作业管理装置以及程序的制作方法
1.本发明涉及一种作业管理装置以及程序。
背景技术:
2.已知有一种在系统中支持零件的拾取或装配等的作业的技术。
3.例如专利文献1中记载了:使用扩展现实装置来对作业者指示放入有要拾取的物品的保管部,由此来实现作业效率的提高。
4.而且,专利文献2中记载了一种系统:在装配作业中,指示出作业者接下来要螺固部件的螺丝孔的位置。
5.现有技术文献
6.专利文献
7.专利文献1:日本专利特开2014-43353号公报
8.专利文献2:日本专利特开2019-12432号公报
技术实现要素:
9.发明所要解决的问题
10.但是,专利文献1、专利文献2所记载的以往方法中,尽管进行了拾取或装配等单个作业的支持,但并未遍及多个作业工序来使作业整体效率化。而且,近年来,作业者与机器人共同进行作业的情况也变多,正寻求通过统一管理两者的作业来实现作业的效率化。
11.本发明是有鉴于所述情况而完成,目的在于提供一种技术,遍及一连串的工序来管理作业,由此来使作业整体效率化。
12.解决问题的技术手段
13.为了解决所述问题,本发明采用以下的结构。
14.本发明的一方面的作业管理装置对作业进行管理,所述作业管理装置包括:作业规定获取部,获取所述作业的各工序中的作业规定的信息;作业辅助信息显示部,基于所述作业规定,使在各工序中进行作业的作业者所佩戴的作业者用眼镜显示对作业进行辅助的信息;机器人控制部,基于所述作业规定,来控制在各工序中进行作业的作业用机器人;作业实绩信息获取部,获取由所述作业者所实施的作业的信息与由所述作业用机器人所实施的作业的信息;以及作业结果判定部,基于由所述作业者所实施的作业的信息与由所述作业用机器人所实施的作业的信息,来判定各个作业是否已按所述作业规定完成。通过所述结构,能够统一而无遗漏地管理一连串工序的作业的内容与进展状况,从而使作业整体效率化。
15.所述结构中,所谓作业规定的信息,是指对各工序中的作业者的作业进行辅助的信息或作业用机器人的控制信息,包含作业所需的作业用零件的种类与个数的信息、各零件的保管场所的信息、或者与零件的安装位置或安装顺序相关的信息等。而且,所谓作业者用眼镜,是指作业者所佩戴的扩展现实装置,可在显示器上显示对作业进行辅助的信息。
16.而且,也可为,在从保管库中取出一连串的作业所需的零件并置于零件箱中的拾取工序中,所述作业实绩信息获取部获取所述作业者从保管库取出的作业用零件的种类以及个数的信息、与由所述作业用机器人从保管库中取出的作业用零件的种类以及个数的信息,所述作业结果判定部判定由所述作业者以及所述作业用机器人所进行的按照所述作业规定的拾取是否已完成,所述作业管理装置还包括零件箱识别编号赋予部,所述零件箱识别编号赋予部当判定为按照所述作业规定的拾取已完成,则在贴附于所述零件箱的无线通信标签中记录零件箱识别编号,所述零件箱识别编号与使用所述零件箱中的作业用零件的后工序的信息相关联。由此,能够防止错误的零件放入零件箱中,并且能够利用零件箱识别编号来高效地管理作业中产生的信息。
17.而且,也可还包括:库存补充指示部,基于所述作业者从保管库中取出的作业用零件的种类以及个数的信息、与由所述作业用机器人从保管库中取出的作业用零件的种类以及个数的信息,输出应进行补充的作业用零件的种类与个数的信息,以使所述保管库内的各个作业用零件的库存成为规定数量。由此,能够适当地确保保管库内的作业用零件的库存数,防止在作业中造成库存不足。
18.而且,也可为,所述零件箱被载置于移动体,所述作业管理装置还包括:零件箱移动控制部,当所述零件箱识别编号被记录到无线通信标签中时,使所述移动体移动到进行与所述零件箱识别编号相应的下个工序的规定区域;以及零件箱到达探测部,经由与所述无线通信标签的无线通信来探测载有所述零件箱的移动体已到达所述规定区域的情况,所述作业辅助信息显示部将载有所述零件箱的移动体已到达所述规定区域的意旨显示于在所述工序中进行作业的作业者所佩戴的作业者用眼镜。由此,能够在适当的时机对作业者提供作业信息,并且能够防止在作业中使用错误的零件箱。
19.而且,也可为,在各个作业用零件,贴附有确定零件的种类的码信息,所述作业结果判定部经由所述作业者用眼镜的码读取部件来获取贴附于由所述作业者所取出的作业用零件的码信息,由此来判定所述作业者是否正进行按照所述作业规定的拾取。由此,能够防止拾取的错误,即便在拾取了错误的零件的情况下,也能够立即修正作业。
20.而且,也可为,在各个作业用零件,贴附有确定零件的种类的码信息,所述作业结果判定部经由所述作业用机器人的码读取部件来获取贴附于所述零件箱中的作业用零件的码信息,由此来判定按照所述作业规定的拾取是否已完成。由此,能够在前进至下个工序之前确认零件箱内容物无误。
21.而且,也可还包括:故障发生信息获取部,获取所述作业者判断为作业产生了故障时经由所述作业者用眼镜而输入的故障发生信息;以及故障信息管理部,将所述故障信息与输入了所述故障信息的作业者正在使用的零件箱的零件箱识别编号关联来进行管理。由此,在故障应对时,能够基于与零件箱识别编号关联而记录的故障信息来进行修正等的应对。
22.而且,也可还包括:故障有无判定部,判定是否与所述零件箱识别编号关联而登记有所述故障信息;以及故障发生时移动控制部,使被判定为与所述零件箱识别编号关联而登记有所述故障信息的零件箱移动到进行故障应对的区域。由此,能够将放入有未修正品等的零件箱无遗漏地运用于故障应对。
23.而且,也可还包括:作业不合格信息获取部,在通过所述作业者所使用的工具而探
测到作业的不合格时,从所述工具获取作业不合格信息;以及作业图像获取部,在探测到所述作业的不合格时,获取经由所述作业者用眼镜而拍摄的所述作业者的视野图像。由此,能够将这些信息作为故障信息而与零件箱识别编号关联予以记录。
24.本发明的一方面的程序使对作业进行管理的计算机作为下述部分而发挥功能,即:作业规定获取部,获取所述作业的各工序中的作业规定的信息;作业辅助信息显示部,基于所述作业规定,使在各工序中进行作业的作业者所佩戴的作业者用眼镜显示对作业进行辅助的信息;机器人控制部,基于所述作业规定,来控制在各工序中进行作业的作业用机器人;作业实绩信息获取部,获取由所述作业者所实施的作业的信息与由所述作业用机器人所实施的作业的信息;以及作业结果判定部,基于由所述作业者所实施的作业的信息与由所述作业用机器人所实施的作业的信息,来判定各个作业是否已按所述作业规定完成。通过所述结构,能够统一而无遗漏地管理一连串工序的作业的内容与进展状况,从而使作业整体效率化。
25.发明的效果
26.根据本发明,能够提供一种通过遍及一连串的工序来管理作业而使作业整体效率化的技术。
附图说明
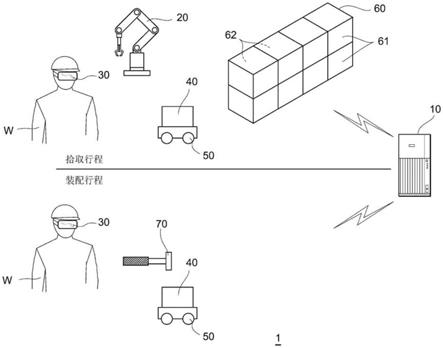
27.图1是表示本发明的适用例的示意图。
28.图2是表示本发明的实施方式的作业管理装置10的硬件结构的一例的框图。
29.图3是表示本发明的实施方式的作业管理装置10的功能结构的一例的框图。
30.图4是表示本发明的实施方式的作业管理系统1的拾取工序中的动作的一例的序列图。
31.图5是表示本发明的实施方式的显示于作业者用眼镜30的拾取作业状况画面的一例的图。
32.图6是表示本发明的实施方式的作业管理系统1所进行的零件库存管理动作的一例的流程图。
33.图7是表示本发明的实施方式的作业管理系统1的手动装配工序中的动作的一例的序列图。
34.图8是表示本发明的实施方式的显示于作业者用眼镜30的装配作业指示画面的一例的图。
35.图9是表示本发明的实施方式的显示于作业者用眼镜30的强制完成画面的一例的图。
36.图10是表示本发明的实施方式的作业管理系统1的故障应对工序中的动作的一例的流程图。
具体实施方式
37.以下,基于附图来说明本发明的一方面的实施方式(以下也称作“本实施方式”)。但是,以下所说明的实施方式在所有方面不过是本发明的例示。当然可不脱离本发明的范围而进行各种改良或变形。即,在本发明的实施时,也可适当采用与实施方式相应的具体结
构。另外,通过自然语言说明了本实施方式中出现的数据,但更具体而言,是以计算机可识别的伪语言、命令、参数、机器语言等来指定。
38.§
1适用例
39.首先,使用图1来说明适用本发明的场景的一例。图1是示意性地表示适用本发明的作业管理装置10的场景的一例即作业管理系统1的示例的图。图1的示例中,作业管理系统1对作业场所中的包含拾取工序与装配工序的一连串作业进行管理。如图1所示,作业管理系统1包括:作业管理装置10、作业用机器人20、作业者w像眼镜那样佩戴的扩展现实装置即作业者用眼镜30、放入用于作业的作业用零件的工具箱(kit box)(零件箱)40、载置有工具箱40的移动体50、保管有作为拾取对象的作业用零件的送料槽(chute)(保管库)60、以及作业者w在装配作业中所使用的扭矩扳手(torque wrench)(工具)70。作业管理装置10可分别经由专用的网关(gateway)来与作业用机器人20、作业者用眼镜30、移动体50、扭矩扳手70进行通信连接。
40.作业管理装置10基于与一连串的作业相关的信息(作业规定的信息),来对各工序的作业进行管理。作业规定的信息包含:作业所需的作业用零件的种类与个数的信息、各零件的保管场所的信息、或者与零件的安装位置或安装顺序相关的信息等。作业管理装置10利用作业者用眼镜30的扩展现实功能来显示这些信息。由此,作业者w通过作业者用眼镜30来查看实际的作业场所,由此可获得对作业进行辅助的信息。而且,作业管理装置10基于作业规定的信息来控制作业用机器人20使其执行作业。
41.进而,作业管理装置10对由作业者与作业用机器人20所实施的作业的内容进行管理,判断各个作业是否已按作业规定完成。而且,将作业的进展状况显示于作业者用眼镜30。由此,作业者w能够确认自身应进行的作业与作业用机器人20所负责的作业这两者的状况。
42.进而,作业管理装置10配合作业工序的进展来控制工具箱40的移动。在工具箱40中,当在拾取工序中放入按照作业规定而定的作业用零件时,赋予序列号(零件箱识别编号)。作业管理装置10通过序列号来管理工具箱40,并根据作业的进展状况来使载置有所述工具箱40的移动体50移动到适当的场所。而且,在工具箱40中,还放入有使用其中的零件而装配的完成品或未修正品(在装配工序中发生了故障,进行修理之前的状态者)。
43.§
2结构例
44.(1.硬件结构)
45.图2是表示本实施方式中的作业管理装置10的硬件结构的一例的框图。图2的示例中,作业管理装置10是由控制部11、存储部12、通信接口13、输入装置14、输出装置15电连接而成的计算机。
46.控制部11包含中央处理器(central processing unit,cpu)、随机存取存储器(random access memory,ram)、只读存储器(read only memory,rom)等,通过cpu执行保存在rom等中的程序来实现各种功能。
47.存储部12例如是硬盘驱动器等辅助存储装置。在存储部12中,存储有作业的各工序中的作业规定的信息、或与对工具箱40赋予的序列号相关联的各种信息(故障信息等)。
48.通信接口13包含网关装置,所述网关装置供作业管理装置10与作业用机器人20、作业者用眼镜30、载置有工具箱40的移动体50、扭矩扳手70等进行通信。
49.输入装置14例如是鼠标、键盘等用于进行输入的装置。输出装置15例如是显示器、扬声器等用于进行输出的装置。
50.另外,关于作业管理装置10的具体的硬件结构,可根据实施方式来适当地进行构成元件的省略、替换以及追加。例如,控制部11也可包含多个处理器。而且,作业管理装置10也可包含多台信息处理装置。而且,作业管理装置10除了专为所提供的服务而设计的信息处理装置以外,还可使用通用的桌面个人计算机(personal computer,pc)、平板pc等。
51.作业用机器人20例如是通过作业管理装置10的控制来进行拾取作业等的带有臂的机器人。作业用机器人20还具有摄像机功能或二维码的读取功能,能够将所拍摄的图像发送至作业管理装置10。
52.作业者用眼镜30是作业者w所佩戴的眼镜型的扩展现实装置。眼镜的透镜部分具有显示器的功能,作业者w能够看到重叠于透过眼镜所看到的实际的周围状况而显示在显示器上的画面。作业者用眼镜30具有摄像机功能,能够拍摄作业者w透过眼镜所看到的实际的现场状况并将图像发送至作业管理装置10。而且,作业者用眼镜30具有语音识别功能,作业者w能够通过语音来进行对作业者用眼镜30的指示操作。而且,作业者用眼镜30能够将由作业者w所输入的语音数据发送至作业管理装置10。而且,作业者用眼镜30具有二维码的读取功能。
53.移动体50是搬运工具箱40的装置,根据作业管理装置10的指示而在作业场所内移动。在移动体50的上表面设有输送器,以将工具箱40载于输送器上。
54.扭矩扳手70是作业者对工件紧固零件时所使用的工具,测量紧固零件时的扭矩值并发送至作业管理装置10。
55.(2.功能结构)
56.接下来,使用图3来说明本实施方式的作业管理装置10的功能结构的一例。图3是表示作业管理装置10的功能结构的一例的框图。
57.作业管理装置10的控制部11例如将存储在rom中的作业管理程序展开到ram中。并且,控制部11通过cpu来对展开到ram中的程序进行解释及执行,以控制各构成元件。由此,如图3所示,本实施方式的作业管理装置10作为包括作业规定获取部101、作业辅助信息显示部102、机器人控制部103、作业实绩信息获取部104、作业结果判定部105、零件箱识别编号赋予部106、库存补充指示部107、零件箱移动控制部108、零件箱到达探测部109、故障发生信息获取部110、故障信息管理部111、故障有无判定部112、故障发生时移动控制部113、作业不合格信息获取部114、作业图像获取部115的计算机发挥功能。
58.(3.动作)
59.接下来,对本实施方式的作业管理系统1的处理流程进行说明,处理流程分为(3-1)拾取工序、(3-2)零件的库存管理、(3-3)手动装配工序、(3-4)故障应对工序来进行说明。
60.(3-1.拾取工序)
61.首先,对拾取工序中的作业管理系统1的动作进行说明,图4是表示作业管理系统1的拾取工序中的动作的一例的序列图。拾取工序中,基于作业管理装置10所管理的作业规定,作业者w与作业用机器人20进行协作而从送料槽60拾取作业用零件并放入工具箱40中。
62.送料槽60是预先对被拾取的零件进行分类保管的搁板,内部被分隔为多个小房间,在各小房间中保管有一种零件。在搁板的两面设有对各小房间的投入口61与取出口62,
frequency identification,rfid)标签写入序列号(s111)。另外,在工具箱40中放入有错误的零件的情况下,在作业者用眼镜30上显示与误拾取的零件对应的档口与零件名等,并显示敦促修正作业的消息等。一旦由作业者w进行了正确的零件的拾取,则进行删除消息并对工具箱40写入序列号的处理。
70.一旦对工具箱40赋予了序列号,则作业管理装置10使载置有工具箱40的移动体50移动到进行下个工序(手动装配工序)的场所(s112)。
71.(3-2.零件的库存管理)
72.接下来说明作业管理系统1所进行的零件的库存管理,图6是表示作业管理系统1所进行的零件的库存管理的动作的一例的流程图。作业管理装置10对保管在送料槽60中的作业用零件的库存数进行管理,并基于作业规定,在适当的时机进行零件的补充。
73.作业管理装置10基于拾取工序中的作业状况,算出保管在送料槽60中的各零件的最新的库存数(s201)。进而,作业管理装置10获取基于生产日程等信息而决定的每个零件的适当的库存数(s202)。作业管理装置10对于各零件,根据适当的库存数与当前的库存数的差值,算出应补充至送料槽60的个数(s203)。所算出的每个零件的应补充的个数被通知给仓库的系统等,从仓库补充至送料槽60(s204)。补充时,从投入口61供给零件。另外,零件从仓库向送料槽60的搬送与零件向投入口61的投入也可通过由作业管理装置10予以控制的可移动的机械臂等来进行。
74.(3-3.手动装配工序)
75.接下来说明手动装配工序中的作业管理系统1的动作。图7是表示作业管理系统1的手动装配工序中的动作的一例的序列图。在手动装配工序中,基于作业管理装置10所管理的作业规定,作业者w使用工具箱40中的零件来进行装配作业。此处,作业者w是对利用作业场所的带式输送器或移动体(mobile)搬送而来的工件(发动机或车身等作业对象)紧固工具箱40内的零件。
76.作业者w通过所佩戴的作业者用眼镜30来读取用于开始手动装配工序的二维码等,由此,作业者用眼镜30经由网关来与作业管理装置10连接(s301)。二维码例如被设置在进行装配作业(紧固作业)的作业场所的经规定的场所。
77.进而,当载有放入有零件的工具箱40的移动体50到达进行装配作业的场所时,通过设置在作业场所的rfid天线来读取在贴附于工具箱40的rfid标签中写入的序列号。所读取的序列号被发送至作业管理装置10(s302)。
78.作业管理装置10将与所收到的序列号对应的装配作业的作业规定的信息发送至作业者用眼镜30(s303)。作业者用眼镜30基于从作业管理装置10收到的信息而在显示器上显示“装配作业指示画面”(s304)。
79.图8是表示显示于作业者用眼镜30的装配作业指示画面的一例的图。如图8所示,装配作业指示画面是以在作业者w查看时与实际的工件重叠的方式予以显示。具体而言,显示序列号p1、指示内容一览p4、表示工件上的作业部位(紧固零件的部位)的标记p5与作业信息p6。在序列号p1中,显示对工具箱40所赋予的序列号。
80.指示内容一览p4是进行紧固的部位(以名称或编号来显示)、要紧固的零件编号与个数、紧固时的扭矩、角度、作业状态等的一览。当紧固完成时,对应的指示的作业状态的显示被更新为“完毕”。标记p5例如是以利用框来包围实际的紧固部位的方式予以显示。在作
业信息p6中,显示关于作业中的部位的指示内容。
81.作业者w按照显示于装配作业指示画面的指示来推进紧固作业。作业者w使用扭矩扳手70等的工具来进行零件的紧固。扭矩扳手70测定零件的紧固时的扭矩值、角度,并将扭矩值、角度、紧固结果是否适当的判定结果发送至作业管理装置10(s305)。作业管理装置10将判定结果发送至作业者用眼镜30(s306)。作业者用眼镜30将所收到的判定结果(可(ok)或否(ng))显示于显示器。若判定结果为“可(ok)”,则所述作业指示的作业状态更新为“完毕”。
82.当所有作业指示的作业状态变为“完毕”时,作业管理装置10向作业者用眼镜30通知紧固作业已完成的意旨并使其显示消息等(s307)。在将已装配的完成品进一步移动到下个作业工序(下个装配工序或出货工序)的作业场所时,作业者w将完成品放入至放入有零件的工具箱40。载有放入有完成品的工具箱40的移动体50通过作业管理装置10的控制而移动到进行下个工序的场所。
83.另一方面,若判定结果为“否(ng)”,则作业者用眼镜30通过摄像机来拍摄对象紧固部位,并将图像发送至作业管理装置10(s308)。作业管理装置10与作业中的序列号关联来记录故障信息(s309)。在故障信息中,除了紧固部位与零件编号、紧固时的扭矩值等以外,还包含由作业者用眼镜30所拍摄的对象紧固部位的图像。
84.而且,当作业者w在作业中发现了某些故障时,可通过语音来进行强制完成。若作业者w指示了强制完成,则在作业者用眼镜30的显示器上显示“强制完成画面”(s310)。
85.图9是表示显示于作业者用眼镜30的强制完成画面的一例的图。如图9所示,在强制完成画面上,显示输入菜单p7(“原因代码”、“故障内容”、“故障部位”、“完成”、“取消”)。
86.当作业者w在强制完成画面上选择菜单“原因代码”时(发出“原因代码”的语音),显示原因代码编号与强制完成的理由的一览(例如,01:当前工序中的修正、02:当前工序以外的修正、03:所有工序中止等)。当作业者w选择原因代码时(例如发出“01”的语音),受理所选择的原因代码的信息,并再次显示强制完成画面。
87.当作业者w在强制完成画面上选择菜单“故障内容”时(发出“故障内容”的语音),显示敦促语音输入故障内容的消息。当作业者w通过语音输入故障内容时,受理所输入的语音数据,并再次显示强制完成画面。
88.当作业者w在强制完成画面上选择菜单“故障部位”时(发出“故障部位”的语音),显示告知将利用摄像机来拍摄作业者w所看着的故障部位的消息,并在数秒后执行拍摄。拍摄后,再次显示强制完成画面。
89.当作业者w在强制完成画面上选择“完成”时(发出“完成”的语音),将所登记的原因代码、故障内容、故障部位的图像发送至作业管理装置10,当前序列号的工序结束(s311)。而且,当作业者w在强制完成画面上选择“取消”时(发出“取消”的语音),则取消所输入的原因代码等的内容,返回原本的装配作业指示画面。
90.作业管理装置10将所收到的故障信息(原因代码、故障内容、故障部位的图像)与作业中的序列号关联而予以记录(s312)。
91.(3-4.故障应对工序)
92.接下来说明故障应对工序中的作业管理系统1的动作。图10是表示作业管理系统1的故障应对工序中的动作的一例的流程图。
93.在装配工序中,当作业正常完成或强制完成时,作业管理装置10使对应的序列号的工具箱40移动到下个工序。此时,登记有故障信息的序列号的工具箱40(s401:是)被搬送到进行故障应对作业的场所(s402)。未登记有故障信息的序列号的工具箱40(s401:否)被搬送到进行通常的下个工序的场所(s403)。
94.进行故障应对的作业者w一边参照与工具箱40的序列号关联而记录的故障信息,一边进行工具箱40内的故障品等的修理等作业(s404)。
95.如上所述,根据本实施方式,作业管理装置10在作业者所佩戴的作业者用眼镜30上显示与作业相关的信息,并且对作业者所进行的作业、作业用机器人20所进行的作业的内容与进展状况进行管理。由此,能够统一而无遗漏地管理一连串作业的内容与进展状况,从而使作业整体效率化。
96.而且,在拾取工序中,一并管理作业者所进行的拾取的状况与作业用机器人20所进行的拾取的状况,一旦确认两者的拾取已全部正确进行,便对工具箱40赋予作业的序列号。进而,将使用此工具箱40所进行的各工序中的作业信息与序列号关联来进行管理,因此能够防止错误的零件放入工具箱40中,并且能够利用序列号来高效地管理在作业中产生的信息。
97.而且,基于由作业者以及作业用机器人20所拾取的零件的种类与个数,来判定应向送料槽60补充的零件的种类与个数。由此,能够适当地确保送料槽60内的零件的库存数,既能防止在作业中造成库存不足,也能防止供给过剩。
98.而且,赋予有序列号的工具箱40被载于移动体50,能够按照与序列号相关联的信息来控制移动。而且,一旦探测到工具箱40已移动到下个工序的场所,便在作业者的作业者用眼镜30上显示与所述序列号对应的作业信息。由此,能够在适当的时机对作业者提供作业信息,并且能够防止在作业中使用错误的工具箱40。
99.而且,对于保管在送料槽60中的作业用零件,贴附有每个零件种类的码,作业者在拾取零件时利用作业者用眼镜30来读取所述码,由此,作业管理装置10判定是否为正确的零件。由此,能够防止作业的错误,即便在拾取了错误的零件的情况下,也能够立即修正作业。
100.而且,一旦拾取作业完成,便通过作业用机器人20来读取工具箱40中的所有零件的码,以最终确认是否无错误的零件或遗漏,因此能够在前进至下个工序之前,确认工具箱40的内容物无误。
101.而且,在手动装配工序中发生了故障的情况下,经由作业者用眼镜30来语音输入故障的内容,或者拍摄故障部位而登记故障信息,并将故障信息与序列号关联予以记录。由此,在进行故障应对时,能够基于与序列号关联而记录的故障信息来进行修正等的应对。
102.而且,作业管理装置10在与序列号关联而登记有故障信息的情况下,将相应的工具箱40运用到故障应对工序中,因此能够将放入有未修正品等的工具箱40无遗漏地运用到故障应对中。
103.而且,在通过作业者用于紧固作业的扭矩扳手70而对于紧固作业中的扭矩值等探测到不合格的情况下,将不合格的信息发送至作业管理装置10,进而,将产生了不合格的作业部位的拍摄图像发送至作业管理装置10。由此,作业管理装置10能够将这些信息作为故障信息而与序列号关联予以记录。
104.以上,详细说明了本发明的实施方式,但直至所述为止的说明在所有方面不过是本发明的例示。当然可不脱离本发明的范围而进行各种改良或变形。另外,所述实施方式的一部分或全部也可如以下的附注那样记载,但并不限于以下。
105.(附注1)
106.一种作业管理装置(10),对作业进行管理,所述作业管理装置(10)包括:
107.作业规定获取部(101),获取所述作业的各工序中的作业规定的信息;
108.作业辅助信息显示部(102),基于所述作业规定,使在各工序中进行作业的作业者所佩戴的作业者用眼镜(30)显示对作业进行辅助的信息;
109.机器人控制部(103),基于所述作业规定,来控制在各工序中进行作业的作业用机器人(20);
110.作业实绩信息获取部(104),获取由所述作业者所实施的作业的信息与由所述作业用机器人(20)所实施的作业的信息;以及
111.作业结果判定部(105),基于由所述作业者所实施的作业的信息与由所述作业用机器人(20)所实施的作业的信息,来判定各个作业是否已按所述作业规定完成。
112.(附注2)
113.根据附注1所述的作业管理装置(10),其中
114.在从保管库(60)中取出一连串的作业所需的零件并置于零件箱(40)中的拾取工序中,
115.所述作业实绩信息获取部(104)获取所述作业者从保管库(60)取出的作业用零件的种类以及个数的信息、与由所述作业用机器人(20)从保管库(60)中取出的作业用零件的种类以及个数的信息,
116.所述作业结果判定部(105)判定由所述作业者以及所述作业用机器人(20)所进行的按照所述作业规定的拾取是否已完成,
117.所述作业管理装置(10)还包括零件箱识别编号赋予部(106),所述零件箱识别编号赋予部(106)当判定为按照所述作业规定的拾取已完成,则在贴附于所述零件箱(40)的无线通信标签中记录零件箱识别编号,
118.所述零件箱识别编号与使用所述零件箱(40)中的作业用零件的后工序的信息相关联。
119.(附注3)
120.根据附注2所述的作业管理装置(10),还包括:库存补充指示部(107),基于所述作业者从保管库(60)中取出的作业用零件的种类以及个数的信息、与由所述作业用机器人(20)从保管库(60)中取出的作业用零件的种类以及个数的信息,输出应进行补充的作业用零件的种类与个数的信息,以使所述保管库(60)内的各个作业用零件的库存成为规定数量。
121.(附注4)
122.根据附注2所述的作业管理装置(10),其中
123.所述零件箱(40)被载置于移动体(50),
124.所述作业管理装置(10)还包括:
125.零件箱移动控制部(108),当所述零件箱识别编号被记录到无线通信标签中时,使
所述移动体(50)移动到进行与所述零件箱识别编号相应的下个工序的规定区域;以及
126.零件箱到达探测部(109),经由与所述无线通信标签的无线通信来探测载有所述零件箱(40)的移动体(50)已到达所述规定区域的情况,
127.所述作业辅助信息显示部(102)将载有所述零件箱(40)的移动体(50)已到达所述规定区域的意旨显示于在所述工序中进行作业的作业者所佩戴的作业者用眼镜(30)。
128.(附注5)
129.根据附注2所述的作业管理装置(10),其中
130.在各个作业用零件,贴附有确定零件的种类的码信息,
131.所述作业结果判定部(105)经由所述作业者用眼镜(30)的码读取部件来获取贴附于由所述作业者所取出的作业用零件的码信息,由此来判定所述作业者是否正进行按照所述作业规定的拾取。
132.(附注6)
133.根据附注2所述的作业管理装置(10),其中
134.在各个作业用零件,贴附有确定零件的种类的码信息,
135.所述作业结果判定部(105)经由所述作业用机器人(20)的码读取部件来获取贴附于所述零件箱(40)中的作业用零件的码信息,由此来判定按照所述作业规定的拾取是否已完成。
136.(附注7)
137.根据附注1所述的作业管理装置(10),还包括:
138.故障发生信息获取部(110),获取所述作业者判断为作业产生了故障时经由所述作业者用眼镜(30)而输入的故障发生信息;以及
139.故障信息管理部(111),将所述故障信息与输入了所述故障信息的作业者正在使用的零件箱(40)的零件箱识别编号关联来进行管理。
140.(附注8)
141.根据附注7所述的作业管理装置(10),还包括:
142.故障有无判定部(112),判定是否与所述零件箱识别编号关联而登记有所述故障信息;以及
143.故障发生时移动控制部(113),使被判定为与所述零件箱识别编号关联而登记有所述故障信息的零件箱(40)移动到进行故障应对的区域。
144.(附注9)
145.根据附注1所述的作业管理装置(10),还包括:
146.作业不合格信息获取部(114),在通过所述作业者所使用的工具(70)而探测到作业的不合格时,从所述工具(70)获取作业不合格信息;以及
147.作业图像获取部(115),在探测到所述作业的不合格时,获取经由所述作业者用眼镜(30)而拍摄的所述作业者的视野图像。
148.(附注10)
149.一种程序,使对作业进行管理的计算机(10)作为下述部分而发挥功能,即:
150.作业规定获取部(101),获取所述作业的各工序中的作业规定的信息;
151.作业辅助信息显示部(102),基于所述作业规定,使在各工序中进行作业的作业者
所佩戴的作业者用眼镜(30)显示对作业进行辅助的信息;
152.机器人控制部(103),基于所述作业规定,来控制在各工序中进行作业的作业用机器人(20);
153.作业实绩信息获取部(104),获取由所述作业者所实施的作业的信息与由所述作业用机器人(20)所实施的作业的信息;以及
154.作业结果判定部(105),基于由所述作业者所实施的作业的信息与由所述作业用机器人(20)所实施的作业的信息,来判定各个作业是否已按所述作业规定完成。
155.符号的说明
156.1:作业管理系统
157.10:作业管理装置
158.11:控制部
159.12:存储部
160.13:通信接口
161.14:输入装置
162.15:输出装置
163.20:作业用机器人
164.30:作业者用眼镜
165.40:工具箱
166.50:移动体
167.60:送料槽
168.61:投入口
169.62:取出口
170.70:扭矩扳手
171.101:作业规定获取部
172.102:作业辅助信息显示部
173.103:机器人控制部
174.104:作业实绩信息获取部
175.105:作业结果判定部
176.106:零件箱识别编号赋予部
177.107:库存补充指示部
178.108:零件箱移动控制部
179.109:零件箱到达探测部
180.110:故障发生信息获取部
181.111:故障信息管理部
182.112:故障有无判定部
183.113:故障发生时移动控制部
184.114:作业不合格信息获取部
185.115:作业图像获取部
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1