基于神经网络定位算法的快速成像方法及装置与流程
[0001]
本发明涉及一种成像方法及成像装置,尤其涉及一种基于神经网络定位算法的快速成像方法及装置。
背景技术:
[0002]
γ射线成像技术是一种对放射性物质“照相”的核辐射探测技术。自“anger”相机问世以来,人们便开始了γ射线成像技术的研究。现有的γ相机主要用于天文研究、核医学领域和核辐射监测领域。
[0003]
在医学成像领域,γ相机多采用平行束准直器成像,其空间分辨率高,但探测效率低、体积庞大、适用环境有限;且在医学诊断中引入病人体内的示踪核素的活度一般要达到10
6
bq量级,活度太高。不仅如此,由于其集光率低,核医学领域的伽马相机需要的成像时间长。例如北京滨松光电子技术股份有限公司的bhp6602型γ相机,显像方法为空腹静注na99tcmo
4 ,20min显像。该产品具有高的空间分辨和清晰的图像质量,但其重量达1500kg,仅适合在有限的场地条件下采用,故无法完成对低活度内污染的快速检测。
[0004]
在远场成像中,多采用工业伽马相机,如:中国科学院高能物理研究所研制的伽马相机ent33—011a,准直器为编码孔准直器,可在5min对40m处的活度为的cs-137放射源进行成像。成像时间短,灵敏度高,但放射源与探测器之间距离远。伽马近场成像与远场成像不同还需要考虑近场几何所造成的伪影对重建图像的干扰,因此工业伽马相机不适用于近场成像。
[0005]
另外,对于图像重建,多采用mlem迭代算法,该算法是重建图像中最常用的图像解码算法,但它仅在有限的迭代次数中有良好的效果。重建迭代次数达到一定次数之后,重建图像的质量会下降,即会出现棋盘效应,从而使得迭代过程产生非收敛性。在低活度内污染成像模拟中探测器接受到的光子数较少,获得的投影数据会伴随着较高的电子噪声,需要大量的迭代次数才能重建内污染图像,而增加了重建时间。
[0006]
名词解释:mpa-mura编码:对按编码规则形成的mura准直器进行中心化处理、四周延拓,形成mpa-mura编码孔准直器,且其开孔率为50%,材料选择常用且易加工的钨钢。放射源释放伽马射线经编码孔准直器入射到探测器上,与闪烁体作用。在探测器探测面建立坐标系并网格化,则可以统计一段时间内作用在网格上的伽马光子的计数,该计数则代表了辐射强度,我们称之为辐射强度值。
[0007]
参考文献:roberto accorsi. desigen of near-field coded aperture cameras for high-resolution medical and industrial gamma-ray imaging. ph d thesis, massachusetts institute of technology. 2001.该文献内容关于点源重建图像的品质因素,主要讲了高分辨率的近场伽马放射源成像,并给出了根据点源的重建图像品质的计算公式,我们利用该文章中公式,即可利用g4模拟得出的不同编码孔准直器厚度,不同源—探距下的点源重建图像,根据对点源的重建图像品质的比较,选择最优的编码孔准直器厚度和源—探距。
技术实现要素:
[0008]
本发明的目的就在于提供一种解决上述问题,可以对低活度放射源成像,可以减少近场伪影对重建图像的干扰,可以快速的重建出放射源图像的,一种基于神经网络定位算法的快速成像方法及装置。
[0009]
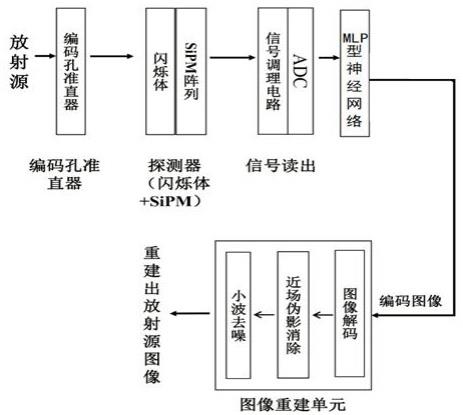
为了实现上述目的,本发明采用的技术方案是这样的:一种基于神经网络定位算法的快速成像方法,应用于基于神经网络定位算法的快速成像装置,所述装置包括依次连接的编码孔准直器、探测器和信号读出单元,所述探测器包括闪烁体,射线经编码孔准直器作用在闪烁体表面,由探测器转换为脉冲信号阵列、再经信号读出单元转换为探测器阵列响应矩阵,所述方法包括以下步骤:(1)根据探测范围确定编码孔准直器和探测器尺寸,在闪烁体表面建立坐标系,并将闪烁体表面均分为数个网格,每个网格对应一坐标;(2)训练一mlp型神经网络,得到网络模型,具体为:(21)获取其中一网格的训练数据:射线经编码孔准直器后入射至闪烁体表面的一个网格上,获取探测器阵列响应矩阵,将这一网格的坐标作为该探测器阵列响应矩阵对应的标签,则带便签的探测器阵列响应矩阵形成训练数据;(22)依次获取其余网格的训练数据;(23)以探测器阵列响应矩阵为输入,射线作用在闪烁体表面的位置为输出,该输入的标签为期望输出,用训练数据对mlp神经网络进行训练,得到网络模型;(3)对探测区域进行探测,所述探测区域内设有待测放射源;(4)待测放射源发出射线,经编码孔准直器作用在闪烁体表面,再由信号读出单元输出探测器阵列响应矩阵,发送至网络模型中,网络模型输出与探测器阵列响应矩阵对应的位置信息;(5)对时长t内,网络模型输出的位置信息进行统计,形成正编码图像;(6)编码孔准直器以中心为轴旋转90
°
,重复步骤(4),再对时长t内,网络模型输出的位置信息进行统计,形成反编码图像;(7)对正编码图像、和反编码图像进行周期延拓补零,再根据mlem算法,分别重建,得到正编码重建图像、和反编码重建图像;(8)正编码重建图像数据中每个网格的辐射强度值,减去反编码重建图像中每个网格的辐射强度值,得到初步重建图像;(9)对初步重建图像进行小波变换,得到低频和高频的信号,分别去噪后,小波逆变换得到最终重建图像。
[0010]
作为优选:所述步骤(1)中,根据探测范围确定编码孔准直器和探测器尺寸,具体为:(11)确定一正方形的成像范围,大小为fov;(12)选择探测器,确定探测器边长d
d
,其探测范围为d
d
×
d
d
,且探测范围完全覆盖成像范围;(13)确定物距a、和焦距b的比值;(14)确定编码孔准直器的编码方式和材料,确定编码孔准直器的边长d
m
的大小,
;(15)确定编码孔准直器中,孔的边长h
m
,并计算每行开孔个数n
m
=d
m
/h
m
;(16)选择闪烁体,确定采样系数β,并对整块闪烁体进行网格化,根据下式计算每行网格的个数n
d
、和网格边长h
d
;n
d
=n
m
×
β;h
d
=d
d
/n
d
;(17)根据点源重建图像的品质因素和探测效率,并仿真确定编码孔准直器的厚度、物距a、焦距b的数值;(18)根据探测器边长d
d
,选择sipm阵列。
[0011]
作为优选:所述步骤(9)中,分别去噪为:高频信号采用硬阈值去噪,低频信号采用基于差分曲率的各项异性扩散算法降噪。
[0012]
一种基于神经网络定位算法的快速成像装置,包括依次连接的编码孔准直器、探测器和信号读出单元,所述探测器包括闪烁体,射线经编码孔准直器作用在闪烁体表面,由探测器转换为脉冲信号阵列、再经信号读出单元转换为探测器阵列响应矩阵,还包括mlp型神经网络、事件统计单元、和图像重建单元;所述闪烁体表面建立有坐标系,并将闪烁体表面均分为数个网格,每个网格对应一坐标;所述mlp型神经网络包括一个输入层、两个隐藏层和一个输出层,所述mlp型神经网络以探测器阵列响应矩阵为输入,该输入对应射线作用在闪烁体表面的位置坐标为期望输出;所述事件统计单元用于对时长t内,射线作用在闪烁体表面的位置进行统计,形成编码图像,且编码孔准直器位置不变时得到的编码图像为正编码图像,编码孔准直器以中心为轴旋转90
°
时得到的编码图像为反编码图像;所述图像重建单元包括图像解码单元、近场伪影消除单元和小波去噪单元;所述图像解码单元,用于对正编码图像、和反编码图像进行周期延拓补零,再根据mlem算法,分别重建出正编码重建图像、和反编码重建图像;所述近场伪影消除单元,用于使正编码重建图像数据中每个网格的辐射强度值,减去反编码重建图像中每个网格的辐射强度值,得到初步重建图像;所述小波去噪单元,用于对初步重建图像进行小波变换,得到重建图像。
[0013]
作为优选:所述编码孔准直器采用mpa-mura编码,且横截面为正方形,开孔率为50%;所述闪烁体为整块正方形的labr3闪烁体,且探测器由闪烁体与sipm阵列耦合而成,所述闪烁体用于将编码后的放射源转换为可见光,所述sipm阵列用于将可见光转换为脉冲信号阵列并输出。
[0014]
作为优选:所述信号读出单元包括信号调理电路和adc,所述信号调理电路包括滤波电路和放大电路,用于对脉冲信号阵列进行滤波、放大后,送入adc,所述adc用于模数转换得到数字脉冲信号阵列,并提取阵列中每个数字脉冲信号的幅度值,形成探测器阵列响应矩阵。
[0015]
与现有技术相比,本发明的优点在于:
(1)首先,本发明采用编码孔准直器、探测器和信号读出单元、基于fpga的神经网络。编码孔准直器的开孔率高,使重建图像有高的探测效率;使用整块晶体,消除了小块晶体组合所需要的隔光材料,增加探测器的灵敏度;利用基于fpga的神经网络来定位射线入射在晶体表面的位置,无需获得伽玛射线作用深度信息,消除伽玛射线在晶体内部的散射和由反应深度造成的视差,提高探测器的探测效率。
[0016]
(2)并在探测器的闪烁体表面建立坐标系,将闪烁体表面网格化,网格化探测器有利于后续的重建运算,再用射线依次去照射网格得到对应的探测器阵列响应矩阵,从而将探测器阵列响应矩阵与网格坐标一一对应,用于后续mlp型神经网络的训练,从而得到准确的训练模型。
[0017]
(3)本发明在实际成像时,不仅仅用事件统计单元形成正编码图像,还需将编码孔准直器旋转90
°
得到反编码图像,再分别对正编码图像、反编码图像进行重建,得到正编码重建图像、和反编码重建图像,再进行相减操作,这样做能有效的消减近场伪影,得到初步的重建图像。
[0018]
(4)我们还对初步重建图像进行小波变换,对其高频部分进行硬阈值去噪,低频部分进行采用基于差分曲率的各项异性扩散算法降低噪声,再小波逆变换得到最终重建图像。基于该小波变化,能使图像重建速度更快,重建图像更加清晰。
[0019]
基于本发明的结构和方法,能对核事故中沉积在肺部的低、中、高能γ放射源近场成像;且建立了适用于内污染成像的整体模型。得到的图像,利用正编码重建图像和反编码重建图像进行相减操作,能有效降低近场伪影对重建图像的干扰,增加了图像的清晰度。且图像重建速度更快、图像更加清晰。另外,本发明装置及方法,具有结构简单、体积小、操作方便,探测效率高、重建速度快的优点。
附图说明
[0020]
图1为本发明装置结构框图;图2不同源-探距、编码孔准直器厚度下点源重建图像的品质因素;图3不同源-探距、编码孔准直器厚度下点源重建图像的探测效率;图4a为mpa-mura编码孔准直器示意图;图4b为探测器的闪烁体被网格化后的图;图5探测系统探测成年男性双肺的布设图;图6为mlp型神经网络示意图;图7a为点状放射源图像;图7b为圆环状放射源图像;图7c为不正规形状的放射源图像;图8a为编码图像经步骤(7)进行周期延拓补零后的图像图8b为是对mpa-mura编码孔准直器的矩阵函数进行处理的图像图9a为图7b的放射源图像经步骤(7)得到的正编码重建图像;图9b为图7b的放射源图像经步骤(7)得到的反编码重建图像;图9c为图9a和图9b经步骤(8)得到的初步重建图像;图10a为图7b的放射源图像经mlem algorithmen方法得到的最终重建图像;
图10b为图7b的放射源图像经p-m-mlemalgorithmen方法得到的最终重建图像;图10c为图7b的放射源图像经本发明方法得到的最终重建图像;图11a为图7c的放射源图像经mlem algorithmen方法得到的最终重建图像;图11b为图7c的放射源图像经p-m-mlemalgorithmen方法得到的最终重建图像;图11c为图7c的放射源图像经本发明方法得到的最终重建图像;图12为图7a中放射源图像经本发明方法得到的最终重建图像。
具体实施方式
[0021]
下面将结合附图对本发明作进一步说明。
[0022]
实施例1:参见图1到图6,一种基于神经网络定位算法的快速成像方法,应用于基于神经网络定位算法的快速成像装置,所述装置包括依次连接的编码孔准直器、探测器和信号读出单元,所述探测器包括闪烁体,射线经编码孔准直器作用在闪烁体表面,由探测器转换为脉冲信号阵列、再经信号读出单元转换为探测器阵列响应矩阵,所述方法包括以下步骤:(1)根据探测范围确定编码孔准直器和探测器尺寸,在闪烁体表面建立坐标系,并将闪烁体表面均分为数个网格,每个网格对应一坐标;(2)训练一mlp型神经网络,得到网络模型,具体为:(21)获取其中一网格的训练数据:射线经编码孔准直器后入射至闪烁体表面的一个网格上,获取探测器阵列响应矩阵,将这一网格的坐标作为该探测器阵列响应矩阵对应的标签,则带便签的探测器阵列响应矩阵形成训练数据;(22)依次获取其余网格的训练数据;(23)以探测器阵列响应矩阵为输入,射线作用在闪烁体表面的位置为输出,该输入的标签为期望输出,用训练数据对mlp神经网络进行训练,得到网络模型;(3)对探测区域进行探测,所述探测区域内设有待测放射源;(4)待测放射源发出射线,经编码孔准直器作用在闪烁体表面,再由信号读出单元输出探测器阵列响应矩阵,发送至网络模型中,网络模型输出与探测器阵列响应矩阵对应的位置信息;(5)对时长t内,网络模型输出的位置信息进行统计,形成正编码图像;(6)编码孔准直器以中心为轴旋转90
°
,重复步骤(4),再对时长t内,网络模型输出的位置信息进行统计,形成反编码图像;(7)对正编码图像、和反编码图像进行周期延拓补零,再根据mlem算法,分别重建,得到正编码重建图像、和反编码重建图像;(8)正编码重建图像数据中每个网格的辐射强度值,减去反编码重建图像中每个网格的辐射强度值,得到初步重建图像;(9)对初步重建图像进行小波变换,得到低频和高频的信号,分别去噪后,小波逆变换得到最终重建图像。
[0023]
所述步骤(1)中,根据探测范围确定编码孔准直器和探测器尺寸,具体为:(11)确定一正方形的成像范围,大小为fov;
(12)选择探测器,确定探测器边长d
d
,其探测范围为d
d
×
d
d
,且探测范围完全覆盖成像范围;(13)确定物距a、和焦距b的比值;(14)确定编码孔准直器的编码方式和材料,确定编码孔准直器的边长d
m
的大小,;(15)确定编码孔准直器中,孔的边长h
m
,并计算每行开孔个数n
m
=d
m
/h
m
;(16)选择闪烁体,确定采样系数β,并对整块闪烁体进行网格化,根据下式计算每行网格的个数n
d
、和网格边长h
d
;n
d
=n
m
×
β;h
d
=d
d
/n
d
;(17)根据点源重建图像的品质因素和探测效率,并仿真确定编码孔准直器的厚度、物距a、焦距b的数值;(18)根据探测器边长d
d
,选择sipm阵列。
[0024]
所述步骤(9)中,分别去噪为:高频信号采用硬阈值去噪,低频信号采用基于差分曲率的各项异性扩散算法降噪。经过这两次去噪,重建图像噪声降低约60%。
[0025]
一种基于神经网络定位算法的快速成像装置,包括依次连接的编码孔准直器、探测器和信号读出单元,所述探测器包括闪烁体,射线经编码孔准直器作用在闪烁体表面,由探测器转换为脉冲信号阵列、再经信号读出单元转换为探测器阵列响应矩阵,还包括mlp型神经网络、事件统计单元、和图像重建单元;所述闪烁体表面建立有坐标系,并将闪烁体表面均分为数个网格,每个网格对应一坐标;所述mlp型神经网络包括一个输入层、两个隐藏层和一个输出层,所述mlp型神经网络以探测器阵列响应矩阵为输入,该输入对应射线作用在闪烁体表面的位置坐标为期望输出;所述事件统计单元用于对时长t内,射线作用在闪烁体表面的位置进行统计,形成编码图像,且编码孔准直器位置不变时得到的编码图像为正编码图像,编码孔准直器以中心为轴旋转90
°
时得到的编码图像为反编码图像;所述图像重建单元包括图像解码单元、近场伪影消除单元和小波去噪单元;所述图像解码单元,用于对正编码图像、和反编码图像进行周期延拓补零,再根据mlem算法,分别重建出正编码重建图像、和反编码重建图像;所述近场伪影消除单元,用于使正编码重建图像数据中每个网格的辐射强度值,减去反编码重建图像中每个网格的辐射强度值,得到初步重建图像;所述小波去噪单元,用于对初步重建图像进行小波变换,得到重建图像。
[0026]
本实施例中,所述编码孔准直器采用mpa-mura编码,且横截面为正方形,开孔率为50%;所述闪烁体为整块正方形的labr3闪烁体,且探测器由闪烁体与sipm阵列耦合而成,所述闪烁体用于将编码后的放射源转换为可见光,所述sipm阵列用于将可见光转换为脉冲信号阵列并输出。所述信号读出单元包括信号调理电路和adc,所述信号调理电路包括滤波电路和放大电路,用于对脉冲信号阵列进行滤波、放大后,送入adc,所述adc用于模数转换得
到数字脉冲信号阵列,并提取阵列中每个数字脉冲信号的幅度值,形成探测器阵列响应矩阵。
[0027]
实施例2:参见图1到图6,本实施例中,我们需要对成年人体肺部内污染进行探测并快速成像,本实施例中,我们先建立一基于神经网络定位算法的快速成像装置,其结构同实施例1中的一种基于神经网络定位算法的快速成像装置。应用于该装置的具体的成像方法,包括以下步骤:(1)根据探测范围确定编码孔准直器和探测器尺寸,建立一基于神经网络定位算法的快速成像装置,具体可通过步骤(11)-(18)实现;(11)我们预设覆盖整个肺部的正方形范围为成像范围,大小为fov=300mm
×
300mm;(12)选择探测器为整块的labr3探测器,厚度为边长d
d
=301mm,则探测范围为301mm
×
301mm,能完全覆盖成像范围;(13)确定物距a和焦距b的比值,a:b=1:1;实际上,物距是指放射源到编码孔准直器的距离,焦距是指编码孔准直器到闪烁体表面的距离;(14)确定编码孔准直器的编码方式和材料,确定编码孔准直器的边长d
m
的大小,;本实施例中,编码方式为mpa-mura,材料优选为钨钢;(15)确定编码孔准直器中,孔的边长h
m
,并计算每行开孔个数n
m
=d
m
/h
m
;我们设h
m
=1mm,则开孔个数为:n
m
=d
m
/h
m
=300,因mura准直器的开孔个数必须为素数,因此取靠近300的数,即301为编码孔准直器的开孔个数,准直器的边长为301mm。
[0028]
(16)选择闪烁体,为labr3闪烁体,确定采样系数β=1,并对整块闪烁体进行网格化,根据下式计算每行网格的个数n
d
、和网格边长h
d
;n
d
=n
m
×
β=301
×
1=301;h
d
=d
d
/n
d
=301/301=1 mm;(17)根据点源重建图像的品质因素和探测效率,并仿真确定编码孔准直器的厚度、物距a、焦距b的数值;本实施例中,我们根据i-131的点源重建图像的品质因素和探测效率得到编码孔准直器的厚度为4mm,a=80mm,b=80mm;(18)根据探测器边长d
d
,选择有效面积合适的sipm和sipm阵列;sipm阵列由50
×
50个有效面积为6mm
×
6mm的sipm组成。
[0029]
(2)训练mlp型神经网络,得到网络模型,具体为;(21)获取一网格的训练数据:用射线束经编码孔准直器后入射至闪烁体表面的一个网格上,获取探测器阵列响应矩阵,并将网格坐标作为矩阵的标签,则带便签的探测器阵列响应矩阵形成了训练数据;(22)依次获取其余网格的训练数据;(23)以探测器阵列响应矩阵为输入,该输入的标签为期望输出,用训练数据对mlp神经网络进行训练,得到网络模型;(3)将基于神经网络定位算法的快速成像装置,置于探测区域进行探测,所述探测区域内设有待测放射源;(4)待测放射源发出射线,经编码孔准直器作用在闪烁体表面,再由信号读出单元输出
探测器阵列响应矩阵,发送至网络模型中,网络模型输出与探测器阵列响应矩阵对应的位置信息;(5)事件统计单元对时长t内,网络模型输出的位置信息进行统计,形成编码图像;(6)编码孔准直器以中心为轴旋转90
°
,重复步骤(4),并用事件统计单元对时长t内,网络模型输出的位置信息进行统计,形成反编码图像;(7)利用图像解码单元用于对正编码图像、和反编码图像进行周期延拓补零,再根据mlem算法,分别重建出正编码重建图像、和反编码重建图像;(8)正编码重建图像数据中每个网格的辐射强度值,减去反编码重建图像中每个网格的辐射强度值,得到初步重建图像;(9)对初步重建图像进行小波变换,得到低频和高频的信号,高频信号采用硬阈值去噪,低频信号采用基于差分曲率的各项异性扩散算法降低噪声,最后,小波逆变换得到最终重建图像。
[0030]
参见图2、图3;由于i-131是核事故中释放的常见核素,i-131释放量一直被用作事故严重程度的度量,其释放伽马射线能量365kev,属于中能伽马发射源。因此本实施例在实施例1、2的基础上,放射源以i-131为基准,模拟计算在等比例成像条件下,源-探距z、编码厚度,对i-131点源成像质量的影响,如图2,图3所示。
[0031]
图2是等比例成像条件下,不同源-探距z、不同编码厚度下,i-131点源重建图像品质因素,品质因素也称为fom,图3是等比例成像条件下,不同源-探距z、不同编码厚度下,i-131点源重建图像探测效率。可知,对于i-131点源,在不同源-探距条件下,当编码孔准直器厚度为4mm时,图像品质因素均呈现出一个局部最小值,即图像质量的最优点。因此,后续内污染成像模拟研究中,选择编码孔准直器的厚度t
m
=4mm。根据图2和图3可得,随着z距离的增加,图像质量逐渐变好,但探测效率逐渐降低。为了兼顾探测效率和成像质量,本文选取源-探距z为160 mm,物距a为80 mm,焦距b为80 mm。
[0032]
图4a为mpa-mura编码孔准直器,图中白色为开孔部分,黑色为不开孔部分;图4b为探测器的晶体网格化后的图。
[0033]
图5本发明的一个探测实例图,图中,左侧椭圆形表示成年男性人体模的双肺,宽为290mm,本实施例设计成像范围为300mm
×
300mm,以对双肺完整成像。
[0034]
图6为mlp型神经网络图,从图中可以看出,包含1输入层,2隐藏层,输入为探测器响应阵列,输出为坐标。
[0035]
实施例3:参见图6-图9c,基于实施例2,图7a、7b、7c为三张放射源图,本实施中,我们选择了三种不同形状的放射源,分别是图7a:点状放射源;图7b:圆环状放射源;图7c,不正规形状的放射源。且为了更好的说明效果,图7c中,我们采用了字母“cdut”这种图样来演示,实际上,不仅限于此图形。
[0036]
我们以图7b中放射源为例,该放射源经编码孔准直器、晶体后、经神经网络得到放射源的编码图像,如图8a左图所示,将其四周延拓补零,如图8a右图所示;图8b是对mpa-mura编码孔准直器矩阵函数进行处理;还是基于图7b的放射源,我们经本发明方法,分别得到其正编码图像、和反编码图像,经步骤(7)将处理后的编码图像数据和mpa-mura编码孔准直器矩阵函数放入mlem算法中,重建出初步的放射源图像。分别得到正编码重建图像、和反编码重建图像,如图9a,图9b所
示,再经步骤(8),得到初步重建图像,如图9c所示。对比图9a、图9b、图9c,我们可以看出,图9a中位于图像中的圆环型放射源区域计数较高,其余位置伪影计数较高。图9b中伪影位置和计数与9a相近,将9a和9b相减得到9c,噪声和伪影基本被消除,圆环型放射源的重建图像清晰。9c较9a而言,信噪比增加了254.17%。由此可见互补成像可有效的减少放射源重建图像的近场伪影。
[0037]
实施例4:基于本发明方法,我们与现有技术中的方法进行对比:具体参见图10a、图10b、图10c、图11a、图11b和图11c。。
[0038]
图10a、图10b、图10c,分别展示了图7b中的圆环状放射源经以下三种方法得到的重建图像。图11a、图11b、图11c,分别展示了图7c中的放射源经以下三种方法得到的重建图像。
[0039]
方法一:最大似然期望值重建算法,英文为mlem algorithmen;方法二:传统的各项异性扩散算法和最大似然期望重建算法的结合,英文为p-m-mlemalgorithmen。
[0040]
方法三:本发明方法。
[0041]
将图10a、图10b、图10c这三幅图进行比对,可以明显的看出,图10c、包含的伪影更少,图像清晰、质量高,即经本发明方法得到的图像优于方法一和方法二处理后的图像,可以在去噪的同时保持图像的纹理和边缘信息。图11a、图11b、图11c这三幅图进行比对,结论同上,也是图11c包含的伪影更少,图像清晰、质量高。
[0042]
为了进一步说明本发明方法重建速度快的效果,我们将图7c中的放射源图像,利用最大似然期望值重建算法、传统的各项异性扩散算法和最大似然期望重建算法的结合的方法、及本发明方法,在相似信噪比下的图像重建时间进行对比,得到表1:从表1可以明显看出,本发明重建速度快。
[0043]
实施例5:图12中展示了图7a中点源经本发明方法处理后,得到的重建图像。图中可以看出本发明方法可对活度为1.22
×
10
5
bq的低活度放射源在15.73s快速成像,且重建图像清晰可见。
[0044]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1