一种多旋翼无人机桨叶优化设计方法
1.本发明涉及一种桨叶设计方法,尤其涉及一种多旋翼无人机桨叶优化设计方法,属于无人机领域。
背景技术:
2.传统的桨叶设计大多是根据以往的经验数据,通过确定最大输出拉力与输入功率的关系,先初步选择桨叶的数目、直径和平均弦长等几何参数,在选择桨叶厚度的径向分布方式以及合适的翼型。
3.然而,这种单线设计的方式需要不断设计螺旋桨几何参数和计算:根据初步确定的桨叶几何参数,利用片条理论的知识计算评估螺旋桨在各种工况下的性能,如果计算结果不能满足设计目标,需要重新选择几何参数和建模计算,直到性能满足设计要求。由于此种设计方式反复验证环节多,导致桨叶设计效率低、任务量大。
4.此外,目前的桨叶优化设计研究大多只针对某一参数或某一工况进行优化设计以提高桨叶气动性能,通用性差,设计维度低,不具备普遍适用性,难以适应多样的需求。
5.由于上述原因,本发明人提出了一种多旋翼无人机桨叶通用的优化设计方法。
技术实现要素:
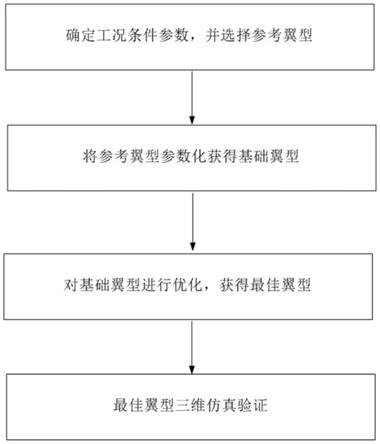
6.为了克服上述问题,本发明人进行了锐意研究,设计出一种多旋翼无人机桨叶优化设计方法,包括以下步骤:
7.s1、确定工况条件参数,并选择参考翼型;
8.s2、将参考翼型参数化获得基础翼型;
9.s3、对基础翼型进行优化,获得最佳翼型;
10.s4、最佳翼型三维仿真验证。
11.在步骤s1中,所述工况条件参数包括桨叶转速n(rpm)及该转速下拉力、来流速度v和来流角度α;
12.所述选择参考翼型为从翼型库中选择一种满足工况使用条件或接近工况使用条件的翼型。
13.在步骤s2中,通过parsec法将基础翼型参数化,采用多项式的加权线性组合拟合来描述翼型的上表面和下表面,获得基础翼型。
14.在步骤s3中,通过遗传算法对基础翼型进行优化,包括以下子步骤:
15.s31、编码与群体初始化;
16.s32、选择运算、交叉运算与变异运算;
17.s33、个体适应度检测评估,获得理想翼型。
18.s34、对理想翼型进行优化,获得最佳翼型。
19.进一步地,在步骤s31中,所述编码是指将获得的基础翼型的曲线表达进行编码,所述群体初始化包括设置种群规模、变量字符串长度、进化代数、交叉概率和变异概率,优
选地,种群规模为10~200,变量字符串长度为11,进化代数为100~200;
20.优选地,优化目标函数为翼型升阻比y:
[0021][0022]
其中α为翼型攻角,t为翼型拉力,d为翼型阻力,c
l
为翼型升力系数,c
d
为翼型阻力系数。6、根据权利要求4所述的多旋翼无人机桨叶优化设计方法,其特征在于,
[0023]
在步骤s32中,将选择运算、交叉运算与变异运算应用于群体,得到下一代群体。
[0024]
其中,所述选择运算的选择算子为最佳保留选择:
[0025]
所述交叉运算的算子或交叉概率为0.5~0.9;
[0026]
所述变异运算的算子变异概率为0.1~0.3;
[0027]
在一个优选的实施方式中,在步骤s33中,将适应度函数设定为:
[0028][0029]
其中,y为翼型升阻比,y0为原翼型升阻比。
[0030]
进一步地,在步骤s34中,再次利用遗传算法对理想翼型的弦长进行变异生成新的翼型库,遗传算法的变量为翼型的弦长c,对翼型的气动数据进行编码。
[0031]
根据本发明,所述气动数据通过对叶素沿翼型展长进行积分获得。
[0032]
在一个优选的实施方式中,遗传算法中优化以桨叶力效作为优化目标函数,桨叶力效可以表示为:
[0033][0034]
其中η为桨叶力效,ω为桨叶转速。
[0035]
本发明所具有的有益效果包括:
[0036]
(1)将不同工况下桨叶的工作参数作为输入,可针对不同工况条件优化设计桨叶,相较传统桨叶设计方法适用性更广;
[0037]
(2)通过两次优化,分别生成一次优化翼型库和二次优化翼型库,优化维度更高;
[0038]
(3)采用遗传算法和叶素动量法对翼型进行异变优化,优化效率高,优化后翼型效果好。
附图说明
[0039]
图1示出根据本发明一种优选实施方式的多旋翼无人机桨叶优化设计方法流程示意图;
[0040]
图2示出根据本发明一种优选实施方式的parsec参数在翼型中的体现;
[0041]
图3示出根据本发明一种优选实施方式的多旋翼无人机桨叶优化设计方法遗传算法示意图;
[0042]
图4示出根据本发明实施例1中parsec拟合的翼型结果与原naca6412翼型对比图;
[0043]
图5示出根据本发明实施例1中parsec拟合翼型与原naca6412翼型误差;
[0044]
图6示出根据本发明实施例1中理想翼型结果;
[0045]
图7示出根据本发明实施例1中理想翼型结果;
[0046]
图8示出根据本发明实施例1桨叶悬停状态下气动仿真结果;
[0047]
图9示出根据本发明实施例1最佳翼型加工生产实物图;
[0048]
图10示出根据本发明实施例1最佳翼型叶与参考桨风洞试验气动性能对比结果。
具体实施方式
[0049]
下面通过附图和实施例对本发明进一步详细说明。通过这些说明,本发明的特点和优点将变得更为清楚明确。
[0050]
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
[0051]
根据本发明提供的一种多旋翼无人机桨叶优化设计方法,如图1所示,包括以下步骤:
[0052]
s1、确定工况条件参数,并选择参考翼型;
[0053]
s2、将参考翼型参数化获得基础翼型;
[0054]
s3、对基础翼型进行优化,获得最佳翼型;
[0055]
s4、最佳翼型三维仿真验证。
[0056]
在步骤s1中,所述工况条件参数为待设计的桨叶在与其动作有直接关系的条件下的工作状态参数,包括桨叶转速n(rpm)及该转速下拉力、来流速度v和来流角度α。
[0057]
所述选择参考翼型为从已设计出的翼型中选择一种满足工况使用条件或接近工况使用条件的翼型,优选从翼型库中选择,例如profili翼型数据库、naca翼型数据库等。
[0058]
在本发明中,参考翼型的选择方式不做特别限定,本领域技术人员可根据经验或实际使用需求进行选择。
[0059]
翼型作为桨叶的截面形状,其几何外形对整个桨叶部件甚至是整个飞行器的性能均存在重要影响,基础翼型直接应用于无人机上难以获得较高的性能目标,因此,需要对其进行优化,在本发明中,通过将参考翼型参数化,对参数进行优化拟合实现对参考翼型的优化。
[0060]
在步骤s2中,所述将参考翼型参数化是通过parsec法实现的,parsec法是一种典型的翼型参数化方法,其具备确定个数的参数,广泛应用于桨叶的参数化中。
[0061]
通过parsec法将基础翼型通过下述参数描述,包括翼型前缘半径r
le
、翼型吸力面最大高度x
up
、翼型吸力面最大高度位置z
up
、翼型吸力面曲率z_xx
up
、翼型压力面最大高度x
lo
、翼型压力面最大高度位置z
lo
、翼型压力面曲率z_xx
lo
、翼型上尾缘横坐标x
te,up
,翼型下尾缘横坐标x
te,lo
,翼型尾缘厚度dz_te、翼型尾缘位置z_te、翼型上尾缘角α_te、翼型下尾缘角β_te,如图2所示。
[0062]
进一步地,在本发明中,采用拟合的方式,优选采用多项式的加权线性组合来描述翼型的上表面和下表面,如式一所示,从而获得基础翼型:
[0063][0064]
其中,y
u
、y
l
分别为翼型上、下表面的纵坐标,x为翼型沿弦向的横坐标即控制点,可根据需要在翼型上选取,理论上来说控制点越多,拟合精度越高。
[0065]
a
n
、b
n
为多项式系数,上表面通过下式进行求解:
[0066][0067]
通过式二可求得parsec参数方程的多项式系数,即对控制点的约束条件,代入式一即可求得上表面翼型各点坐标。
[0068]
同样,下表面通过下式进行求解:
[0069][0070]
通过式三可求得parsec参数方程的多项式系数,代入式一即可求得下表面翼型各点坐标。
[0071]
完成拟合之后,以控制点对应的原翼型纵坐标与拟合纵坐标结果的平方差作为拟合结果评价指标,若二者均方差小于2
×
10
‑3,则认为拟合良好,若二者均方差大于2
×
10
‑3,则重新进行拟合。
[0072]
在步骤s3中,通过遗传算法对基础翼型进行优化。
[0073]
所述遗传算法指的是模拟达尔文自然选择以及遗传机制的计算模型,主要思想来源于生物遗传学以及适者生存的自然规律,属于具备生存和检测的随机搜索算法。
[0074]
进一步地,在步骤s3中包括以下子步骤:
[0075]
s31、编码与群体初始化;
[0076]
s32、选择运算、交叉运算与变异运算;
[0077]
s33、个体适应度检测评估,获得理想翼型。
[0078]
s34、对理想翼型进行优化,获得最佳翼型。
[0079]
在步骤s31中,所述编码是指将获得的基础翼型的曲线表达进行编码,由于遗传算法不能直接处理问题空间的参数,因此必须通过编码将要求解的问题表示成遗传空间的染色体或者个体,也就是说,编码过程为将表现型(基础翼型的曲线表达)映射到基因型。在步骤s31中,所述编码的方法与常规的编码方法相同,故不再赘述。
[0080]
在遗传算法中,为保证初值的无约束性,初始群体中的个体是完全随机产生的,在产生之前,需要对群体进行初始化,所述初始化包括设置种群规模、变量字符串长度、进化代数、交叉概率和变异概率。
[0081]
种群规模是指任意一代中的个体总数,是人为设定的,种群规模越大越可能找到全局解,但运行时间也相对较长,在本发明中从10
‑
200之间取值;
[0082]
变量字符串长度需根据具体案例进行设置,在本发明中,所述变量字符串长度优选为11,与parsec参数相对应。
[0083]
进化代数需根据实际收敛情况确定,通常来说进化代数越大计算结果收敛越稳定,但相应的计算时间也会增加,在本发明中为100~200。
[0084]
优化目标函数为翼型升阻比y:
[0085][0086]
其中α为翼型攻角,本领域技术人员根据桨叶具体工作条件根据经验自由选择;t为翼型拉力,d为翼型阻力,c
l
为翼型升力系数,c
d
为翼型阻力系数,c
l
、c
d
可通过空气动力学仿真软件,如fluent计算获得。
[0087]
在步骤s32中,将选择运算、交叉运算与变异运算应用于群体,得到下一代群体。
[0088]
其中,所述选择运算的选择算子为最佳保留选择,最佳保留选择为选择算子中常用的一种选择策略,又称为锦标赛选择算法,即选择每一代群体中适应度最高的个体结构完全复制到下一代群体,能保证遗传算法终止时得到的最后结果是历代出现过的最高适应性的个体。
[0089]
交叉运算的交叉概率是用于判定两个个体是否进行交叉操作,在本发明中,将交叉概率设置为0.5~0.9,从而保证交叉形成新个体的效率。
[0090]
变异运算的变异概率设置为0.1~0.3,既允许少数个体存在变异情况,以避免陷入局部最优解,又保证了运算收敛。
[0091]
在步骤s33中,对下一代群体进行个体适应度检测评估,即适应度较高的个体遗传到下一代的概率较大,而个体适应度需要根据设计的适应度函数确定。
[0092]
在遗传算法中,适应度函数的设计要结合求解问题本身的要求而定,在本发明中,将适应度函数设定为:
[0093][0094]
其中,y为翼型升阻比,y0为原翼型升阻比,在此适应度函数中,s的值越小,证明该翼型的升阻比越大。提高翼型升阻比为本设计方法的优化目标,故将此函数作为适应度函
数,选择较为直观,即选择过程与优化目标保持了良好的一致性。
[0095]
在对某翼型适应度进行评估时,若s不满足数值约束条件,则舍弃该翼型;若满足,则在该代中保留,并作为该代选择的样本。
[0096]
当某代个体全部不满足评估条件时,重复步骤s32,再次进行一次选择运算、交叉运算与变异运算,即群体再进行一次进化,直至达到评估条件。
[0097]
当群体满足评估条件后,将群体输出,即可获得一次优化翼型库。
[0098]
进一步地,对一次优化翼型库中的各翼型进行仿真,筛选出其中最优的翼型作为理想翼型。
[0099]
优选地,所述最优的翼型是以翼型升阻比为考量参数确定的,选择升阻作最大的翼型作为最优翼型。
[0100]
在一个优选的实施方式中,采用ansys平台下的icem和fluent进行仿真。
[0101]
在步骤s34中,结合叶素动量法对理想翼型的各截面安装角和弦长进行设计。
[0102]
所述叶素动量法即当气流流经翼型时,上、下翼面上的气流速度不同,上翼面流速高,气流静压下降;下翼面流速低,气流静压上升。
[0103]
具体地,利用叶素动量法的微分形式分析作用在叶片沿翼展方向长度为dr的叶素上的空气动力df:
[0104][0105]
其中,da为叶素最大投影面积,ω为相对叶素的风速,ρ为空气密度,c为翼型弦长,c
r
为翼型总空气动力系数,dr为叶素的长度。
[0106]
利用叶素动量法的积分形式,通过对叶素沿翼型展长进行积分得到桨叶的气动数据:
[0107][0108]
其中,t为翼型升力,d为翼型阻力,m为翼型扭矩。c
l
为翼型升力系数,c
d
为翼型阻力系数,c
m
为翼型阻力系数,三者均可通过fluent仿真软件获得,r表示螺旋桨半径,例如17寸桨叶其螺旋桨半径为21.6cm。
[0109]
再次利用遗传算法对理想翼型的弦长进行变异生成新的翼型库,本次遗传算法的变量为翼型的弦长c,对翼型的气动数据进行编码,交叉概率为0.5~0.9,优选为0.7,变异概率为0.1~0.5,优选为0.3。
[0110]
本次遗传算法中以桨叶力效作为优化目标函数,力效即桨叶消耗1w电量能够提升的升力,桨叶力效越高证明其动力性能越好,其可以表示为:
[0111]
[0112]
其中η为桨叶力效,ω为桨叶转速。
[0113]
本次遗传算法中,将优化目标直接作为适应度函数,每一代中会将力效最高的目标作为下一代的初始个体进行交叉和变异,保持优化设计思路的一致性。
[0114]
在步骤s4中,通过软件对获得的最佳桨叶进行仿真,以验证其是否满足设计目标,若不满足设计目标,重复步骤s1~s3。
[0115]
优选的,通过ansys平台下的geometry、meshing以及fluent三款软件对最佳翼型进行仿真。
[0116]
实施例
[0117]
实施例1
[0118]
优化某多旋翼无人机桨叶,该无人机工作状态以悬停为主,其工况条件参数为:来流速度为10m/s,来流角度为0
°
,桨叶在转速为5500rpm下产生拉力不低于3.5kg。
[0119]
选择naca6412为基础翼型,通过parsec方法对naca6412翼型进行参数化,其结果如下表所示。
[0120]
表一
[0121][0122][0123]
采用多项式加权线性组合描述翼型的上表面和下表面,其结果如图4所示,从图上可以看出,获得的描述曲线与原naca6412翼型基本完全重叠,以各拟合点纵坐标与原翼型纵坐标协方差作为拟合误差评判指标,其拟合误差如图5所示,可以看出,拟合误差均控制在千分之一(一般情况下,拟合误差在千分之二以内认为拟合结果良好)以内,拟合效果良好。
[0124]
利用遗传算法和叶素动量法的数学仿真程序对翼型进行优化设计,其中设置种群规模为50,进化代数为100代,设置交叉概率为0.7,变异概率为0.3。优化目标函数为翼型升阻比y:
[0125][0126]
其中α为翼型攻角,在本例中,为使仿真计算覆盖桨叶全部可能工况,α取值范围设
置为[
‑
20
°
,20
°
],步长为1
°
。c
l
、c
d
为机体系下的升力系数、阻力系数,均由fluent仿真计算得出,t为翼型拉力,d为翼型阻力。
[0127]
适应度函数为:
[0128][0129]
通过遗传算法优化后以翼型升阻比为考量参数确定获得理想翼型,选用ansys平台下的icem软件对理想翼型进行计算域建立与网格划分,利用fluent软件对翼型进行空气动力学仿真,其结果如图6所示,生成翼型库中获得的最优翼型升阻比明显优于原naca6412翼型。翼型库中的最优翼型如图7所示。
[0130]
利用叶素动量理论对各截面安装角和弦长进行优化,获得最佳翼型,其中各截面安装角和弦长结果如下表所示:
[0131]
表二
[0132][0133]
[0134]
选用ansys平台下的geometry、meshing、fluent软件对桨叶进行仿真验证,其中,geometry软件对桨叶进行计算域建立,meshing软件对桨叶计算域进行网格划分,fluent软件对桨叶进行空气动力学仿真,在桨叶悬停状态下气动仿真结果如图8所示,由图可以看出,桨叶随产生拉力增加,力效降低,整体规律符合实际。
[0135]
将获得的最佳翼型加工生产实物,如图9所示,对其进行风洞试验测试桨叶性能,并将其与参考桨叶(17寸商品桨)风洞试验气动性能对比,结果如图10所示,在悬停状态下,单位拉力下优化设计桨叶的力效高于参考桨叶约13%。
[0136]
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”、“前”、“后”等指示的方位或位置关系为基于本发明工作状态下的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”、“第四”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0137]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”“相连”“连接”应作广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体的连接普通;可以是机械连接,也可以是电连接;可以是直接连接,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0138]
以上结合了优选的实施方式对本发明进行了说明,不过这些实施方式仅是范例性的,仅起到说明性的作用。在此基础上,可以对本发明进行多种替换和改进,这些均落入本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1