设计机构的制作方法
groebner basis.mechanism and machine theory 91(2015)21
‑
38.
11.7.ruixian liu,philippe serr
é
,jean
‑
rameau,a tool to check mobility under parameter variations in over
‑
constrained mechanisms,mechanism and machine theory 69(2013)44
‑
61.
12.8.c.mavroidis et al.,analysis and synthesis of over
‑
constrained mechanisms,1994.
13.9.o.selvi,structural and kinematic synthesis of over
‑
constrained mechanisms,2012.
14.10.c.mavroidis et al.,a spatial over
‑
constrained mechanism that can be used in practical applications,1995.
15.11.x.kong,kinematic analysis of a 6r single
‑
loop over
‑
constrained spatial mechanism for circular translation,2015.
16.12.wang et al.,three
‑
face over
‑
constrained scissor
‑
type lifting mechanism,2010.
17.13.y.chen,design of structural mechanisms,2003.
18.14.q.yin,t.yang,overconstrained analysis on spatial 6
‑
link loops,mechanism and machine theory 37(2002)267
‑
278.
19.贯穿本公开,表述“自由度”可以被写为dof。典型的机构是由通过完美机械接头连接在一起的刚体制成。典型的一dof机械接头是:旋转(revolute)、螺旋(screw)、棱柱形(prismatic)。典型的二dof机械接头为:圆柱形、带销的球形。典型的三dof机械接头为:球形、平面。典型的四dof机械接头为:球
‑
缸、缸
‑
平面。典型的五dof机械接头是球
‑
平面。尽管每个机械接头都以至少一的dof为特征,但机构的总体活动性或刚度与主体和接头的组织方式密切相关。运动对(kinematic pair)和dof在本领域中是众所周知的,例如从文献[13]中可知。
[0020]
现有技术提供了库茨巴赫
‑
格鲁布勒(kutzbach
‑
grubler)准则(也称为“移动性指数”)来计算机构的dof数。主体的数量记为n
b
且接头的数量记为n
j
,令n为接头的dof之和,每个独立考虑。然后,库茨巴赫
‑
格鲁布勒准则通过δ=n
‑
g(n
j
‑
n
b
+1)计算该机构的所谓移动性指数δ,其中g是不受约束的任意主体的dof数。对于平面或球形机构,g=3。对于空间机构,g=6。可以通过使用包括分别与刚体相关联的n
b
个节点和分别与接头关联的n
j
个弧的图来计算移动性指数。每个弧都标有相应接头的dof,这意味着n是所有标签的和。
[0021]
图1示出了平面移动机构以及主体和接头的标记图。清楚地,n
b
=n
j
=4,g=3,每个接头都是平面旋转并且以一dof为特征,所以n=4且δ=n
‑
g(n
j
‑
n
b
+1)=4
‑
3(4
‑
4+1)=1,如所预期的。
[0022]
图2示出了刚性组装件及其标记图。在此,n
b
=5,n
j
=6,g=3,每个接头具有一dof,因此n=6且δ=n
‑
g(n
j
‑
n
b
+1)=6
‑
3(6
‑
5+1)=0,如所预期的。
[0023]
不幸的是,已知在许多现实情况下,特别是在本公开的上下文中,库茨巴赫
‑
格鲁布勒准则是有问题的。该缺点在图3中示出。该机构以与图2中相同的主体和接头布置(但是尺寸不同)为特征,因此δ=0,尽管它是可移动的(选择示例以使移动性在直观上明显)。
[0024]
过度约束的移动机构的现有技术定义如下。如果移动机构的对应库茨巴赫
‑
格鲁
布勒指数δ为非正值:δ≤0,则它受到过度约束。当实现特殊关系时,过度约束机构的移动性是有效的。这种关系将主体的尺寸转化为代数公式,并被称为“移动性条件”。例如,当且仅当l2=l4=l5并且l1=l3时,前面的五杆平面机构(five bars planar mechanism)才是可移动的。
[0025]
一类典型的过度约束的移动空间机构是由通过旋转接头连接的主体环组成。如图4所示,每个主体的尺寸由杆长度l和旋转轴线之间的角度α确定。
[0026]
根据环中主体的数量,将这些机构命名为4r、5r、6r、7r等,如图5所示。字母“r”表示杆通过旋转接头连接。
[0027]
由两个或三个主体组成的环绝对是刚性的。相反,由四个、五个或六个主体组成的环通常是刚性的,但是当实现某个特定的移动性条件时,它可以是可移动的。例如,4r机构的移动性条件为:
[0028]
l1=l3[0029]
l2=l4[0030]
α1=α3[0031]
α2=α4[0032]
l
2 sinα3+l
3 sinα2=0
[0033]
其中,对于i=1,
…
,4,l
i
和α
i
是相应的主体尺寸。最后,由至少七个主体7r、8r等组成的环始终是可移动的。
[0034]
下表收集了这些结果:
[0035]
n
b
δ普通行为具体行为学术用语学术用语3
‑
3刚性
‑‑‑4‑
2刚性过度约束可移动4rbennett5
‑
1刚性过度约束可移动5rgoldberg60刚性过度约束可移动6rbricard71可移动
‑
7r
‑
n>7n
‑
6可移动
‑
nr
‑
[0036]
一个基本的缺点是移动性条件通常无法达到。经过多年的机构社区理论研究,其针对非常特殊的过度约束机构(bennett 4r、goldberg 5r、bricard 6r)而已知。但是,根据文献[4],无法通过高效的算法来获得移动性条件。这使得过度约束的移动机构无法在与cad系统兼容的时间范围内创建和编辑。
[0037]
结果是,如今,只有很少的过度约束机构对工业有所贡献,这是因为它们的设计非常困难。大多数设计人员都不知道过度约束机构及其属性的存在。有时,工程师可能进行关于某种机构的工作而不知道它是过度约束的。由于被设计的过度约束机构的行为类似于刚性结构,因此工程师通过添加至少一个机械主体和一个机械接头来获得适当的运动。根据行业经验,这是从刚性的机构设计移动机构的最直接的方法。但是,该操作导致三个缺点。第一个缺点是由于主体和接头数量而造成的附加制造成本。第二个缺点是要控制的附加参数。第三个缺点是由于主体数量而导致的附加运输成本。相反,过度约束的移动机构将以更少的主体和更少的接头来实现相同的功能,从而降低成本。
[0038]
例如,图6示出了基于6r过度约束的移动机构的平台。图7所示的对应的等约束平
台基于六个执行器(actuator)。6r平台涉及约六个主体,而执行器平台涉及约十二个主体。过度约束的移动机构的另一种工业应用是基于空间6r过度约束机构的工业振动混合器,如图8所示。
[0039]
过度受限的移动机构在其中有用的工业领域包括机械手机器人和平面机构网络。实际上,机械手机器人需要受控的轴并需要大量的dof来工作,这导致了昂贵的机器。而且,对于给定的任务,这种灵活性可能并不总是必需的。作为平面机构的网络,与单个过度约束的机构相比,平面机构单元可能需要更多的链接(link)才能实现相同的运动。因此,如果简单且快速地创建这些过度约束的机构,则更多的工业应用将可以利用更简单的机构来实现相同的功能。文献[8
‑
13]涉及这些主题。
[0040]
在该上下文内,仍然需要用于设计包括刚性主体和机械接头的机构的改进的解决方案。
技术实现要素:
[0041]
因此,提出一种用于设计包括刚体和机械接头的机构的计算机实现的方法。该机构具有包括尺寸参数和位置参数的参数。该机构还具有涉及参数值的闭合方程(closure equation)。该方法包括提供输入参数值。输入参数值表示在输入状态下的机构。输入参数值包括输入尺寸值。该方法还包括确定输出参数值。输出参数值表示在输出状态下的机构。输出参数值包括输出尺寸值。所述确定包括在约束下最小化目标函数。目标函数对输出尺寸值和输入尺寸值之间的距离进行惩罚。约束包括表示通过输出参数值验证闭合方程的第一约束。约束还包括表示在输出状态下机构的移动性的第二约束。
[0042]
该方法可以包括以下一项或多项:
[0043]
‑
所述第二约束是表示在输出状态下的所述机构的二阶移动性的等式约束;
[0044]
‑
所述目标函数是可微的,并且所述最小化包括找到拉格朗日映射导数的零,所述拉格朗日映射导数基于在具有拉格朗日乘数的所述目标函数中插入约束;
[0045]
‑
所述目标函数是两次可微的,并且所述找到包括从对应于所述输入状态的点开始对对应于向量场的微分方程积分,所述向量场的每个稳定平衡点为拉格朗日映射导数的零;
[0046]
‑
所述微分方程是以下类型的:其中:l表示拉格朗日映射,x表示所述最小化的未知数,并且λ表示拉格朗日乘数;
[0047]
‑
所述等式约束是以下类型的:
[0048]
f(u,p)=0
[0049]
f
p
(u,p)v=0
[0050]
f
p
(u,p)vv+f
pp
(u,p)w=0
[0051]
‖v‖2‑
1=0
[0052]
<v,w>=0
[0053]
其中:
[0054]
■
f表示闭合方程,
[0055]
■
u表示机构的尺寸值,
[0056]
■
p表示机构的位置值,
[0057]
■
v表示机构的轨迹的切线,并且
[0058]
■
w表示轨迹的曲率
[0059]
‑
所述约束还包括表示刚性接头缺失的第三约束;
[0060]
‑
其中,所述第三约束是以下类型的:
[0061][0062]
其中:
[0063]
■
β表示标量,
[0064]
■
v
i
表示v的坐标i,并且
[0065]
■
u
i
表示u的坐标i;和/或
[0066]
‑
所述约束还包括第四约束,所述第四约束表示在所述输出状态下所述机构的非退化。
[0067]
还提供了一种计算机程序,其包括用于执行所述方法的指令。
[0068]
还提供了一种其上记录有所述计算机程序的计算机可读存储介质。
[0069]
还提供了一种系统,该系统包括耦合到存储器的处理器和图形用户界面,该存储器上记录有所述计算机程序。
附图说明
[0070]
现在将通过非限制性示例并参考附图来描述本发明的实施例,在附图中:
[0071]
‑
图1
‑
5示出了与机构设计有关的概念。
[0072]
‑
图6
‑
8示出了移动机构的示例的图片;
[0073]
‑
图9示出了系统的图形用户界面的示例;
[0074]
‑
图10示出了系统的示例;
[0075]
‑
图11
‑
21示出了该方法;并且
[0076]
‑
图22
‑
29示出了该方法。
具体实施方式
[0077]
提出了一种用于设计包括刚体和机械接头的机构的计算机实现的方法。该机构具有包括尺寸参数和位置参数的参数。该机构还具有涉及参数值的闭合方程。该方法包括提供输入参数值。输入参数值表示在输入状态下的机构。输入参数值包括输入尺寸值。该方法还包括确定输出参数值。输出参数值表示在输出状态下的机构。输出参数值包括输出尺寸值。所述确定包括在约束下最小化目标函数。目标函数对输出尺寸值和输入尺寸值之间的距离进行惩罚。约束包括表示通过输出参数值验证闭合方程的第一约束。约束还包括表示在输出状态下机构的移动性的第二约束。
[0078]
这种方法形成了用于设计包括刚体和机械接头的机构的改进方案。
[0079]
特别地,该方法从输入参数值确定输出参数值。因此,该方法允许从输入状态开始将机构置于输出状态。状态的这种变化形成了机构的设计步骤。该设计步骤由优化程序执
行,即在约束条件下最小化目标函数。这实现了该方法的效率。
[0080]
现在,第一约束确保从优化产生的参数值验证闭合方程。结果,通过该方法设计的机构处于输出状态,在该状态下该机构是闭合的,换言之,是组装的。由于机构意在被组装以使用,因此第一约束允许对机构进行与工业相关的设计。
[0081]
另外,第二约束确保了由优化产生的参数值代表了呈现移动性的机构。由于机构意在是可移动的以便正常工作(相对于刚性),因此第二约束条件允许对机构进行与工业相关的设计。该机构可以特别地验证输出状态下的移动性条件。换句话说,通过该方法设计的机构可以是移动机构。
[0082]
因此,第一和第二约束一起可以允许获得正常工作的移动机构。因此,由该方法输出的设计可以用于仿真目的,和/或用于制造现实世界中的对应物理机构。
[0083]
贯穿所公开的方法,机构可以包括刚体的相同组合和机械接头的相同组合,全部以相同的布置(所述布置指的是哪些刚体连接在一起以及通过哪个机械接头连接)。只有机构的参数值可以改变,换句话说,机构元件的尺寸和/或位置可以改变。换句话说,从输入状态到输出状态,构成机构的刚体和机械接头的类型都保持相同,并且都保持相同的布置中,但是输出参数值的集合可能与输入参数值的集合不同。然而,在该方法之后,该机构可以以任何方式进一步修改,例如通过添加和/或更换刚体。这样的后处理修改不在本公开的范围内。
[0084]
所谓该机构的“状态”,在此是指该机构可以利用参数的不同值采取的不同配置。例如,图2和图3示出了相同的机构,但是由于刚性杆的尺寸不同而处于不同的状态。相反,图1示出了与图2和图3不同的机构,这是由于图1的机构仅具有四个杆,而不是五个杆。并且,图5从左到右代表三种不同的机构:4r、5r和6r。为了完整起见,这里要注意的是,本公开中的术语“状态”不指代移动机构可以采取的不同位置,而是如所解释的,指代相同类型/类别的移动机构的不同实例。
[0085]
因此,该方法特别是基于机构的闭合方程仅处理机构的参数值。该机构的参数值确实可以被包括在最小化的自由变量/未知变量之中。因此,最小化编辑机构的尺寸参数值和/或位置参数值,以使机构处于组装且可移动的状态。
[0086]
根据定义,该机构的闭合方程是以该机构的所有参数为自变量的方程,并且当参数值验证该方程时,该机构就被组装/闭合。可以以任何方式提供闭合方程,并且例如可以对该方法预先确定闭合方程。闭合方程可以例如从闭合方程库中获得,每个闭合方程库都针对给定类型的机构而提供。可替代地,可以由用户以任何已知方式在该方法之前建立闭合方程。为了完整起见,在此指出,允许建立任何给定机构的闭合方程的数学本身是已知的(稍后提供示例实施方式)。
[0087]
在前面提供的含义中,该机构可能会受到过度约束。在这种情况下,用户编辑是困难的,但是该方法提供了实现工业和功能设计的自动方式。
[0088]
在该方法的第一个应用中(其中,机构可能收到过度约束或没有过度约束),可以在输入状态(即未闭合,或打开)下拆卸(disassemble)该机构,并且该方法允许通过编辑尺寸和/或位置参数来组装该机构。由于输入参数值未验证闭合方程,因此可以在输入状态下拆卸该机构。这可能是因为输入参数值包括输入位置值,输入位置值与输入尺寸参数值一起通过几何方式表示处于拆卸状态的机构。可能会出现这种情况,是因为输入的尺寸值根
本没有在物理上实现机构的组装,或者是因为输入的尺寸值在物理上实现机构的组装,但是输入的位置值没有实现这种组装。可替代地,这可能是因为输入参数值缺少一些参数的值,例如因为它们甚至不包括输入位置值。
[0089]
在该方法的第二个应用中(其中,机构可能受到过度约束或没有过度约束),该机构可以被组装但在输入状态下是刚性的,并且该方法允许通过编辑尺寸和/或位置参数使其是可移动的。该机构可以被组装但是在输入状态下是刚性的,这是因为尽管该机构被组装,但是输入尺寸参数值不允许该机构的任何移动性。例如,这就是图2所示处于刚性状态的机构的情况,与图3相反,图3示出了在移动状态下的同一机构。
[0090]
在该方法的第三个应用中(其中,机构可能受到过度约束或没有过度约束),该机构可以在输入状态下被拆卸,但能够通过仅重新放置来组装,并且该方法允许通过编辑尺寸和/或位置参数来进行组装。在这种情况下,输入尺寸值可以使得仅仅重新放置就可以得到刚性组装,并且该方法还不仅允许组装机构,而且还允许通过编辑参数(包括尺寸参数)使其是可移动的。
[0091]
在上述申请的可替代或累积的方法的第四个应用中,该方法可以用于编辑现有机构的一个或多个参数值,例如一个或多个尺寸值。用户可以例如设置一个或多个目标尺寸参数值,并且该方法可以将这些目标并入优化问题(这可以简单地通过从最小化中移除来自可优化未知量集合的相关联的参数值来完成)。该机构在输入状态下可能特别是过度约束和/或可移动的,并且可能被组装。在这种情况下,该方法允许在保持机构的移动性的同时改变参数值。在这样的应用的实施方式中,该机构可以处于输入状态,其处于刚性状态并且可选地与目标尺寸值相关联,或者是过度约束的、移动并且强制性地与目标尺寸值相关联。在这样的第四应用中,一个或多个目标值可以被限制为一个目标值,例如一个目标尺寸参数值。这降低了朝着非移动解决方案收敛的风险(相对于几个目标尺寸参数值)。
[0092]
该方法可以被嵌入在用户
‑
机器交互中。用户
‑
机器交互可以包括提供构成机构的刚体和机械接头的布置。
[0093]
例如,这可以通过用户选择刚体和机械接头的类型并在设计中实例化它们来执行。刚体和/或机械接头的图形表示可以显示给用户。用户可以定义尺寸参数值和/或位置参数值。可以例如使用用户与显示器的图形交互来定义位置参数值,例如经由触觉设备(例如鼠标或触摸设备,例如触摸板或触摸屏)。图形交互可以包括将刚体和/或机械接头的图形表示拖放到显示器的特定位置。以这种方式,用户可以定义机构的输入状态,这将输入参数值提供给最小化。由于这种人机交互,特别是在过度约束的机构下,输入状态几乎必然是这样的状态:该机构要么被拆卸,要么已经被组装/能够被组装但是是刚性的。用户可以特别地组装该机构,但是仅可以近似地组装,例如由于图形交互及其不可避免的不准确性。即使用户努力组装该机构,但是如果该机构过度约束,则通常对于用户来说将很难编辑参数值并找到移动状态。该方法辅助用户这样做,从而改善了移动机构设计的人体工程学。
[0094]
这可以通过用户调用现有的移动机构并请求改变所述机构来执行,例如通过编辑尺寸参数值。机构的刚体和/或机械接头的图形表示可以显示给用户。例如,可以利用用户与显示器的图形交互来执行尺寸参数的编辑,例如通过触觉设备(例如鼠标或触摸设备,例如触摸板或触摸屏)。图形交互可以包括将刚体和/或机械接头的图形表示的末端拖放到显示器的某个位置。该方法允许维持机构的移动性。
[0095]
在所有情况下,该机构都可能是现有技术中移动性条件未知的机构。当此移动性条件未知时,其自动计算将在合理的时间范围内无法实现。该方法可以允许在不知道移动性条件的情况下在保持移动性的同时改变移动机构的尺寸,即使该机构被过度约束。该方法可以可替代地或附加地允许在不知道移动性条件的情况下将刚性结构改变为过度约束的移动机构。
[0096]
实践中,除了输入尺寸值之外,输入参数值还可以包括输入位置值。附加地或可替代地,除了输出尺寸值之外,输出参数值还可包括输出位置值。
[0097]
实践中,输入参数值可以包括用于每个位置参数的相应的输入位置值和用于每个尺寸参数的相应的输入尺寸值,和/或输出参数值可以包括用于每个位置参数的相应的输出位置值和用于每个尺寸参数的相应的输出尺寸值。可选地,如上所述,可以进一步将一个且仅一个目标尺寸值输入至最小化。
[0098]
目标函数可以是惩罚输出尺寸值和输入尺寸值之间的距离的任何成本。为了该方法的有效实施,目标函数可以是可微的,或者甚至是两次可微的。目标函数可以例如与距离的平方成正比。
[0099]
该方法是计算机实现的。这意味着该方法的步骤(或基本上所有步骤)由至少一台计算机或任何类似系统执行。因此,该方法的步骤可以由计算机执行,可能是全自动执行,或者是半自动执行。在示例中,可以通过用户
‑
计算机交互来执行该方法的至少一些步骤的触发。所需的用户
‑
计算机交互水平可能取决于预见的自动化级别,并与实现用户愿望的需求保持平衡。在示例中,该水平可以是用户定义的和/或预定义的。
[0100]
方法的计算机实施方式的典型示例是使用适用于此目的的系统来执行该方法。该系统可以包括耦合到存储器的处理器和图形用户界面(gui),该存储器在其上记录有计算机程序,该计算机程序包括用于执行该方法的指令。存储器还可以存储数据库。存储器是适合于这种存储的任何硬件,可能包括几个物理不同的部分(例如,一个用于程序,并且可能一个用于数据库)。
[0101]
该方法通常操纵建模对象。建模对象是由存储在例如数据库中的数据定义的任何对象。通过扩展,表述“建模对象”表示数据本身。根据系统的类型,可以通过不同种类的数据来定义建模对象。该系统确实可以是cad系统、cae系统、cam系统、pdm系统和/或plm系统的任何组合。在那些不同的系统中,建模对象由对应的数据定义。因此,可以提到cad对象、plm对象、pdm对象、cae对象、cam对象、cad数据、plm数据、pdm数据、cam数据、cae数据。然而,这些系统并不是彼此排斥的,因为可以通过与这些系统的任何组合相对应的数据来定义建模对象。如从下面提供的这种系统的定义将显而易见的是,系统因此也可以是cad和plm系统二者。
[0102]
所谓cad系统,另外意味着至少适于基于建模对象的图形表示来设计建模对象的任何系统,例如catia。在这种情况下,定义建模对象的数据包括允许表示建模对象的数据。cad系统可以例如使用边或线(在某些情况下用面或表面)来提供cad建模对象的表示。线、边或表面可以各种方式表示,例如非均匀有理b样条(nurbs)。具体而言,cad文件包含可以从中生成几何图形的规范,规范转而允许生成表示。建模对象的规范可以存储在单个cad文件中,也可以存储在多个cad文件中。代表cad系统中建模对象的文件的典型大小在每零件1mb的范围内。并且建模对象通常可以是数千个零件的组装件。
[0103]
在cad的上下文中,建模对象通常可以是3d建模对象(例如代表产品,例如零件或零件的组装件),或者可以是产品组装件。所谓“3d建模对象”,是指由允许其3d表示的数据建模的任何对象。3d表示允许从所有角度查看零件。例如,当被3d表示时,3d建模对象可以被处理并围绕其任何轴或围绕显示表示的屏幕中的任何轴来旋转。特别是,这不包括未进行3d建模的2d图标。3d表示的显示促进设计(即,提高设计人员统计上完成其任务的速度)。由于产品的设计是制造过程的一部分,因此可以加快工业制造过程。
[0104]
通过该方法设计的3d建模对象可以表示在用例如cad软件解决方案或cad系统完成其虚拟设计之后,要在现实世界中制造的移动机构的几何形状。
[0105]
移动机构可以属于(即用于)各种不受限的工业领域,包括:航空航天、建筑、建造、消费品、高科技设备、工业设备、运输、船舶和/或海上石油/天然气生产或运输。
[0106]
移动机构由通过完美机械接头连接在一起的刚体制成,并且其可以以任何dof为特征。
[0107]
机械接头可以从以下任何一种机械接头之中选择:
[0108]
‑
一dof机械接头,包括:旋转、螺旋、棱柱形;
[0109]
‑
二dof机械接头,包括:圆柱、带销的球形;
[0110]
‑
三dof机械接头,包括:球形、平面。四dof机械接头为:球
‑
缸、缸
‑
平面;
[0111]
‑
五dof机械接头,包括:球
‑
平面。
[0112]
刚体可以包括(直的或不直的)杆,或者可以由段表示的任何刚体。众所周知,允许机构设计的cad系统将刚体表示为在两个机械接头之间定义的段。
[0113]
移动机构可能会受到过度约束。可移动机构可以形成机械手机器人、平面机构网络、汽车机构或本文呈现的任何其他类型的机构(尤其是在背景部分中,包括通过旋转接头连接的平面或非平面的主体环),或者是其一部分。
[0114]
图9示出了系统的gui的示例,其中,该系统是cad系统。图9所示的3d建模对象表示一种机构:具有旋转移动性(盘)和平移移动性(制动片)的盘式制动器。
[0115]
gui 2100可以是典型的类似于cad的界面,其具有标准菜单栏2110、2120以及底部和侧面工具栏2140、2150。此类菜单栏和工具栏包含一组用户可选图标,每个图标与如本领域中已知的一种或多种操作或功能相关联。这些图标中的一些与软件工具相关联,软件工具适于编辑gui 2100中显示的3d建模对象2000和/或在gui 2100中显示的3d建模对象2000上工作。软件工具可以被分组为工作台。每个工作台均包含软件工具的子集。特别地,工作台之一是适合于编辑建模产品2000的几何特征的编辑工作台。在操作中,设计人员可以例如预先选择对象2000的一部分,并且然后发起操作(例如更改尺寸、颜色等)或通过选择适当的图标来编辑几何约束。例如,典型的cad操作是对显示在屏幕上的3d建模对象的打孔或折叠进行建模。gui可以例如显示与所显示的产品2000有关的数据2500。在该图的示例中,显示为“特征树”的数据2500及其3d表示2000涉及包括制动钳和盘的制动组装件。gui可以进一步示出各种类型的图形工具2130、2070、2080,例如用于促进对象的3d朝向,用于触发对编辑产品的操作的仿真或渲染所显示产品2000的各种属性。光标2060可以由触觉设备控制以允许用户与图形工具进行交互。
[0116]
图10示出了系统的示例,其中,该系统是客户端计算机系统,例如用户的工作站。
[0117]
该示例的客户端计算机包括连接至内部通信总线1000的中央处理单元(cpu)
1010、也连接至总线的随机存取存储器(ram)1070。客户端计算机还被提供有图形处理单元(gpu)1110,其与连接到总线的视频随机存取存储器1100相关联。视频ram 1100在本领域中也称为帧缓冲器。大容量存储设备控制器1020管理对大容量存储设备(例如硬盘驱动器1030)的访问。适合于有形地体现计算机程序指令和数据的大容量存储设备包括所有形式的非易失性存储器,包括例如半导体存储器设备,例如eprom,eeprom和闪存设备;磁盘,例如内部硬盘和可移动磁盘;磁光盘;以及cd
‑
rom盘1040。上述任何内容可以通过专门设计的asic(专用集成电路)进行补充或并入专门设计的asic中。网络适配器1050管理对网络1060的访问。客户端计算机还可以包括触觉设备1090,例如光标控制设备、键盘等。在客户端计算机中使用光标控制设备以允许用户将光标选择性地定位在显示器1080上的任何期望位置处。此外,光标控制设备允许用户选择各种命令并输入控制信号。光标控制设备包括多个信号生成设备,用于将控制信号输入到系统。通常,光标控制设备可以是鼠标,该鼠标的按钮用于生成信号。可替代地或附加地,客户端计算机系统可以包括敏感垫和/或敏感屏幕。
[0118]
计算机程序可以包括可由计算机执行的指令,指令包括用于使上述系统执行该方法的单元。该程序可以是可记录在任何数据存储介质上的,包括系统的存储器。该程序可以例如以数字电子电路或计算机硬件、固件、软件或它们的组合来实现。该程序可以被实现为装置,例如有形地体现在机器可读存储设备中以由可编程处理器执行的产品。方法步骤可以通过以下方式来执行:可编程处理器执行指令程序以通过对输入数据进行操作并生成输出来执行该方法的功能。因此,处理器可以是可编程的并且被耦合以从数据存储系统、至少一个输入设备和至少一个输出设备接收数据和指令,以及向数据存储系统、至少一个输入设备和至少一个输出设备发送数据和指令。如果被期望,可以以高级过程或面向对象的编程语言或汇编或机器语言来实现应用程序。在任何情况下,该语言都可以是编译语言或解释语言。该程序可以是完整的安装程序或更新程序。在任何情况下,程序在系统上的应用引起执行该方法的指令。
[0119]“设计3d建模对象”指定任何动作或一系列动作,其是阐述3d建模对象的过程的至少一部分。因此,该方法可以包括从头开始创建3d建模对象。可替代地,该方法可以包括提供先前创建的3d建模对象,并且然后修改3d建模对象。
[0120]
该方法可以被包括在制造过程中,该制造过程可以包括在执行该方法之后,产生与建模对象相对应的物理产品。在任何情况下,通过该方法设计的建模对象都可以代表制造对象。因此,建模对象可以是建模实体(即表示实体的建模对象)。制造对象可以是产品,例如零件或零件的组装件。因为该方法改善了建模对象的设计,所以该方法还改善了产品的制造,从而提高了制造过程的生产率。
[0121]
现在参考图11
‑
21讨论该方法的实施方式。
[0122]
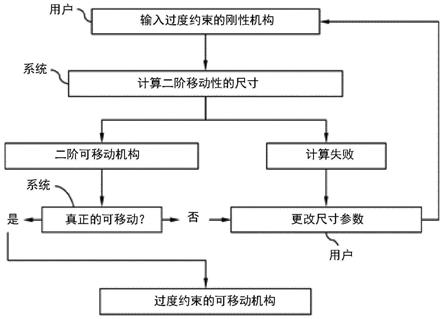
给定输入过度约束的机构,该方法的实施方式计算可移动至第二阶的相似机构。原理是将输入机构的尺寸参数投影到二阶移动机构的尺寸参数集上。可以使用附加方程来避免刚性接头和尺寸消失。投影问题是通过二次优化问题连同非线性约束来建模的。通过经典的拉格朗日变换,优化问题改变为寻根问题,然后其又改变为常微分方程。微分方程的初始条件是输入机构。未知机构(以二阶可移动)是微分方程的稳定平衡点。该平衡点是通过从初始条件(例如,在足够大的时间间隔内)对微分方程的数值积分获得的。可以使用标准的运动学求解器检查解决方案的真实移动性。这在图11中示出。
[0123]
与现有技术相比,该方法的实现是一种实际的解决方案,其能够创建或修改可移动的过度约束且非退化的机构。如前所述,这使得工程师可使用过度约束的机构的设计,这转而又打开了新一代有利机构的领域。
[0124]
该方法的实现可以允许两种输入。第一种是刚性的过度约束组装件,可选地与目标尺寸值关联。第二种是强制性地与目标尺寸值相关联的过度约束的可移动机构。在所有情况下,该方法的实现目的是提供一种以目标尺寸值(当目标尺寸值被给出时)为特征的移动机构。
[0125]
机构方程
[0126]
从数学角度来看,该机构是通过所谓的闭合映射f:u
×
p
→
e建模的,其中其中u是尺寸参数的空间,p是位置参数的空间,并且e是目标空间。闭合方程为f(u,p)=0。如果f(u0,p0)=0且在实参t的位置参数的空间中存在平滑曲线使得对于所有t而言q(0)=p0,且对于所有t而言f(u0,q(t))=0,则解u0,p0是“真正可移动的”,或简称为“可移动的”。在该方法的实现的上下文中,这种抽象水平就足够了。
[0127]
详细的闭合方程
[0128]
闭合方程通过专用的数学对象捕获拓扑和几何信息。拓扑涉及通过机械接头进行的刚体的逻辑连接。几何涉及相应主体的尺寸以及机械接头的自由度。接下来的部分描述了建立机构闭合方程的最通用方法。特定的方法可以用于特定的机构,例如文献[15]。在该方法的实现上下文中执行的测试基于文献[15]的方程,该方程可以轻松地适应4r和5r机构。
[0129]
机构的拓扑
[0130]
形式上,机构q可以由元组q=(h,b,q,j,d,c)定义。集合h={h1,h2,
…
}是有限集。集合h的元素称为链接。在实践中,链接可以解释为轴系统,并且目标是定义链接之间的相对位置。集合b={b1,b2,
…
}也是有限集。集合b的元素称为主体。映射q:h
→
b以这样的方式将每个链接与主体相关联,以使主体可以拥有若干个链接,但是每个链接都与唯一的主体相关联。表示法q(h)=b表示链接h与主体b相关联。表示法q
‑1(b)是与主体b相关联的一组链接。对于每个主体b,一个特定的链接被称为参考链接,并标记为h0(b)。在下文中,参考链接用于定位同一实体的其他链接。现在,接头的集合j是属于不同实体的链接对的子集,即用于定位同一实体的其他链接。现在,接头的集合j是属于不同实体的链接对的子集,即每个接头捕获不同实体的两个链接之间的逻辑连接。在此步骤中,可以通过g=(b,j,s,e)定义图g,其中s:j
→
b和e:j
→
b,其中s(h
i
,h
k
)=q(h
i
)且e(h
i
,h
k
)=q(h
k
)。图的节点是实体,图的弧是连接实体(的链接)的接头。在此步骤中,已完全定义了该机构的拓扑。
[0131]
尺寸参数
[0132]
现在,通过映射d和c定义几何形状。目标是将相对位置与链接对相关联,以便定义相应主体的尺寸(通过映射d)以及接头的自由度(通过映射c)。通过考虑主体内链接对的集合来确定每个主体的尺寸:
[0133]
[0134]
该组三维刚性运动记为se(3),映射d:i
→
se(3)使得对于每个主体b和主体b的每个非参考链接h,d(h0(b),h)∈se(3)是链接h相对于参考链接h0(b)的相对位置。通过角度和距离对每个相对位置进行参数化,并且通过这些相对位置的所有参数来定义机构的尺寸参数的集合u。
[0135]
位置参数
[0136]
通过使用映射c:j
→
se(3)来定义主体的相对位置,其中义主体的相对位置,其中将刚体运动d(h
i
,h
k
)关联到每个接头(h
i
,h
k
)。每个刚性运动的参数定义每个接头的自由度,并且机构的位置参数的集合p由这些相对位置的所有参数定义。为了清楚起见,分别将d(h
i
,h
k
)和c(h
i
,h
k
)记为d
i,k
和c
i,k
。
[0137]
示例
[0138]
例如,图12中的机构的拓扑结构由五个主体、十二个链接和六个接头定义,即:
[0139]
b={b1,b2,
…
,b5}
[0140]
h={h1,h2,
…
,h
12
}
[0141]
主体和链接所有权是通过映射q:h
→
b:来定义的:
[0142]
q(h1)=q(h2)=q(h3)=b1[0143]
q(h4)=q(h5)=b2[0144]
q(h6)=q(h7)=q(h8)=b3[0145]
q(h9)=q(h
10
)=b4[0146]
q(h
11
)=q(h
12
)=b5[0147]
参考链接如下:
[0148]
h0(b1)=h1[0149]
h0(b2)=h4[0150]
h0(b3)=h6[0151]
h0(b4)=h9[0152]
h0(b5)=h
11
[0153]
接头是:
[0154]
j={(h1,h4),(h5,h6),(h7,h
11
),(h8,h9),(h2,h
12
),(h3,h
10
)}
[0155]
图13示出了拓扑。轴系统与每个参考链接相关联。虚线示出接头。
[0156]
相对位置以这样的方式标注:尺寸和位置参数显式地出现在自变量中。这有助于阐明闭合方程。由于该示例是平面机构,因此使用了二维刚性运动的集合se(2)。这种刚性运动可以用经典形式写成其中θ是旋转角度,并且是平移向量。主体b1的尺寸由链接h2相对于参考链接h1的相对位置(即平移
)并且由链接h3相对于参考链接h1的相对位置(即平移)定义。主体b2的尺寸由链接h4相对于参考链接h3的相对位置(即平移)定义。主体b3的尺寸由链接h7相对于参考链接h6的相对位置(即平移)和由链接h8相对于参考链接h7的相对位置(即平移)定义。主体b4的尺寸由链接h
10
相对于参考链接h9的相对位置(即平移)定义。主体b5的尺寸由链接h
12
相对于参考链接h
11
的相对位置(即平移)定义。
[0157]
在此示例中,每个接头具有一dof旋转,因此所有刚体运动c
i,k
都是旋转:都是旋转:都是旋转:且
[0158]
这在图14中示出。
[0159]
所有事物为闭合方程准备就绪。通过组合相对位置以闭合机构的两个环来编写闭合方程,如图15所示。
[0160]
根据最左边的环建立第一个方程,根据最右边的环建立第二个方程。
[0161]
c
1,4
(θ1)d
4,5
(l2)c
5,6
(θ2)d
6,7
(l3)c
7,11
(θ3)d
11,12
(l5)c
2,12
(θ5)
‑1d
1,2
(l1)
‑1=ic
2,12
(θ5)d
11,12
(l5)
‑1c
7,11
(θ3)
‑1d
6,7
(l3)
‑1d
6,8
(l3)c
8,9
(θ4)d
9,10
(l4)c
3,10
(θ6)
‑1d
1,3
(l1)
‑1d
1,2
(l1)=i
[0162]
这导致六个独立的标量方程:
[0163]
cos(θ1+θ2+θ3‑
θ5)
‑
1=0
[0164]
[0165][0166]
cos(θ3‑
θ4‑
θ5+θ6)
‑
1=0
[0167]
l
3 cos(θ3‑
θ5)+2l4cos(θ3‑
θ4‑
θ5)
‑
2l
5 cosθ5‑
l
1 cos(θ3‑
θ4‑
θ5+θ6)=0
[0168]
l
3 sin(θ3‑
θ5)+2l4sin(θ3‑
θ4‑
θ5)+2l
5 sinθ5‑
l
1 sin(θ3‑
θ4‑
θ5+θ6)=0
[0169]
清楚地,整体尺寸参数为u=(l1,
…
,l5),并且位置参数为p=(θ1,
…
,θ6)。
[0170]
另一个示例是nr机构中涉及的典型杆的尺寸确定。它由两个链接h1和h2组成,如图16所示。
[0171]
以h1作为参考链接,h2相对于h1的相对位置是刚性运动d
1,2
(α,l),其组合了角度为α的旋转和沿旋转轴的长度为l的平移:
[0172][0173]
数学预备:投影到子集上
[0174]
本节概述了由该方法的实现操作的数学概念。令为给定点。令m是由隐式方程定义的的子集,其中是平滑且可能非线性的映射,其中m<n。目标是计算尽可能接近x0的点x
*
∈m。
[0175]
最小化
[0176]
经典地,该问题被公式化为在非线性约束下的二次最小化问题,即:
[0177][0178]
尽管现有许多数值算法都可以解决此问题,但是该方法的实现还是建立了专用方法,这是因为实验表明标准方法在移动性计算的环境中效率不高。第一步是将寻根问题公式化。
[0179]
寻根
[0180]
如可以看出的,此实现中使用的特定目标函数是可微的(可以使用以相同特性为特征的其他目标函数)。这允许该方法执行最小化,使得其包括找到拉格朗日映射导数的零。拉格朗日映射导数基于将约束插入具有拉格朗日乘数的目标函数。这种方法允许高效的最小化。
[0181]
通过引入拉格朗日乘数和拉格朗日映射:
[0182][0183]
众所周知,最小化问题的解一定是拉格朗日映射导数的零,即:
[0184]
l
x
(x,λ)=0
[0185]
l
λ
(x,λ)=0
[0186]
其将寻找映射的零,也称为寻根问题。
[0187]
此外,可以证明,如果使得线性映射不为满秩,则线性映射是不可逆的。这使根计算成为问题,这是导致奇异性的原因,下面将对此进行详细介绍。
[0188]
微分方程
[0189]
如可以看出的,此实现中使用的特定目标函数实际上是两次可微的(可以使用以相同特性为特征的其他目标函数)。这允许该方法以这样的方式执行查找,使得其简单地包括从与输入状态相对应的点开始积分微分方程(删除与可选目标尺寸值相对应的参数值)。该微分方程对应于向量场,并最终表示向二阶移动性的移动性。向量场的每个稳定平衡点都是拉格朗日映射导数的零,积分朝着验证约束的目标函数的最小值收敛。
[0190]
这里再次地,实验表明,解决寻根问题的现有数值算法在移动性计算的上下文中效率不高。为了可读性,用单个符号y表示寻根问题的未知量(x,λ),因为将原始的未知量x与未知的拉格朗日乘数λ分开是没有用的。此外,寻根问题记为f(y)=0。众所周知,如果y
*
是向量场的稳定平衡点,则它是寻根问题的解,意味着f(y
*
)=0。因此,考虑常微分方程,
[0191]
y
′
(t)=
‑
f
′
(y(t))
‑1f(y(t))
[0192]
y(0)=y0[0193]
这意味着,在给定适当的初始化点y0的情况下,轨迹使得当t
→
+∞时,y(0)=y0且y(t)
→
y
*
。该公式称为“连续牛顿法”。
[0194]
但是,可以调整这种策略,因为在移动性计算的上下文中,在y=y
*
处不存在逆f
′
(y)
‑1,如下所述。一种解是用转置线性映射f
′
(y)
t
来代替倒置线性映射f
′
(y)
‑1,这意味着感兴趣的微分方程为:
[0195]
y
′
(t)=
‑
f
′
(y(t))
t
f(y(t))
[0196]
y(0)=y0[0197]
再次证明,如果f(y
*
)=0,则y
*
也是向量场的稳定平衡点。这意味着在适当的初始化y0下,轨迹使得当t
→
+∞时,y(0)=y0且y(t)
→
y
*
。
[0198]
技术原因如下。向量场记为g(y)=
‑
f
′
(y)
t
f(y),当线性映射g
′
(y
*
)的特征值为负时,y
*
是向量场g(
·
)的稳定平衡。由于g
′
(y)=
‑
f
″
(y)
t
f(y)
‑
f
′
(y)
t
f
′
(y),因此g
′
(y
*
)=
‑
f
′
(y
*
)
t
f
′
(y
*
),其以形状
‑
a
t
a为特征,其中a=f
′
(y
*
)。矩阵
‑
a
t
a的任何特征值μ为负,因为与μ相关的归一化特征向量记为v(根据定义
‑
a
t
av=μv),则
‑
<a
t
av,v>=μ‖v‖2且
‑
<av,av>=μ,表示μ=
‑
‖av‖2≤0。
[0199]
图17示出了轨迹从初始点y0到解y
*
所遵循的路径,解y
*
是m的最接近y0的点。
[0200]
返回拉格朗日表示法,且微分方程为:
[0201]
[0202]
x(0)=x0[0203]
λ(0)=0
[0204]
并且,期望地,轨迹使得x(t)
→
x
*
且λ(t)
→
λ
*
,其中l
x
(x
*
,λ
*
)=0,l
y
(x
*
,λ
*
)=0且:
[0205][0206]
更简单的表示法不会详细说明偏导数:
[0207]
且:
[0208][0209]
x(0)=x0[0210]
λ(0)=0
[0211]
λ(0)=0仅是高效的示例(其已被测试),因为拉格朗日乘数的其他值可用于起点。
[0212]
在实践中,可以以组装或近似组装的输入状态提供输入机构(例如,用户已经近似组装了该机构,使得其在拓扑上看起来像最终的预期设计)。这可以定义集成的适当起点(对于x0部分)。在该方法中输入参数值不包含每个参数的相应输入值的情况下,则可以通过任何方式初始化这些参数以进行整合,例如通过应用将机构进行组装或近似组装(但不使其可移动)的试探法(heuristic)。
[0213]
求解
[0214]
求解是在时间间隔[0,t
max
]上对微分方程y
′
=
‑
f
′
(y)
t
f(y)的数值积分,其中t
max
增大直到‖f(y(t
max
))‖小于预定义的阈值ε>0。微分方程的值是,求解遵循由初始条件y0定义的向量字段中的唯一路径。没有像传统数值方法可能发生的迭代算法、步长管理、局部最小陷阱等。
[0215]
初始化点y0可以在稳定平衡点的吸引盆(basin of attraction)中。可能存在点使得这意味着是平衡点,但是这意味着不是寻根问题的解。后者是由换位代替逆(inversion)而引起的。在实践中,测试表明该方法可以很好地应对这些问题。
[0216]
真正移动性vs无穷小流动性
[0217]
现在讨论确保移动性的第二约束。
[0218]
在该方法的这种实施方式中,它简单地是表示在输出状态下机构的二阶移动性的等式约束。已经识别,该约束实际上足以确保该机构的移动性。这允许优化的可实践性。
[0219]
如文献[4]所述,为了应对生成或保存过度约束机构的移动性的内在困难,文献[6]提出了无穷小移动性的概念。原理是考虑映射其中是位置参数空间中的曲线。根据定义,如果存在弧使得并且使得所有连续导数对于i=0,1,
…
,n在t=0处消失,则解(u,p)以n阶无穷小移动性为特征,
[0220][0221]
在文献[6]中证明了,所有阶数处的无穷小移动性等同于真正移动性。无穷小移动性是一个微妙的概念。例如,图18是刚性的平面组装件。图19示出了平面机构的真正可移动版本(由于移动性条件)。
[0222]
图20和图21分别示出了该组装件的两个版本,它们以一阶是可移动的,而不是以二阶是可移动的。因此,它们并不是真正可移动的,因此它们是刚性的。在此示例中,一阶移动性是由相对的平行杆引起的。
[0223]
在调查和测试过程中,发明人发现了4r空间组装件的一个版本,该版本以二阶可移动,但不是真正可移动的。
[0224]
二阶移动性定义
[0225]
在文献[7]中证明了,能够到达足够大量不同位置的组装件是真正可移动的。该方法的实现基于私人实验,该实验表明,在提议的优化的上下文中,二阶移动性几乎总是提供真正的移动性。为了更好地调节方程,方便的是(但不限于)假设使用曲线横坐标对曲线进行参数化,即对于所有t,使用微积分的基本规则,对于所有t:
[0226][0227]
并且
[0228][0229]
此外,
[0230][0231]
这产生了二阶移动性方程:如果存在(u,p)∈u
×
p,v∈p和w∈p使得(并且这可以定义等式约束,即提议的优化程序的第二约束):
[0232]
f(u,p)=0
[0233]
f
p
(u,p)v=0
[0234]
f
p
(u,p)vv+f
pp
(u,p)w=0
[0235]
‖v‖2‑
1=0
[0236]
<v,w>=0
[0237]
然后,由尺寸参数u定义的机构可以是二阶可移动的。实际上,通过选择
不难校验且因为从设计上讲,且
[0238]
该方法的实施方式利用了二阶移动性,因为实践中它是足够的,并且允许相对快速的最小化,但是其可以容易地将其扩展到任何更高阶的移动性。
[0239]
避免刚性接头
[0240]
约束可以包括代表刚性接头缺失的第三约束。
[0241]
如果在移动机构运动期间,通过该接头连接的两个实体没有以任何相对运动为特征,则该接头是刚性的。换句话说,通过刚性接头连接的两个实体可以视为单个刚体。从设计人员的角度来看,即使在其他地方确实存在一些移动性,也应避免这种行为。在运动期间,每个接头都应该处于活动状态。现在的目标是建立避免刚性接头的方程。移动性以条件‖v‖2=1诞生,其中v是假设轨迹的切向量。这种情况不能避免刚性接头,因为向量v的一些(但不是全部)坐标可能会消失,尽管‖v‖不会消失。将向量v的坐标记为v=(v1,
…
,v
n
),并引入新的标量未知量β,消除刚性接头的附加条件是:
[0242][0243]
避免尺寸消失
[0244]
另外,约束可以包括代表消失的尺寸缺失的第四约束。
[0245]
通过该方法的实现计算出的输出机构应该不会以具有尺寸消失的退化实体为特征。将尺寸参数u的坐标记为u=(u1,
…
,u
m
),先前的非刚性接头条件被重新使用以嵌入非消失的尺寸:
[0246][0247]
因此,可以在与第三约束相同的约束内捕获第四约束,从而进一步表示在输出状态下机构的非退化。换句话说,第三约束和第四约束被提供为公共(例如,等式)约束。可替代地,可以在优化程序中将第四约束作为与第三约束分开的约束来提供。
[0248]
非退化二阶移动性模型
[0249]
为了清楚起见,单个映射m(u,p,v,w,β)捕获二阶移动性、非刚性接头和非消失的尺寸条件
[0250][0251]
这样,将非退化的二阶移动性写为m(u,p,v,w,β)=0。给定由尺寸参数u0和位置参数p0定义的输入机构,问题是找到尽可能接近u0的尺寸参数u,并找到参数p、v、w和β,使得:
[0252][0253]
如前所述,求解是与最小化问题相关联的微分方程的数值积分。拉格朗日映射为:
[0254][0255]
由于数学,定义了以二阶移动性为特征的非退化机构的方程系统为:
[0256]
l
′
(u,p,v,w,β,λ)=0
[0257]
根据定义,n+1阶移动性包括n阶移动性方程的导数。考虑以二阶可移动的机构。如果此机构是真正可移动的,则它在所有阶上都是无穷小地可移动的,并且尤其是在三阶上是可移动的。这使二阶移动性方程处于不良状态,因为它们的导数也消失了,从而在最小化问题的约束条件中产生了不一致。结果是,当该机构真正可移动时,拉格朗日二阶导数是不可逆的。
[0258]
对众多过度约束机构进行的测试证实了线性映射l
″
(u,p,v,w,β,λ)不可逆的事实。因此,可以做一些事来用某些更合适的事务来代替逆。现有技术提供了三种用于处理不可逆矩阵a的方法。首先,当行数大于列数时,矩阵a的所谓伪逆由(a
t
a)
‑1a
t
定义。其次,当行数小于列数时,矩阵a的所谓伪逆是a
t
(aa
t
)
‑1。第三,用于处理不可逆矩阵的最通用方法是奇异值分解(svd)方法,它是纯数值方法。现在解释为什么这些方法都不适于实现该方法的需要的原因。两种伪逆方法都需要基本的非简并性条件,即:a
t
a或aa
t
应该是可逆的。在该方法的实现的上下文中,这种非简并性条件是无法达到的。此外,与伪逆的符号定义相反,svd是纯粹的数值和耗时方法。它不能用于微分方程的定义。由于以下原因,该方法的实现利用了转置。它不需要任何非简并性条件,因为转置矩阵始终存在。计算时间非常短。正如数学介绍中所解释的那样,方程l
′
=0的任何解也是向量场
‑
(l
″
)
t
l
′
的稳定平衡点。
[0259]
因此,逆l
″
(u,p,v,w,β,λ)
‑1有利地被转置l
″
(u,p,v,w,β,λ)
t
替代,使得微分方程为:
[0260][0261]
u(0)=u0[0262]
p(0)=p0[0263]
v(0)=v0[0264]
w(0)=w0[0265]
β(0)=β0[0266]
λ(0)=λ0[0267]
设置初始条件
[0268]
设置初始条件u0、p0、v0、w0、β0、λ0确定向量场中轨迹的路径。参数u0和p0由输入机构给出,并且可以对应于机构的组装或基本组装状态。数值测试表明,w0=0和λ0=0是有效的。初始v0以这样的方式被计算,使得‖v0‖2=1,并且‖f
p
(u0,p0)v0‖2是最小值。该选择由目标驱动,目标尤其是找到u、p、v,使得f
p
(u,p)v=0且‖v‖2=1。另外,如果偶然地输入机构以一阶移动性为特征,则存在归一化的v0,使得f
p
(u0,p0)v0=0,并且初始化过程自然地计算出该特定v0。给定行比列多的矩阵a,根据优化理论众所周知,最小化‖ax‖2的归一化向量x是与其最小特征值相关联的矩阵a
t
a的归一化特征向量,即最小数μ,使得a
t
ax=μx。因此,v0是与其最小特征值相关联的矩阵f
p
(u0,p0)
t
f
p
(u0,p0)的特征向量。最后,计算β0,使得:
[0269][0270]
设置目标尺寸值
[0271]
如前所述,在一些情况下,用户可以设置目标尺寸值。本部分的目的是解释这是如何实现的。通过向量变量u捕获机构的尺寸,向量变量u实际上是标量变量u=(u1,u2,
…
,u
n
)的列表,其中每个u
i
是长度或角度。设置目标尺寸值将:
[0272]
1.选择特定的标量参数u
k
,其中k∈{1,
…
,n},
[0273]
2.为标量参数u
k
设置特定的数值,
[0274]
3.从未知向量u删除此参数,使其变为
[0275]
步骤1和2由用户完成。步骤3由系统完成。因此,当设置了目标尺寸值时,该方法的实现处理缩减的未知向量u,该向量以少一个未知量为特征。这不会改变总体过程,并且这就是为什么(出于可读性)未在较早的注释中将其记录下来。
[0276]
现在参考图22
‑
29讨论该方法的实现的示例。测试了这些示例,并在此提供了结果。
[0277]
示例1:将刚性4r组装件更改为非退化4r移动机构
[0278]
该测试用例是对该方法的验证,因为4r机构的理论移动性条件是已知的。从初始4r刚性组装件u0开始,该方法的实现已计算出4r移动机构u1,如下所示:
[0279][0280]
这些输入状态和输出状态分别在图22
‑
23中示出。
[0281]
二阶移动性的量级为m(
…
)≈10
‑9,并且移动性条件的量级为10
‑8。通过使用catia组装件设计求解器,可以确认所得到的机构的移动性。
[0282]
示例2:将刚性5r组装件更改为非退化5r移动机构
[0283]
从初始5r刚性组装件u0开始,该方法的实现已计算出5r移动机构u1,如下所示:
[0284][0285]
这些输入状态和输出状态分别在图24
‑
25中进行了示出(左图表示)。
[0286]
二阶移动性的量级为m(
…
)≈10
‑
16
,并且移动性条件的量级为10
‑
16
。通过使用catia组装件设计求解器,可以确认所得到的机构的移动性。
[0287]
示例3:将刚性6r组装件更改为非退化6r移动机构
[0288]
该测试用例是在移动性条件未知的同时创建真正的移动6r。从最初的6r刚性组装件u0开始,该方法的实现已计算出6r移动机构u1,如下所述:
[0289][0290]
这些输入状态和输出状态分别在图26
‑
27中示出。
[0291]
二阶移动性的量级为m(
…
)≈10
‑
16
。通过使用catia组装件设计求解器,可以确认所得到的机构的移动性。
[0292]
示例4:将刚性4r1c组装件更改为非退化移动机构
[0293]
此示例以四个旋转接头(4r)和一个圆柱形接头(1c)为特征。该测试用例是在移动性条件未知的同时创建真正的移动4r1c。从初始的4r1c刚性组装件u0开始,该方法的实现已计算出4r1c移动机构u1。
[0294][0295]
这些输入状态和输出状态分别在图28
‑
29中示出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1