基于时空状态的交叉口通行时段的深度划分方法及系统
1.本发明属于交通时段划分、有序聚类、交通状态识别、交叉口信号配时及交通仿真等技术领域,特别是一种基于时空状态的交叉口通行时段的深度划分方法及系统。
背景技术:
2.在交通信号控制过程中,常用的方法包括,定时控制,自适应控制和实时控制。自适应控制和实时控制对数据的实时性有较高要求。目前在城市中覆盖雷达和实时检测器的路口并不多,因此这两种方案无法得到有效推行。定时控制是目前最常用也是最易于实施的信号控制方法,常用的定时控制方法分为固定配时和分时段定时控制(tod)两种。分时段定时控制可以更有效地考虑不同时段的交通状态,及时对配时方案进行调整,因此目前应用更为广泛。
3.交管部门在现有的时段划分方案中,更多的是根据信控工程师的经验,经验丰富的工程师可以较为准确地定位时段的关键位置,但是也无法做到对多路口的精确划分。在目前的时段自动划分方面的研究中,文献“data
–
driven methodology for signal timing plan development:a computational approach”使用k-means算法来进行时段划分,针对k-means算法需要事先输入分类个数的缺陷,文献“subtractive clustering-based k-means technique for determining optimum time-of-day breakpoints”引入减法聚类,利用synochro仿真获取最佳聚类数,但是k-means等聚类算法会产生较多离群点的情况,因此,文献“using k-means clustering to identify time-of-day break points for traffic signal timing plans”使用非层次聚类,并且针对离群点的问题,梳理了人工调整原则;此外,还有人工免疫算法如文献“基于人工免疫算法的交通时段自动划分方法”,njw算法以及改进的njw算法如文献“基于改进njw算法的交通控制时段划分”等。然而上述算法由于缺少对时间特性的考虑,因此在时间连续性和准确性上均有一定的不足,针对这一问题,有序聚类(如文献“基于动态时段划分的交叉口信号控制模型与算法研究”、“采用递归有序聚类的信号控制时段划分方法”等)被应用在时段划分方面并取得了一定的效果,但是由于流量数据在不同时段的波动性,该时段划分方法,会导致分段点集中在饱和度较低的时段内,导致时段划分微观上不够细致,得到的结果往往不够理想。且划分的结果仅是流量在时段的分段状态,无法识别该时段的交通状态。
技术实现要素:
4.本发明的目的在于针对上述现有技术存在的问题,提供一种基于时空状态的交叉口通行时段的深度划分方法及系统。
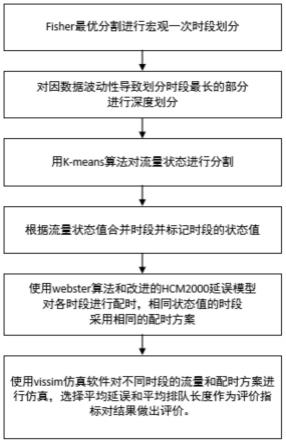
5.实现本发明目的的技术解决方案为:一种基于时空状态的交叉口通行时段的深度划分方法,所述方法包括以下步骤:
6.步骤1,将所需优化的路口的流量数据按该数据采集的时间顺序进行排列,构建时间序列与流量的关系曲线,之后对时段进行一次分段;
7.步骤2,选取一次分段结果中最长的时段,再进行二次深度分段;
8.步骤3,对流量数据进行一维分割,得到各流量状态的分段点,两分段点之间为一个状态区间,处于其中的流量为同一状态;
9.步骤4,根据步骤3的流量状态值对步骤1和步骤2分段后的时段进行合并;
10.步骤5,利用webster算法和改进的hcm2000延误模型对各时段进行配时,且对处于同一状态值的时段使用相同的配时方案。
11.进一步地,步骤1中对时段进行一次分段、步骤2中进行二次深度分段具体采用基于动态规划的fisher最优分割算法。
12.进一步地,步骤3对流量数据进行一维分割,具体采用k-means算法,获得k个流量的分段点。
13.进一步地,步骤4所述根据步骤3的流量状态值对步骤1和步骤2分段后的时段进行合并,具体过程包括:
14.步骤4-1,确定每个时段的流量状态:获取该时段所包含的状态区间,之后获取每个状态区间中流量数据点的数量,将流量数据点数量最多的状态区间所对应的状态作为该时段的流量状态;
15.步骤4-2,针对经步骤1和步骤2分段后的每个时段划分点,比较该划分点相邻两个时段的流量状态,若两个流量状态相同,则去除该时段划分点即将所述相邻两个时段合并。
16.进一步地,步骤5所述利用webster算法和改进的hcm2000延误模型对各时段进行配时,具体过程包括:
17.步骤5-1,计算最佳信号周期时长:
18.webster公式:
19.若k-means状态值小于等于饱和度划分点
20.hcm2000改进估算公式:
21.c=1.23l
·e(2.46-0.02l)y
,若k-means状态值大于饱和度划分点
22.其中,
23.l=nl+ar
[0024][0025]
式中,c为最佳信号周期时长,l为交叉口总损失时长,l为每个相位的损失时间;n为相位数量,y为第i个相位的关键流量比,y为所有相位的关键流量比之和,ar为全红时长;
[0026]
步骤5-2,根据最佳信号周期时长计算绿灯时长:
[0027][0028]
式中,gi为第i个相位的绿灯时长,g
min
为第i个相位的最短绿灯时长,qi为第i个相位临界车道流量,si为第i个相位的饱和流量。
[0029]
进一步地,所述方法还包括:
[0030]
步骤6,利用vissim仿真软件对不同时段的流量和配时方案进行仿真,选择平均延误和平均排队长度作为评价指标对仿真结果进行评价。
[0031]
一种基于时空状态的交叉口通行时段的深度划分系统,所述系统包括:
[0032]
第一时段划分模块,用于将所需优化的路口的流量数据按该数据采集的时间顺序进行排列,构建时间序列与流量的关系曲线,之后对时段进行一次分段;
[0033]
第二时段划分模块,用于选取一次分段结果中最长的时段,再进行二次深度分段;
[0034]
流量状态划分模块,用于对流量数据进行一维分割,得到各流量状态的分段点,两分段点之间为一个状态区间,处于其中的流量为同一状态;
[0035]
时段合并模块,用于根据流量状态值对第一时段划分模块和第二时段划分模块分段后的时段进行合并;
[0036]
配时模块,用于利用webster算法和改进的hcm2000延误模型对各时段进行配时,且对处于同一状态值的时段使用相同的配时方案。
[0037]
进一步地,所述系统还包括:
[0038]
评价模块,用于利用vissim仿真软件对不同时段的流量和配时方案进行仿真,选择平均延误和平均排队长度作为评价指标对仿真结果进行评价。
[0039]
本发明与现有技术相比,其显著优点为:1)解决了时段划分方面时段划分点大部分落在饱和度较低的时段附近,对饱和度较高的时段划分效果不好的问题;2)通过使用k-means算法对流量数据进行一维分割,可以得到流量状态分段点,可以得到每个时段对应的流量状态;并据此定义了饱和度的高低界限,对饱和度不同的时段,使用不同的延误模型来进行优化配时,效果更佳;3)根据k-means算法得到的流量状态点,对时段进行合并,有效解决了二次微观有序聚类造成的时段划分较多的问题。
[0040]
下面结合附图对本发明作进一步详细描述。
附图说明
[0041]
图1为本发明基于时空状态的交叉口通行时段的深度划分方法的流程图。
[0042]
图2为一个实施例中交叉口渠化图。
[0043]
图3为一个实施例中进行宏观有序聚类得到的结果图。
[0044]
图4为一个实施例中进行微观有序聚类得到的结果图。
[0045]
图5为一个实施例中进行k-means流量状态分割的结果图。
[0046]
图6为一个实施例中根据k-means状态值进行时段合并后的结果图。
[0047]
图7为一个实施例中时段划分的结果图。
[0048]
图8为一个实施例中路口渠化图的vissim仿真图。
[0049]
图9为一个实施例中在vissim仿真的平均延误对比结果图。
[0050]
图10为一个实施例中在vissim仿真的平均排队长度的对比结果图。
具体实施方式
[0051]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
[0052]
在一个实施例中,结合图1,提供了一种基于时空状态的交叉口通行时段的深度划分方法,所述方法包括以下步骤:
[0053]
步骤1,将所需优化的路口的流量数据按该数据采集的时间顺序进行排列,构建时间序列与流量的关系曲线,之后对时段进行一次分段;
[0054]
这里优选地,在其中一个实施例中,对时段进行一次分段采用基于动态规划的fisher最优分割算法。针对fisher最优分割算法:
[0055]
对于一组有序样本,观测值为x1,x2,
…
,xn,在不破坏样本间顺序的情况下,对其进行聚类的方法称为有序聚类算法,要将n个样本分割为k段,根据排列组合共有种分段方法,要遍历所有可能性,在数据量较大的情况下,例如采集的数据源是频度5分钟的流量,要将288个数据划分为8段,共有约2.9兆种可能性,因此需要花费较长时间。
[0056]
这里采用动态规划结合递归的思想提升运算速度,首先定义如下参数:
[0057]
1.1类的方差
[0058]
设某一类g包含的样本有{x(i),x(i+1),
…
,x(j)}(j》i),记为g={i,i+1,
…
,j}。该类的均值向量为
[0059][0060]
用d(i,j)表示这一类的方差,常用的方差有:
[0061][0062]
1.2分类法的损失函数为:
[0063][0064]
先计算数据间的方差表,并用二维数组记录数据,表示为{d(0,1),d(0,2),d(0,3)
…
d(0,n),d(1,2),d(1,3}
…
d(1,n),d(2,3)
…
d(2,n),
…
,d(n-1,n)},得到上述方差表后,相加即为两段的损失函数。
[0065]
根据fisher最优分割的思路,要计算k段分割最优,先将数据分为两部分,第一部分为第k段,然后寻找第二部分的k-1段最优,因此k段寻优共有n-k+1种可能性。接着计算上一步中第二部分的k-1段分割最优,还是将数据分为两部分,第一部分为第k-1段,寻找第二部分的k-2段分割最优,以此类推,一直到最后一段的2分最优。递推公式如下:
[0066][0067][0068]
通过上述步骤,可以得到流量数据在时段上的划分结果。
[0069]
示例性地,对于如图2所示的一个交叉口示意图,某一时段划分结果如图3所示。
[0070]
步骤2,选取一次分段结果中最长的时段,再进行二次深度分段,划分结果如图4所示。
[0071]
步骤3,对流量数据进行一维分割,得到各流量状态的分段点,两分段点之间为一个状态区间,处于其中的流量为同一状态;
[0072]
步骤4,根据步骤3的流量状态值对步骤1和步骤2分段后的时段进行合并;
[0073]
步骤5,利用webster算法和改进的hcm2000延误模型对各时段进行配时,且对处于同一状态值的时段使用相同的配时方案。配时方面,计算周期最常用的是webster算法,该方法计算以车辆延误时间最小为目标得到的最佳周期时长,但是该算法只适用于饱和度较低的情况,因此,在饱和度较高时,本发明采用基于美国hcm2000改进的估算公式计算周期。
[0074]
进一步优选地,在其中一个实施例中,步骤3对流量数据进行一维分割,具体采用k-means算法,获得k个流量的分段点。k-means是十大经典数据挖掘算法之一。k-means算法的基本思想是:以空间中随机k个点为中心进行聚类,对最靠近它们的对象归类。接着更新各聚类中心的值,重新归类,迭代直至得到最好的聚类结果。
[0075]
通过k-means聚类算法可以对流量数据在空间维度上进行聚类,得到k个流量的分段点,该部分的结果对后续时段合并操作起到了重要作用。
[0076]
示例性地,状态划分后得到的状态值和对应的流量分段点如下表1所示,状态划分的结果如图5所示。
[0077]
表1 k-means流量状态分割的状态值和流量分段点的对照表
[0078]
k-means状态值流量分段点11725238141085148617272098242
[0079]
进一步地,在其中一个实施例中,步骤4所述根据步骤3的流量状态值对步骤1和步骤2分段后的时段进行合并,具体过程包括:
[0080]
步骤4-1,确定每个时段的流量状态:获取该时段所包含的状态区间,之后获取每个状态区间中流量数据点的数量,将流量数据点数量最多的状态区间所对应的状态作为该时段的流量状态;
[0081]
步骤4-2,针对经步骤1和步骤2分段后的每个时段划分点,比较该划分点相邻两个时段的流量状态,若两个流量状态相同,则去除该时段划分点即将所述相邻两个时段合并。合并后的结果如图6和7所示。经过上述时段划分后,得到如下表2所示的时间序列和时段的对应表,同时得到了每个时段对应的k-means状态值,不同k-means状态值对应不同的信号控制方案。
[0082]
表2时段划分后得到的时间序列、时段以及配时方案编号
[0083]
时间序列时段k-means状态值0-390:00-3:15239-783:15-6:30178-896:30-7:25389-1047:25-8:408
104-1298:40-10:456129-14310:45-11:554143-16711:55-13:555167-19513:55-16:156195-21216:15-17:407212-26817:40-22:203268-28722:20-24:002
[0084]
进一步地,在其中一个实施例中,根据图2所示交叉口渠化,将车道编入相位进行信号控制方案设计,设计结果如下表3所示。
[0085]
表3相位编号和相位放行车道编号
[0086]
相位编号放行车道编号a1,2,3,4,5,6,16b13,14,15,20c7,8,9,10,11,12,17,18,19,20d7,8,9,10,11,12,17,18,19
[0087]
步骤5所述利用webster算法和改进的hcm2000延误模型对各时段进行配时,具体过程包括:
[0088]
步骤5-1,计算最佳信号周期时长:
[0089]
webster公式:
[0090]
若k-means状态值小于等于饱和度划分点
[0091]
hcm2000改进估算公式:
[0092]
c=1.23l
·e(2.46-0.02l)y
,若k-means状态值大于饱和度划分点
[0093]
其中,
[0094]
l=nl+ar
[0095][0096]
式中,c为最佳信号周期时长,l为交叉口总损失时长,l为每个相位的损失时间;n为相位数量,y为第i个相位的关键流量比,y为所有相位的关键流量比之和,ar为全红时长;
[0097]
步骤5-2,根据最佳信号周期时长计算绿灯时长:
[0098][0099]
式中,gi为第i个相位的绿灯时长,g
min
为第i个相位的最短绿灯时长,qi为第i个相位临界车道流量,si为第i个相位的饱和流量。
[0100]
示例性地,配时方案如下表4所示:
[0101]
表4本发明的配时方案和一次有序聚类得到的配时方案
[0102]
时段绿灯时长(a-b-c-d)时段绿灯时长(a-b-c-d)
0:00-3:1526-22-30-30(120)0:00-0:5024-23-30-30(119)3:15-6:3024-24-28-28(116)0:50-1:5523-23-29-29(116)6:30-7:2528-25-32-32(129)1:55-3:0024-21-29-29(115)7:25-8:4028-26-40-40(146)3:00-6:3023-23-29-29(116)8:40-10:4527-25-32-32(128)6:30-7:1524-24-30-30(120)10:45-11:5526-26-33-33(130)7:15-17:4028-26-41-41(148)11:55-13:5527-26-32-32(129)17:40-18:5027-25-32-32(128)13:55-16:1527-25-32-32(128)18:50-22:0028-24-32-32(128)16:15-17:4027-25-37-37(138)22:00-24:0026-24-30-30(122)17:40-22:2028-25-32-32(129)————22:20-24:0026-22-30-30(120)————
[0103]
进一步地,在其中一个实施例中,本发明使用的数据没有饱和度相关的内容,因此根据数据源和k-means聚类的结果,将k-means结果的最高状态值的80%设为饱和度较高的情况,因此步骤5-1中饱和度划分点=流量状态最高值
×
80%。例如,若最高状态值为8,则饱和度划分点为6.4。
[0104]
进一步地,在其中一个实施例中,所述方法还包括:
[0105]
步骤6,利用vissim仿真软件对不同时段的流量和配时方案进行仿真,仿真渠化图如图8所示,选择平均延误和平均排队长度作为评价指标对仿真结果进行评价,平均延误的评价结果如图9所示,平均排队长度的评价结果如图10所示。
[0106]
通过对比平均延误和平均排队长度等参数可以发现,白天(7:15-17:40)的平均排队长度优化了9%,白天的平均延误优化了12.8%,全天的平均排队长度优化了14%,全天的平均延误优化了9.5%。由于本发明算法能够对全天的交通状态进行划分、识别并缩短了白天各时段的周期时长,减少了空放现象,因此平均延误和平均排队长度均有所下降,排队长度说明本发明提出的方法对交通状态的识别更准确,对时段划分的结果更细致。
[0107]
在一个实施例中,提供了一种基于时空状态的交叉口通行时段的深度划分系统,所述系统包括:
[0108]
第一时段划分模块,用于将所需优化的路口的流量数据按该数据采集的时间顺序进行排列,构建时间序列与流量的关系曲线,之后对时段进行一次分段;
[0109]
第二时段划分模块,用于选取一次分段结果中最长的时段,再进行二次深度分段;
[0110]
流量状态划分模块,用于对流量数据进行一维分割,得到各流量状态的分段点,两分段点之间为一个状态区间,处于其中的流量为同一状态;
[0111]
时段合并模块,用于根据流量状态值对第一时段划分模块和第二时段划分模块分段后的时段进行合并;
[0112]
配时模块,用于利用webster算法和改进的hcm2000延误模型对各时段进行配时,且对处于同一状态值的时段使用相同的配时方案。
[0113]
进一步地,在其中一个实施例中,所述系统还包括:
[0114]
评价模块,用于利用vissim仿真软件对不同时段的流量和配时方案进行仿真,选择平均延误和平均排队长度作为评价指标对仿真结果进行评价。
[0115]
关于基于时空状态的交叉口通行时段的深度划分系统的具体限定可以参见上文
中对于基于时空状态的交叉口通行时段的深度划分方法的限定,在此不再赘述。上述基于时空状态的交叉口通行时段的深度划分系统中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
[0116]
以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1