同步性值。
[0101]
车辆追踪系统将每一个类簇中的各个时间差值与预设时间阈值进行数值大小比较,确定每一个类簇中大于预设时间阈值的时间差值的个数,将大于预设时间阈值的时间差值的个数转化为每一个类簇的应得同步性值,比如,大于预设时间阈值的时间差值的个数为10个,应得同步性值为10。然后,车辆追踪系统确定每一个类簇的初始同步性值,并将每一个类簇的初始同步性值和每一个类簇的应得同步性值进行相加求和,得到每一个类簇的同步性值。
[0102]
在本实施例中,比如,类簇1的初始同步性值为0,类簇2的初始同步性值为0,类簇1中大于预设时间阈值的时间差值的个数为10个,类簇2中大于预设时间阈值的时间差值的个数为15个,车辆追踪系统计算得到类簇1的同步性值为10,类簇2的同步性值为15。
[0103]
步骤s303,将各个类簇的同步性值与预设落脚次数阈值进行对比,确定同步性值大于或者等于所述预设落脚次数阈值对应的目标类簇。
[0104]
车辆追踪系统确定各个类簇的同步性值后,将每一个类簇的同步性值与预设落脚次数阈值进行数值大小比较,将同步性值大于或者等于预设落脚次数阈值的类簇确定为目
标类簇。
[0105]
在本实施例中,比如,预设落脚次数阈值为5,类簇1“胜太路”的同步性值为3小于5,类簇2为“天元西路”的同步性值为20大于5,车辆追踪系统则将类簇2“天元西路”确定为目标类簇。
[0106]
步骤s304,基于所述目标类簇确定所述待追踪车辆对应的落脚点。
[0107]
车辆追踪系统确定目标类簇后,根据目标类簇的同步性值和预设时间段计算各个目标类簇的落脚率,根据各个目标类簇的落脚率确定待追踪车辆下一次各个行驶轨迹点位置的出现概率,根据各个行驶轨迹点位置的出现概率确定待追踪车辆的落脚点。
[0108]
在本实施例中,比如,类簇1“胜太路”的落脚率为60%,类簇2“天元西路”的落脚率为15%,类簇3“金陵路”的落脚率为28%,根据落脚率类簇1大于类簇3大于类簇2,车辆追踪系统则确定待追踪车辆的下一次行驶轨迹点可能为胜太路。
[0109]
进一步地,所述步骤s302包括:
[0110]
步骤s3021,将各个类簇中的各个时间差值与预设时间阈值进行对比,确定在各个类簇的各个时间差值中是否存在大于所述预设时间阈值的目标时间差值;
[0111]
步骤s3022,若确定在各个类簇中存在目标时间差值,则确定各个类簇中目标时间差值的个数,基于所述个数确定各个类簇的同步性值。
[0112]
具体地,车辆追踪系统将同一类簇中所有行驶轨迹点的记录时间两两进行时间数值大小比较,确定在每一个类簇的各个时间差值中是否存在大于预设时间阈值的目标时间差值,若车辆追踪系统确定存在目标时间差值,车辆追踪系统则确定每一个类簇中大于预设时间阈值的时间差值的个数,将大于预设时间阈值的时间差值的个数转化为每一个类簇的应得同步性值,并与每一个类簇的初始同步性值进行相加求和,得到每一个类簇的同步性值。
[0113]
在本实施例中,比如,获取到4000个待追踪车辆“粤b123456”的行驶轨迹点,分别为09:00、10:00胜太路,14:30天元西路,17:00胜太西路等等。预设时间阈值设置为5分钟,初始同步性值为0,待追踪车辆“粤b123456”出现在胜太路的2个时间差为60分钟大于预设时间阈值5分钟,车辆追踪系统则将类簇“胜太路”的同步性值+1,以此类推,可以得到待追踪车辆“粤b123456”所有类簇的同步性值。
[0114]
进一步地,所述步骤s304包括:
[0115]
步骤s3041,确定各个所述目标类簇对应的同步性值,基于各个所述目标类簇的同步性值确定各个所述目标类簇对应的车辆落脚率;
[0116]
步骤s3042,基于各个所述目标类簇对应的车辆落脚率确定所述待追踪车辆对应的落脚点。
[0117]
具体地,车辆追踪系统确定目标类簇的同步性值后,将各个目标类簇的同步性值与预设时间段进行求商,得到的商值即为各个目标类簇的落脚率。车辆追踪系统根据各个目标类簇的落脚率的数值大小确定待追踪车辆下一次行驶轨迹点位置的出现概率,根据各个位置的出现概率确定待追踪车辆的落脚点。
[0118]
需要说明的是,落脚率越高待追踪车辆出现在该位置的可能性也越高,因此,可以将落脚率最高的位置作为待追踪车辆的预测位置。
[0119]
在本实施例中,比如,预设时间段为48小时,待追踪车辆“粤b123456”的目标类簇1
“
胜太路”的同步性值为28,目标类簇2“天元西路”的同步性值为“14”和目标类簇3“金陵路”的同步性值为7,车辆追踪系统计算得到目标类簇1的落脚率为28/48*100%=58%,目标类簇2的落脚率为29%,目标类簇3的落脚率为14.5%。车辆追踪系统根据落脚率类簇1大于类簇2大于类簇3,则确定待追踪车辆的下一次行驶轨迹点可能为胜太路。
[0120]
本实施例通过确定各个类簇中各个行驶轨迹点的记录时间,将各个类簇中各个行驶轨迹点的记录时间进行同一类簇时间对比,得到各个类簇中的各个时间差值;基于各个类簇中的各个时间差值确定各个类簇的同步性值;将各个类簇的同步性值与预设落脚次数阈值进行对比,确定同步性值大于或者等于预设落脚次数阈值对应的目标类簇;基于目标类簇确定待追踪车辆对应的落脚点。由此可知,本实施例在对待追踪车辆进行追踪的过程中,通过分析待追踪车辆的行驶轨迹点的落脚率预测待追踪车辆下一次行驶轨迹点的出现位置,从而使得根据预测出现位置有针对性的对待追踪车辆进行追踪,提高车辆的追踪效率。
[0121]
本申请还提供一种车辆的追踪装置。参照图4,图4是本申请车辆的追踪装置的功能模块示意图。所述车辆的追踪装置包括:
[0122]
接收模块10,用于接收用户发送的车辆信息;
[0123]
确定模块20,用于基于所述车辆信息确定对应的待追踪车辆,并确定所述待追踪车辆对应的车辆特征;
[0124]
所述确定模块20还用于基于所述车辆特征确定所述待追踪车辆的车辆记录表,并基于所述车辆记录表确定所述待追踪车辆各个类簇的行驶轨迹点;
[0125]
确定模块20还用于基于各个类簇的行驶轨迹点确定各个类簇的同步性值,基于各个类簇的同步性值确定所述待追踪车辆的落脚点。
[0126]
其中,上述车辆的追踪装置中各个模块的功能实现与上述车辆的追踪方法实施例中各步骤相对应,其功能和实现过程在此处不再一一赘述。
[0127]
本申请还提供一种计算机可读存储介质,该计算机可读存储介质上存储有车辆的追踪程序,所述车辆的追踪程序被处理器执行时实现如以上任一项实施例所述的车辆的追踪方法的步骤。
[0128]
本申请计算机可读存储介质的具体实施例与上述车辆的追踪方法各实施例基本相同,在此不作赘述。
[0129]
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的数据下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
[0130]
上述本申请实施例序号仅仅为了描述,不代表实施例的优劣。
[0131]
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多数据下前者是更佳的实施方式。基于这样的理解,本申请的技术方案本质上或者说对现有技术做出贡献的部分可以以软件货物的形式体现出来,该计算机软件货物存储在一个计算机可读存储介质(如rom/ram、磁碟、光盘)中,包括若干指令用以使得一台系统完成本申请各个实
施例所述的方法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1