AR实时定位方法、系统与流程
ar实时定位方法、系统
技术领域
1.本发明涉及计算机视觉领域,更为具体地,涉及一种ar实时定位系统方法、系统。
背景技术:
2.随着我们越来越依赖于移动设备,增强现实技术的采用将开始上升。随着绝大多数消费者拥有智能手机,并且已经随身携带智能手机,ar软件的发展将是前进的方向,这使其成为将ar几乎带给每个消费者的便捷媒介。而目前传统导航技术依赖可接收如gps,wifi,蓝牙信号等外部信号的接收装置。这些装置都存在软硬件成本较高,泛用性不强,定位精度不足,不具有通信能力,抗干扰能力较差等缺点。将ar技术与导航技术结合,既可以满足导航功能所需的高精度,高泛用性,强通信能力的要求,又降低了软硬件的开发维护成本,有很好的发展前景。
3.因此,亟需一种基于ar图片跟踪定位和惯性测距,能够实现实景与地图数据相叠加的ar实时定位方法、系统。
技术实现要素:
4.鉴于上述问题,本发明的目的是提供一种ar实时定位方法、系统,以解决的目前传统实时定位导航技术依赖可接收如gps,wifi,蓝牙信号等外部信号的接收装置。这些装置都存在软硬件成本较高,泛用性不强,定位精度不足,不具有通信能力,抗干扰能力较差的问题。
5.本发明提供的一种ar实时定位方法,其特征在于,包括:
6.建立跟踪识别图与世界坐标系下的定位图之间的相对关系以获取所述跟踪识别图的识别图方位;
7.扫描所述跟踪识别图以获取地图数据;其中,所述地图数据为所述跟踪识别图在ar坐标系中的相对位置;
8.将所述定位图与所述ar坐标系相对应,并根据所述识别图方位获取所述地图数据的中心点;
9.根据客户端的地理定位与所述地图数据的中心点,确定所述客户端的ar实时定位数据。
10.优选地,建立跟踪识别图与世界坐标系下的定位图之间的相对关系的过程包括:
11.将所述跟踪识别图置于所述定位图中;其中,所述定位图为所述世界坐标系下的cad图。
12.优选地,扫描所述跟踪识别图以获取地图数据的过程,包括:
13.通过匹配指令预先连接扫描装置与处理器;
14.通过所述扫描装置扫描所述跟踪识别图以形成扫描数据;
15.通过所述处理器获取所述扫描数据,并对所述扫描数据进行ar数据转换形成所述地图数据。
16.优选地,在根据所述识别图方位获取所述地图数据的中心点的过程中,包括:
17.根据所述识别图方位获取所述定位图与所述跟踪识别图之间的相对方向;
18.根据所述相对方向旋转所述地图数据以使所述地图数据的朝向与现实场景朝向保持一致。
19.优选地,在确定所述客户端的ar实时定位数据之前,还包括:基于所述ar坐标系建立ar锚点。
20.优选地,确定所述客户端的ar实时定位数据的过程,包括:
21.将所述ar锚点附属至实景中的物体中形成物理坐标;
22.在所述ar坐标系中对所述物理坐标进行等量平移、等量旋转以形成所述客户端所处环境的ar数据。
23.优选地,在确定所述客户端的ar实时定位数据的过程中,还包括进行惯性测距的过程,所述惯性测距的过程包括:
24.通过wifi接收器接收所有wifi信号;
25.基于所述所有wifi信号获取一次反射信号;
26.根据所述一次反射信号确定所述客户端在移动过程中产生的反射路径长度变化;
27.根据所述反射路径长度变化估算所述客户端经过的距离。
28.本发明还提供一种ar实时定位系统,其特征在于,用于实现前述的ar实时定位方法,包括:
29.方位获取单元,用于建立跟踪识别图与世界坐标系下的定位图之间的相对关系以获取所述跟踪识别图的识别图方位;
30.地图数据生成单元,用于扫描所述跟踪识别图以获取地图数据;其中,所述地图数据为所述跟踪识别图在ar坐标系中的相对位置;
31.中心点确定单元,用于将所述定位图与所述ar坐标系相对应,并根据所述识别图方位获取所述地图数据的中心点;
32.实时定位单元,用于根据客户端的地理定位与所述地图数据的中心点,确定所述客户端的ar实时定位数据。
33.优选地,所述地图数据生成单元包括扫描装置与处理器,其中,
34.所述扫描装置用于扫描所述跟踪识别图以形成扫描数据;
35.所述处理器用于对所述扫描数据进行ar数据转换形成地图数据。
36.优选地,所述实时定位单元包括锚点附属模块,其中,
37.所述锚点附属模块用于基于所述ar坐标系建立ar锚点,并将所述ar锚点附属至实景中的物体中形成物理坐标;
38.并且,所述锚点附属模块与所述处理器相连接。
39.从上面的技术方案可知,本发明提供的ar实时定位方法、系统,首先先建立跟踪识别图与定位图之间的相对关系以获取识别图方位;再扫描跟踪识别图以获取地图数据,而后将定位图与ar坐标系相对应,并根据识别图方位获取地图数据的中心点,再获取客户端的地理定位,并将客户端的地理定位与地图数据的中心点相结合以形成客户端的ar实时定位数据,解决单独依靠gps信号或wifi信号存在泛用性不强,定位精度不足,不具有通信能力,抗干扰能力较差的问题,仅对跟踪识别图进行扫描即可实现快速定位,不仅硬件成本
低,且提高效率。
附图说明
40.通过参考以下结合附图的说明书内容,并且随着对本发明的更全面理解,本发明的其它目的及结果将更加明白及易于理解。在附图中:
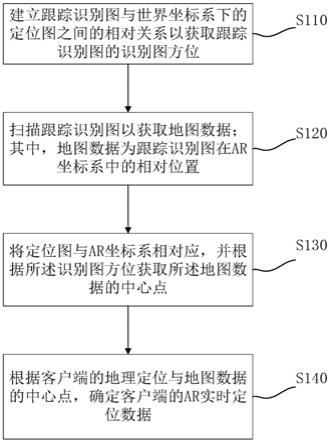
41.图1为根据本发明实施例的ar实时定位方法的流程图;
42.图2为根据本发明实施例的地图数据中心在ar坐标系下的位置计算示例;
43.图3为根据本发明实施例的对地图数据的朝向进行调整的示例;
44.图4为根据本发明实施例的ar实时系统的示意图。
具体实施方式
45.现有的实时定位导航技术依赖可接收如gps,wifi,蓝牙信号等外部信号的接收装置,这些装置都存在软硬件成本较高,泛用性不强,定位精度不足,不具有通信能力,抗干扰能力较差的问题。
46.针对上述问题,本发明提供一种ar实时定位方法,以下将结合附图对本发明的具体实施例进行详细描述。
47.为了说明本发明提供的ar实时定位方法,图1对本发明实施例的ar实时定位方法进行了示例性标示;图2对本发明实施例的ar实时定位系统进行了示例性标示。
48.以下示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。对于相关领域普通技术人员已知的技术和设备可能不作详细讨论,但在适当情况下,所述技术和设备应当被视为说明书的一部分。
49.如图1所示,本发明提供的本发明实施例的ar实时定位方法,包括:
50.s110:建立跟踪识别图与世界坐标系下的定位图之间的相对关系以获取所述跟踪识别图的识别图方位;
51.s120:扫描所述跟踪识别图以获取地图数据;其中,所述地图数据为所述跟踪识别图在ar坐标系中的相对位置;
52.s130:将所述定位图与所述ar坐标系相对应,并根据所述识别图方位获取所述地图数据的中心点;
53.s140:根据客户端的地理定位与所述地图数据的中心点,确定所述客户端的ar实时定位数据。
54.如图1所示的实施例,在步骤s110中,建立跟踪识别图与世界坐标系下的定位图之间的相对关系的过程包括:将跟踪识别图置于定位图中,该定位图的具体表现形式不作具体限制,可以为任意世界坐标系下的具有载图功能的图像生成或图像展示背景,在本实施例中,该定位图为世界坐标系下的cad图,cad图简洁明了,以便于扫描装置扫描置于cad图上的跟踪识别图。
55.如图1所示,在步骤s120中,扫描跟踪识别图以获取地图数据的过程,包括:
56.s121:通过匹配指令预先连接扫描装置与处理器;
57.s122:通过扫描装置扫描跟踪识别图以形成扫描数据;
58.s123:通过处理器获取扫描数据,并对扫描数据进行ar数据转换形成地图数据。
59.在步骤s121中,该匹配指令的具体表现形式在此不作限制,在本实施例中,通过匹配指令预先连接扫描装置与处理器的过程为:通过数据传输导线连接该扫描装置和处理器,预设连接按钮,当需要进行扫描分析操作时开启该按钮,使处理器向该扫描装置发送匹配指令,该扫描装置根据该匹配指令开始扫描,并将扫描数据传输至处理器,使处理器对扫描数据进行ar数据转换形成地图数据。
60.在图1所示的实施例中,在步骤s130中,将定位图与ar坐标系相对应,并根据识别图方位获取地图数据的中心点,的过程包括:
61.s131:根据识别图方位获取定位图与跟踪识别图之间的相对方向;
62.s132:根据相对方向旋转地图数据以使地图数据的朝向与现实场景朝向保持一致。
63.在图1所示的实施例中,,步骤s140为首先获取客户端的地理定位,并将客户端的地理定位与地图数据的中心点相结合以形成客户端的ar实时定位数据,步骤s140之前,即在确定客户端的ar实时定位数据之前,还包括基于ar坐标系建立ar锚点;
64.步骤s140中确定客户端的ar实时定位数据的过程,包括:
65.s141:将ar锚点附属至世界坐标系下的实景中的物体中形成物理坐标;
66.s142:在ar坐标系中对所述物理坐标进行等量平移、等量旋转以形成客户端所处环境的ar数据,并且在本实施例中,由处理器获取物理坐标,且由处理器对物理坐标进行等量平移、等量旋转以形成客户端所处环境的ar数据;
67.并且,在形成客户端的ar实时定位数据的过程中,还包括s143:进行惯性测距的过程,惯性测距的过程包括:
68.s143
‑
1:通过wifi接收器接收所有wifi信号;
69.s143
‑
2:基于所有wifi信号获取一次反射信号;
70.s143
‑
3:根据一次反射信号确定客户端在移动过程中产生的反射路径长度变化;
71.s143
‑
4:根据反射路径长度变化估算客户端经过的距离,需要说明的是,步骤s143并非严格在步骤s141、步骤s142之后执行,而是在整个步骤s140中穿插执行,具体的,当客户端在移动的过程中,ar锚点附属至实景中的物体中形成物理坐标时必然存在客户端移动所产生的漂移误差,而步骤s143致力于校正在步骤s141中产生的漂移误差。
72.如图2所示,在本发明的一个具体实施例中,计算地图数据中心在ar坐标系下的位置,设跟踪识别图在ar坐标系中的坐标为positon1=vector3(x1,y1,z1),跟踪识别图在在地图数据中的相对位置为positon2=vector3(x2,y2,z2),那么根据跟踪识别图与定位图的对应关系,可推算出地图数据中心位于ar坐标系中的位置position3,如下表1所示:
[0073][0074]
表1
[0075]
如图3所示,在本具体实施例中,获取地图数据的中心点之后再对地图数据的朝向进行调整,为了让ar坐标系下地图数据的朝向与实际地图数据的朝向重合,在每次定位后都可以将ar坐标系下的地图数据朝向旋转至如附图所示的朝向,并且,由于地图数据是在跟踪识别图所处的ar坐标系下进行位移的,所以其位移后的朝向与跟踪识别图所处的朝向相同,根据跟踪识别图所在的方位再对位移后地图数据中心进行旋转,具体运算如下表2所示:
[0076][0077]
表2
[0078]
通过上述实施方式可以看出,本发明提供的ar实时定位方法,首先需要建立跟踪识别图与定位图之间的相对关系以获取识别图方位;再扫描跟踪识别图以获取地图数据,而后将定位图与ar坐标系相对应,并根据识别图方位获取地图数据的中心点,再获取客户端的地理定位,并将客户端的地理定位与地图数据的中心点相结合以形成客户端的ar实时定位数据,解决单独依靠gps信号或wifi信号存在泛用性不强,定位精度不足,不具有通信能力,抗干扰能力较差的问题,仅对跟踪识别图进行扫描即可实现快速定位,不仅硬件成本低,且提高效率。
[0079]
如图4所示,本发明还提供一种ar实时定位系统100,用于实现前述的ar实时定位方法,其包括方位获取单元101、地图数据生成单元102、中心点确定单元103、实时定位单元104,其中,
[0080]
方位获取单101,用于建立跟踪识别图与世界坐标系下的定位图之间的相对关系
以获取跟踪识别图的识别图方位;
[0081]
地图数据生成单元102,用于扫描跟踪识别图以获取地图数据;其中,地图数据为跟踪识别图在ar坐标系中的相对位置;
[0082]
中心点确定单元103,用于将定位图与所述ar坐标系相对应,并根据识别图方位获取地图数据的中心点;
[0083]
实时定位单元104,用于根据客户端的地理定位与地图数据的中心点确定客户端的ar实时定位数据。
[0084]
其中,该地图数据生成单元102包括扫描装置102
‑
1与处理器102
‑
2,其中,
[0085]
该扫描装置102
‑
1用于扫描跟踪识别图以形成扫描数据;
[0086]
该处理器102
‑
2用于获取扫描数据,并对扫描数据进行ar数据转换形成地图数据。
[0087]
该实时定位单元104包括锚点附属模块104
‑
1,其中,
[0088]
该锚点附属模块104
‑
1用于基于ar坐标系建立ar锚点,并将ar锚点附属至实景中的物体中形成物理坐标;并且,该锚点附属模块104
‑
1与该处理器102
‑
2相连接,具体的实现细节如上述ar实时定位方法所述,在此不做赘述。
[0089]
通过上述实施方式可以看出,本发明提供的ar实时定位系统,首先先建立跟踪识别图与定位图之间的相对关系以获取识别图方位;再扫描跟踪识别图以获取地图数据,而后将定位图与ar坐标系相对应,并根据识别图方位获取地图数据的中心点,再获取客户端的地理定位,并将客户端的地理定位与地图数据的中心点相结合以形成客户端的ar实时定位数据,解决单独依靠gps信号或wifi信号存在泛用性不强,定位精度不足,不具有通信能力,抗干扰能力较差的问题,仅对跟踪识别图进行扫描即可实现快速定位,不仅硬件成本低,且提高效率。
[0090]
如上参照附图以示例的方式描述了根据本发明提出的ar实时定位方法、系统。但是,本领域技术人员应当理解,对于上述本发明所提出的ar实时定位方法、系统,还可以在不脱离本发明内容的基础上做出各种改进。因此,本发明的保护范围应当由所附的权利要求书的内容确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1