一种基于光泵自旋VCSEL的储备池计算装置
一种基于光泵自旋vcsel的储备池计算装置
技术领域
1.本实用新型涉及光子储备池计算、光学、通信、自旋电子学技术领域,具体为一种基于光泵自旋vcsel的储备池计算装置。
背景技术:
2.人工神经网络(anns,artificial neural networks)是为应对当今飞速增长的信息总量而产生的类脑计算结构,在数十年不断发展完善后已成为当前无法忽视、极具潜力的机器学习方法,储备池计算(rc,reservoir computing)衍生自anns中的递归神经网络(rnns,recurrent neural networks),有利于克服rnns存在的训练困难,结构复杂等限制,但空间型rc所必须的大量非线性节点仍会导致较高的控制调节成本而很大程度限制其发展应用。
3.近年来,研究人员提出使用单个延时反馈下非线性系统的动态响应作为虚拟节点以构建时延型rc,极大降低了rc实现成本与难度。在时延反馈下可表现出丰富非线性的半导体激光器也由于其快速、高带宽、并行处理等优势在构建rc方面引起广泛关注与研究。其中,垂直腔面发射半导体激光器(vcsel,vertical
‑
cavity surface
‑
emitting laser)依靠其高能效、低制造成本、丰富偏振动态等优势在半导体激光器rc领域占据重要地位,可有效提升系统处理速率、增强性能与实现并行处理。例如,使用单个vcsel偏振动态构建储备池的方案中使用带有旋转反馈的vcsel形成双偏振模式rc被证明相较传统单模rc具有更好性能(参见[j.vatin,d.rontani,and m.sciamanna,“enhanced performance of a reservoir computer using polarization dynamics in vcsels,”opt.lett.43(18),4497
–
4500(2018).]);使用两个互耦合vcsel偏振动态的四通道rc方案(参见[x.guo,s.xiang,y.zhang,et al.“four
‑
channels reservoir computing based on polarization dynamics in mutually coupled vcsels system,”opt.express.27(16),23293
‑
23306(2019)]);利用基于vcsel的rc偏振动态并行处理两项任务的方案(参见[x.guo,s.xiang,y.zhang,et al.“polarization multiplexing reservoir computing based on a vcsel with polarized optical feedback,”in ieee journal of selected topics in quantum electronics,vol.26,no.1,pp.1
‑
9,jan.
‑
feb.2020,art no.1700109])。但这些方案使用的普通vcsel存在偏振模式不稳定、偏振不易控制的问题,制约rc工作稳定性与性能。
技术实现要素:
[0004]
本实用新型的目的在于提供一种基于光泵自旋vcsel的储备池计算装置,以解决上述背景技术中提出的问题。
[0005]
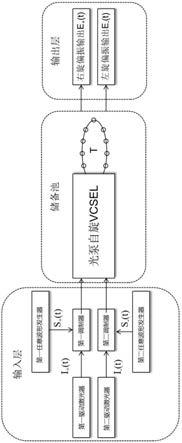
为实现上述目的,本实用新型提供如下技术方案:一种基于光泵自旋vcsel的储备池计算装置,包括输入层、储备池与输出层;
[0006]
所述输入层包括第一驱动激光器、第二驱动激光、第一任意波形发生器、第二任意
波形发生、第一调制器和第二调制器;
[0007]
所述储备池包括一个带有光反馈环路的光泵自旋vcsel,用以将输入信号进行非线性映射处理;
[0008]
所述输出层包括两个光电转换器和一个双通道示波器。
[0009]
优选的,所述第一任意波形发生器与所述第二任意波形发生器用于分别产生经预处理后的两路输入信号s
+
(t)与s
‑
(t)。
[0010]
优选的,两路所述输入信号s
+
(t)与s
‑
(t)分别通过第一调制器和第二调制器调制到所述第一驱动激光器、与所述第二驱动激光的偏振输出光i
+
(t)、i
‑
(t)上,形成两路调制光并同时注入到所述储备池中。
[0011]
优选的,所述光泵自旋vcsel输出具有左旋偏振与右旋偏振两种模式,分别受输入层产生的两路偏振调制光注入影响。
[0012]
优选的,所述光泵自旋vcsel经过光反馈环路后在两种所述偏振模式中分别产生丰富动态响应,从而将输入信号s
+
(t)与s
‑
(t)进行非线性映射处理。
[0013]
优选的,所述光电探测器用于将光信号转换为电信号;所述示波器对储备池两个自旋偏振模式中输出e+(t)和e
‑
(t)分别进行读取,以获得总的响应状态并采样得到两组虚拟节点。
[0014]
优选的,两组所述虚拟节点与对应输出权重相乘而得出光泵自旋vcsel储备池输出结果,输出权重采用线性回归算法或岭回归算法将目标值和rc输出之间的均方误差最小化来进行优化。
[0015]
优选的,所述光泵自旋vcsel中两种不同自旋偏振模式分别同时处理两项任务。
[0016]
优选的,所述第一调制器与所述第二调制器为相位调制器或强度调制器,可不采用调制器而直接用任意波形发生器输出进行调制。
[0017]
优选的,所述光反馈环路为全光反馈或光电反馈形式,光传输采用光纤或空间光传输形式。
[0018]
有益效果
[0019]
本实用新型所提供的基于光泵自旋vcsel的储备池计算装置,偏振模式稳定且易于控制,采用自旋偏振模式高度稳定且易操控的光泵自旋vcsel作为储备池,在不影响储备池装置执行任务性能的条件下,使储备池偏振模式不易受到工作环境影响,相较普通vcsel储备池展现出稳定的性能。
附图说明
[0020]
图1为本实用新型的整体结构示意图;
[0021]
图2为本实用新型的储备池系统处理单个时间序列预测任务下的预测目标与结果图;
[0022]
图3为本实用新型的储备池系统并行处理时间序列预测与波形识别任务下的结果图。
具体实施方式
[0023]
以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步
的描述,但本实用新型并不限于这些实施例。
[0024]
实施例
[0025]
如图1
‑
3所示,一种基于光泵自旋vcsel的储备池计算装置,包括输入层、储备池与输出层;
[0026]
输入层包括第一驱动激光器、第二驱动激光、第一任意波形发生器、第二任意波形发生、第一调制器和第二调制器;
[0027]
储备池包括一个带有光反馈环路的光泵自旋vcsel,用以将输入信号进行非线性映射处理;
[0028]
输出层包括两个光电转换器和一个双通道示波器。
[0029]
优选的,第一任意波形发生器与第二任意波形发生器用于分别产生经预处理后的两路输入信号s
+
(t)与s
‑
(t)。
[0030]
优选的,两路输入信号s
+
(t)与s
‑
(t)分别通过第一调制器和第二调制器调制到第一驱动激光器、与第二驱动激光的偏振输出光i
+
(t)、i
‑
(t)上,形成两路调制光并同时注入到储备池中。
[0031]
优选的,光泵自旋vcsel输出具有左旋偏振与右旋偏振两种模式,分别受输入层产生的两路偏振调制光注入影响。
[0032]
优选的,光泵自旋vcsel经过光反馈环路后在两种偏振模式中分别产生丰富动态响应,从而将输入信号s
+
(t)与s
‑
(t)进行非线性映射处理。
[0033]
优选的,光电探测器用于将光信号转换为电信号;示波器对储备池两个自旋偏振模式中输出e+(t)和e
‑
(t)分别进行读取,以获得总的响应状态并采样得到两组虚拟节点。
[0034]
优选的,两组虚拟节点与对应输出权重相乘而得出光泵自旋vcsel储备池输出结果,输出权重采用线性回归算法或岭回归算法将目标值和rc输出之间的均方误差最小化来进行优化。
[0035]
优选的,光泵自旋vcsel中两种不同自旋偏振模式分别同时处理两项任务。
[0036]
优选的,第一调制器与第二调制器为相位调制器或强度调制器,可不采用调制器而直接用任意波形发生器输出进行调制。
[0037]
优选的,光反馈环路为全光反馈或光电反馈形式,光传输采用光纤或空间光传输形式。
[0038]
在本说明书中,通过数值仿真模拟了所述光泵自旋vcsel储备池计算装置单独处理santa fe时间序列预测任务与同时处理santa fe时间序列预测与波形识别两个任务的性能,验证本实用新型单任务处理与并行处理的能力。
[0039]
针对该光泵自旋vcsel储备池计算装置,建立速率方程如下:
[0040][0041][0042]
[0043][0044]
其中,下标+,
‑
分别表示右旋偏振模式与左旋偏振模式。e表示光泵自旋vcsel的电场复振幅,n为总载流子密度,m为归一化载流子密度差值,e
inj
表示驱动激光器注入影响,κ为光场衰减速率,α为线宽增强因子,γ
a
和γ
p
分别代表有源区介质的线性色散效应和双折射效应,γ为载流子衰减速率,γ
s
为自旋反转速率,η
±
分别表示两偏振对应的归一化光泵浦量,总光泵浦量与椭圆偏振度各自定义为η=η
+
+η
‑
和p=(η
+
‑
η
‑
)/(η
+
+η
‑
),β为自发辐射噪声因子,ξ
±
为高斯白噪声,k
f
和τ分别表示反馈强度与延迟时间,k
inj
表示注入强度,e0为驱动激光器注入强度,
△
f为光注入频率失协。预处理后输入信号s
±
(t)=u
±
(n)
×
mask(t),其中u
±
(n)为与任务相对应的输入,mask(t)为掩码信号。仿真中各参数取值为:κ=230ns
‑1;α=4;γ=0.68ns
‑1;γ
a
=0;γ
p
=8.8*πns
‑1;p=0.1;η=1.5;γ
s
=30ns
‑1;φ0=0;|e0|=1.5;
△
f=
‑
20ghz;τ=1ns;k
f
=30ns
‑1;k
inj
=40ns
‑1;θ=10ps;β=1*10
‑6。
[0045]
在所述输入层中使输入u
±
(n)相同且对应于同一任务,设置虚拟节点间隔θ为10ps,将光泵自旋vcsel在反馈环中两自旋偏振模式下的响应进行采样,得到共2τ/θ个虚拟节点并用于计算,可对单个任务进行处理。附图2所示为使用所述光泵自旋vcsel储备池计算装置进行单个时间序列预测任务处理的目标、预测结果及误差。从图2可看出,预测结果与预测目标十分接近,且计算得到归一化均方误差nmse值为0.002629,说明光泵自旋vcsel储备池计算装置具有良好的预测性能。
[0046]
在输入层中使输入u
±
(n)分别对应两项不同任务,对光泵自旋vcsel在两自旋偏振模式下的响应各自进行采样并分别用于两种任务的计算,可实现两项任务的并行处理。附图3所示为使用所述光泵自旋vcsel储备池计算装置并行处理santa fe时间序列预测和波形识别任务时的预测目标、预测结果、输入波形、分类目标与结果。从图3可以看出,时间序列预测结果与目标接近且对不同波形进行分类的结果与目标相符,两项任务对应的归一化均方误差nmse值分别为0.043326与0.040147,说明光泵自旋vcsel储备池计算装置具有良好的并行计算能力。
[0047]
最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型性的保护范围之内的实用新型内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1