仿真真实世界场景中变形的计算机实现方法、电子装置及计算机可读存储介质与流程
仿真真实世界场景中变形的计算机实现方法、电子装置及计算机可读存储介质
1.相关申请的交叉引用
2.本技术要求于2020年1月6日向美国专利商标局提交的美国专利申请序号62/957,702的优先权及权益,其全部内容通过引用并入本文。
技术领域
3.本公开涉及增强现实技术领域,更具体地,涉及一种用于仿真一真实世界场景中的一变形的计算机实现方法、一种电子装置及一种计算机可读存储介质。
背景技术:
4.在诸多框架及诸多装置诸如hololens、magic leap one、arcore及arkit上被呈现的一增强现实(ar)应用程序中可以提前扫描及存储一真实世界静态场景的几何信息,并且一场景地图可据以被建立,即三维(3d)重建。
5.一种ar应用程序是以物理仿真(例如变形)来增强在所述场景中的(诸多)真实对象。具体地,所述仿真的(诸多)视觉结果可以被添加到所述提前扫描的场景中,例如,在一墙体上进行虚拟钻孔,及在地板上进行虚拟开裂。对诸多真实对象进行虚拟变形的物理仿真,例如,使一雕塑的一部分变形,及以仿真结果对真实雕塑进行增强用于显示,可被应用于诸多领域,诸如艺术、游戏及医疗照护。
技术实现要素:
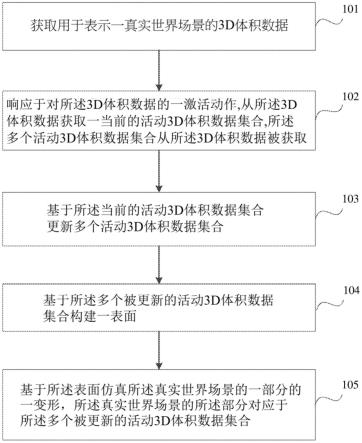
6.本公开的一第一方面提供一种计算机实现的方法,包括:获取用于表示一真实世界场景的三维(3d)体积数据;响应于对所述3d体积数据的一激活动作,从所述3d体积数据获取一当前的活动3d体积数据集合;基于所述当前的活动3d体积数据集合更新多个活动3d体积数据集合,所述多个活动3d体积数据集合从所述3d体积数据被获取;基于所述多个被更新的活动3d体积数据集合构建一表面;及基于所述表面仿真所述真实世界场景的一部分的一变形,所述真实世界场景的所述部分对应于所述多个被更新的活动3d体积数据集合。
7.本公开的一第二方面提供一种电子装置,包括:一存储器;一处理器;及一计算机程序,被存储在所述存储器上且可在所述处理器上操作。当所述程序由所述处理器执行时,根据所述第一方面的所述方法被实现。
8.本公开的一第三方面提供一种计算机可读存储介质,其上存储一计算机可读存储指令。所述计算机可读存储程序被配置为致使一计算机实现根据所述第一方面的所述方法。
9.本公开的诸多实施例的诸多附加方面和优点将部分地在如下描述中给出,部分地从如下描述中变得显而易见,或者从本公开的诸多实施例的实践中被获知。
附图说明
10.本公开的诸多实施例的上述及/或附加的方面及优点将从参考附图作出的如下描述中变得明显及更容易理解,其中:
11.图1是根据本公开的一实施例的一种用于一增强现实场景的方法的一流程图。
12.图2是根据本公开的一实施例的一种用于一增强现实场景的方法的一流程图。
13.图3是根据本公开的一实施例的一种用于一增强现实场景的方法的一流程图。
14.图4是根据本公开的一实施例的一种用于一增强现实场景的方法的一流程图。
15.图5是根据本公开的一实施例的一种用于一增强现实场景的方法的一流程图。
16.图6是根据本公开的一实施例的一体素网格的一示意图。
17.图7是根据本公开的一实施例的一种用于一增强现实场景的装置的一框图。
18.图8是根据本公开的一实施例的一种用于一增强现实场景的装置的一框图。
具体实施方式
19.本公开的诸多实施例将被详细描述并且诸多实施例的诸多示例在附图中被图解说明。在整个描述中,相同或相似的元件及具有相同或相似功能的元件以同样的附图标记被标示。在以参考诸多附图被描述的诸多实施例是解释性的,其用于解释本公开。所述诸多实施例不被解释为限制本公开的诸多实施例。
20.在诸多ar应用中,真实世界静态场景的几何信息可能会被提前扫描及存储。所述被扫描的几何信息可以由一隐式数据结构(an implicit data structure)中的数据表示。可以对所述隐式数据结构中的数据执行诸多算法以将所述隐式数据结构中的数据转换为一显式数据结构(an explicit data structure)中的数据。可以基于所述显式数据结构中的数据进行对象分割以获得诸多被分割的对象。可以对所述诸多被分割的对象进行物理仿真,诸如变形仿真,例如,布料变形或柔软主体变形。
21.然而,当一个对象包含大量几何细节时,诸如仿真一雕塑对象的所述变形,或者仿真一墙体作为一块织物的所述变形,对整个对象的物理仿真是非常耗时的。此外,不排除在所述ar场景中同时仿真及扫描的情况。此外,所述物理仿真需要在扫描每一帧后在所述显式数据结构中生成新数据,这将增加每帧的处理时间,导致具备复杂几何信息的诸多对象的缓慢仿真更新。
22.本公开的目的在于提供一种用于一增强现实场景的方法,针对现有技术的所述对象的变形仿真耗时且仿真速度缓慢的技术问题。
23.以此方法,当检测到所述虚拟对象与真实场景发生碰撞时(即,一用户将所述虚拟对象放置到所述增强现实场景中,诸如将一虚拟的人或一虚拟的球拖曳到所述增强现实场景中,或者控制所述增强现实场景中的所述虚拟对象与所述增强现实场景进行交互,诸如由所述用户拍打虚拟的球),提取所述场景中的当前碰撞对应的一感兴趣区域(roi)。若有一组全局区域(a set of global regions)可以针对一组碰撞(a set of collisions)而被获取,则当所述roi与一个或多个现有全局区域重叠时,将所述roi与所述现有全局区域结合。当所述roi与每个现有全局区域之间没有重叠时,所述roi将被视为一新的全局区域。此外,若没有全局区域,则所述roi将被视为一新的全局区域。最后,基于所述诸多全局区域以仿真所述诸多碰撞对应的变形,以生成一变形仿真结果。使用基于所述诸多全局区域的
碰撞穿透距离可以仿真驱动所述变形的外力,以实现对所述诸多全局区域的变形仿真。从而,可以对所述诸多全局区域而不是所述场景的所有对象及所有数据结构计算变形仿真,从而所述仿真速度被大幅提高。
24.图1为根据本公开的一实施例的一种用于一增强现实场景的方法的一流程图。
25.本公开的诸多实施例提供一种用于一增强现实场景的装置,以实现所述用于一增强现实场景的方法。所述装置可以应用于任何电子装置,使得所述电子装置可以进行上述仿真所述增强现实场景内的所述变形的功能。所述电子装置例如可以是具有各种操作系统、触摸屏及/或显示屏的一硬件装置,例如一手机、一平板电脑、一个人数字助理、一可穿戴设备或诸如此类。
26.如在图1被图解说明的,所述方法包括以下诸多框中的诸多动作。
27.在框101处,用于表示一真实世界场景的三维(3d)体积数据被获取。
28.用于所述真实世界场景的深度数据可以由一深度相机捕获,并且可以基于所述被捕获的深度数据获取所述3d体积数据。
29.在一实施例中,所述3d体积数据可以包括在一符号距离函数(sdf)或一截断符号距离函数(tsdf)中的一组体素(a set of voxels)。例如,若一红绿蓝深度(rgb-d)相机被利用以捕获所述场景,则所述被捕获的深度数据可以由所述sdf或tsdf中的数据来表示,以重建所述三维场景。
30.sdf是一种3d几何数据结构。所述sdf的输入是一点的一空间坐标,所述sdf的输出是一方向距离,表示从所述输入点到最近的3d几何表面的最近距离。所述sdf的想法是运用一大的体积作为要被重建的一个3维地图(或模型),并且将所述体积表达成许多小的体素。每个体素对应于所述真实世界场景中的一点。根据sdf,一个体素具有一顶点或一中心点,所述顶点或所述中心点含括(containing)相对于所述最近3d几何表面的最近欧几里得距离。tsdf是sdf的一改进版本。tsdf仅在所述几何表面附近保存(诸多)方向距离,并且在剩余区域进行截除。
31.sdf及tsdf是隐式数据结构。一种移动立方体(marching cubes)算法可以被采用于所述隐式数据结构中的数据以生成一显式三维表述式,诸如三角网格(triangular mesh)或点云(point cloud)。在所述sdf或tsdf中包含的基本单位,即所述体素,通常是一个具备度量信息的立方体(a cube with metric information)。若所述立方体包含所述被扫描的场景的所述表面的一部分,每个顶点存储一个相对于所述表面的一欧几里德距离,若所述立方体不包含所述被扫描的场景的所述表面的一部分,每个顶点被分配具备一默认的无关紧要的值。
32.在框102处,响应于对所述3d体积数据的一激活动作(activating action),从所述3d体积数据获取一当前的活动3d体积数据集合(a current set of active 3d volumetric data)。
33.在一个实施例中,所述激活动作包括:一输入装置与在所述真实世界场景中的一个或多个对象的交互,或者存在于所述真实世界场景中或被输入到所述真实世界场景中的一虚拟对象与在所述真实世界场景中的一个或多个对象的交互。
34.例如,在所述ar场景(即用于所述真实世界场景的所述3d重建静态场景)中,一仿真程序(在一ar装置上)可以获取用户的输入(譬如手势选择)或一虚拟对象与所述增强现
实场景(譬如一弹跳球)的交互。具体而言,当所述用户通过所述输入装置诸如一遥控器或一手势输入一操作时,例如拖曳所述ar场景中的一对象的某一部分,则所述激活动作被检测。或者,当所述虚拟对象被放置在所述ar场景中时,所述虚拟对象与所述真实世界场景发生碰撞,所述激活动作被检测。
35.在这种情况下,进行快速碰撞检测以检测所述激活动作。所述快速碰撞检测可被进行如下。所述虚拟对象(或所述输入装置)可以由所述显式数据结构诸如三角网格或点云的数据表示。基于所述显式数据结构的数据,包含所述虚拟对象的所述显式数据结构的数据的一边界框(a bounding box)可以被获取,所述边界框可以由对应的3d体积数据表示。所述碰撞检测可以通过查询用于表示所述真实世界场景的所述3d体积数据中的所述边界框被实现。响应于所述边界框在用于表示所述真实世界场景的所述3d体积数据中被查询,所述激活动作被检测。
36.所述当前的活动3d体积数据集合可能对应于所述ar场景中的所述roi。
37.在框103处,基于所述当前的活动3d体积数据集合更新多个活动3d体积数据集合。所述多个活动3d体积数据集合从3d体积数据被获取。
38.在框104处,基于所述多个被更新的活动3d体积数据集合构建一表面。
39.在一实施例中,可以对所述多个被更新的活动3d体积数据集合执行一marching cubes算法以构建所述表面。所述被构建的表面可以由一表面网格或一表面点云表示,在此不被限定。
40.在框105处,基于所述表面仿真所述真实世界场景的一部分的一变形。所述真实世界场景的所述部分对应于所述多个被更新的活动3d体积数据集合。
41.以所述方法,所述活动3d体积数据被利用以构建所述表面,而非所有3d体积数据,并且基于所述被构建的表面仿真所述真实世界场景的所述部分对应的所述变形。从而,大幅提高所述仿真的速度。
42.在一实施例中,所述多个活动3d体积数据集合是空的。在这种情况下,所述当前的3d体积数据集合可以直接被利用以构建所述表面。
43.在一实施例中,所述多个活动3d体积数据集合不是空的。也就是说,在所述场景中可能存在一组全局区域,这些全局区域可以针对一组碰撞而被获取。在这种情况下,一实施例可以被图解说明在图2中。
44.如在图2被图解说明的,所述方法包括以下诸多框中的诸多动作。
45.在框201处,用于表示一真实世界场景的3d体积数据被获取。
46.在框202处,响应于对所述3d体积数据的一激活动作,从所述3d体积数据获取一当前的活动3d体积数据集合。
47.在框203处,确定所述当前的活动3d体积数据集合与所述多个活动3d体积数据集合中的每个活动3d体积数据集合是否有重叠。
48.在框204处,响应于所述当前的活动3d体积数据集合与所述多个活动3d体积数据集合中的一个或多个活动3d体积数据集合有重叠,将所述当前的活动3d体积数据集合与所述一个或多个活动3d体积数据集合结合,以形成所述多个活动3d体积数据集合中的一个新的活动3d体积数据集合。
49.在框205处,响应于所述当前的活动3d体积数据集合与所述多个活动3d体积数据
集合中的每个活动3d体积数据集合没有重叠,将所述当前的活动3d体积数据集合插入到所述多个活动3d体积数据集合中。
50.若在所述场景中检测到多个碰撞,则需要对所述多个碰撞对应的所述多个区域进行合并。若在一当前碰撞对应的所述roi与所述多个现有全局区域中的一者之间存在重叠,则将所述roi与所述现有全局区域结合。若在所述roi与每个所述现有全局区域之间没有重叠,则所述roi将被视为一新区域,并且被添加到所述多个全局区域中。
51.例如,由于所述用户的手势操作,在一墙体上有3个区域需要变形。若所述用户的新手势操作被输入,则在所述场景中的所述新区域变成一roi。若所述roi与3个区域中的一者重叠,则所述被重叠的区域可能与所述roi结合以形成一新区域,因此需要对3个新区域进行变形。若所述roi与所述3个区域中的每一者非重叠,则将所述roi视为一新区域,以获取4个要被变形的区域。
52.在框206处,基于所述多个被更新的活动3d体积数据集合构建一表面。
53.在框207处,基于所述表面仿真所述真实世界场景的一部分的一变形。所述真实世界场景的所述部分对应于所述多个被更新的活动3d体积数据集合。
54.以所述方法,基于所述重叠以更新所述多个活动3d体积数据集合,因而进一步提高所述仿真速度。
55.此外,所述变形被仿真以生成一变形结果,并且基于所述变形仿真结果,所述增强现实场景将被着色与被渲染。在本公开的所述诸多实施例中,在所述变形仿真结果被获取后,所述变形仿真结果可以在一着色器(shader)中被渲染为纹理映射(texture mapping),即,所述变形仿真结果由所述着色器添加到当前的ar显示器中。
56.作为一种可能的实现方式,当所述虚拟对象与所述真实场景碰撞时,确定所有的碰撞体素,并且基于所有的碰撞体素生成一边界框。最小的边界框被用于作为所述roi。下面结合图3中的实施例对上述过程进行详细说明。
57.图3是根据本公开的一实施例的一种用于一增强现实场景的方法的一流程图。
58.如在图3被图解说明的,所述方法包括以下诸多框中的诸多动作。
59.在框301处,用于表示一真实世界场景的3d体积数据被获取。
60.在框302处,响应于对所述3d体积数据的一激活动作,从所述3d体积数据获取一当前的活动3d体积数据集合。
61.在框303处,基于所述当前的活动3d体积数据集合更新多个活动3d体积数据集合。所述多个活动3d体积数据集合从所述3d体积数据被获取。
62.在框304处,用于包围所述多个被更新的活动3d体积数据集合中的每个集合的多个体素的一边界框被生成。
63.作为一种可能的实现方案,当所述被碰撞的虚拟对象的物理弹性不同时,所述被生成的边界框可能不同。例如,当所述虚拟对象的物理弹性是强的时,所述边界框可能较大,而当所述虚拟对象的物理弹性是弱的时,所述边界框可能较小。因此,在本公开中,可以先获取或定义所述虚拟对象的材质属性,然后基于所述材质属性获取所述虚拟对象的所述弹性系数k。然后基于所述多个碰撞体素及所述弹性系数生成所述边界框。以此方式,可以基于所述多个碰撞体素确定一初始边界框,并且将所述初始边界框的半径乘以所述系数k,以得到所述被生成的边界框。k大于1且受控于所述虚拟对象的诸多仿真参数(譬如所述虚
拟对象的所述弹性系数)。所述虚拟对象的所述诸多仿真参数可以由所述用户设定,也可以默认设定。所述物理弹性越强,所述k越大。
64.在框305处,对所述边界框执行一移动立方体(marching cubes)算法以构建所述表面。
65.在框306处,基于所述表面仿真所述真实世界场景的一部分的一变形。所述真实世界场景的所述部分对应于所述多个被更新的活动3d体积数据集合。
66.作为一种可能的实现方式,下面结合图4中的实施例对诸多步骤105、207及306中的动作进行详细说明。
67.图4是根据本公开的一实施例的一种用于增强现实场景的方法的一流程图。
68.在框401处,所述表面的多个体素网格被获取。
69.在框402处,所述多个体素网格的多个边界顶点被获取。
70.在本公开的所述诸多实施例中,所述活动3d体积数据可以被处理以快速生成所述多个体素网格。例如,在进行快速网格化(fast meshing)时,通过marching cubes算法对所述更新的活动3d体积数据进行处理,以快速生成多个三角网格,或者通过其他方法生成诸多体素网格诸如诸多四面体网格,然后使用有限元素分析以实现更准确的物理仿真,在此不受限定。平常,所述活动3d体积数据小于整个场景,因此诸多体素网格的生成速度很快。然后所述多个体素网格的所述多个边界顶点被获取。
71.在步骤403,以所述多个边界顶点为多个锚点(anchor points)仿真所述真实世界场景的所述部分的所述变形,以生成一变形仿真结果。
72.例如,参考图5,所述被生成的体素网格可以被加入一区域网格集合(a regional mesh set),在当前迭代过程中将所述区域网格集合输入物理仿真引擎,以计算所述变形仿真结果。所述诸多体素网格的所述诸多边界顶点可以作为诸多锚点存在。在所述物理仿真诸如变形中,这些边界顶点保持不变。例如,参考图6,边界顶点1作为所述锚点,所述位置维持不变,非边界顶点2参与所述物理仿真。
73.在所述物理仿真引擎中,若所述当前体素网格在上一步骤中没有改变,则输入先前的仿真结果、所述用户定义的约束(譬如拖曳点)、所述交互的外力(譬如碰撞、重力)。若所述当前体素网格被处理及被结合,即,多个区域已经结合,则将用户定义的约束、交互的外力以及先前步骤中的所有所述被结合的区域的所述体素网格的所述仿真结果被当作所述初始值而被输入。也就是说,在本公开中,所述变形仿真结果是通过所述交互及所述外力生成的诸多约束被计算的。
74.需要说明的是,在本公开中,快速网格化适用于变形仿真。在诸多实际应用中,快速网格化也可以被用于其他物理仿真,诸如触觉仿真。当所述用户通过一触觉器件(例如手套)触摸或与一虚拟对象交互时,可以快速生成一网格及一法线,并且可以计算触觉力反馈。
75.当前,3d体积数据被用于重建诸多3d场景并且实时创建诸多三角网格以进行3d渲染。详细来说,一选择性的网格表面可被用于再生,环境由多个子集合表示,只有当所述子集合的距离函数变化超过一定阈值时,才会重新生成一网格,以便减少生成每个帧的所述网格的开销。对于所述3d重建过程中的3d渲染,生成所述网格的每帧的一选择性更新,以加速所述网格再生。
76.然而,参考图5,本公开用于所述被变形的对象的快速仿真,快速网格生成用于仿真感兴趣区域(roi),而不是所述3d重建过程中的变化区域。详细地,在本公开中,在所述用户的输入/诸多虚拟对象与所述tsdf之间的交互所生成的所述roi被提取,即基于所述tsdf快速获取所述交互的roi。所述roi被视为要被变形的新仿真区域,并且与当前区域集合结合。对所述更新的区域集合进行快速网格化,所述体素网格被用于变形仿真。所述变形仿真结果是通过所述交互及所述外力生成的诸多约束被计算的。因此,整个仿真过程可以对于体素网格的再生节省大量时间。微小变形的假设使得局部仿真的结果接近于整个对象及场景仿真的效果,适用于使用tsdf数据结构的小变形的快速仿真。
77.本公开的实施例的所述用于一增强现实场景的方法,通过在所述更新的区域集合中进行快速网格化及使用体素网格进行变形仿真,可以节省大量用于体素网格再生的时间。
78.为了实现上述实施例,本公开还提供一种用于一增强现实场景的装置。
79.图7是根据本公开的一实施例的一种用于一增强现实场景的装置的一框图。如在图7被图解说明的,所述装置包括:一第一获取模块(first acquisition module)110、一第二获取模块(second acquisition module)120、一更新模块(updating module)130、一构建模块(construction module)140、一仿真模块(simulating module)150。
80.所述第一获取模块110被配置为获取用于表示一真实世界场景的3d体积数据。所述第二获取模块120被配置为响应于对所述3d体积数据的一激活动作从所述3d体积数据获取一当前的活动3d体积数据集合。所述更新模块130被配置为基于所述当前的活动3d体积数据集合更新多个活动3d体积数据集合。所述多个活动3d体积数据集合从所述3d体积数据被获取。所述构建模块140被配置为基于所述多个被更新的活动3d体积数据集合构建一表面。所述仿真模块150被配置为基于所述表面仿真所述真实世界场景的一部分的一变形,所述真实世界场景的所述部分对应于所述多个被更新的活动3d体积数据集合。
81.在一实施例中,所述激活动作包括:一输入装置与在所述真实世界场景中的一个或多个对象的交互,或者存在于所述真实世界场景中或被输入到所述真实世界场景中的一虚拟对象与在所述真实世界场景中的一个或多个对象的交互。
82.在一实施例中,所述更新模块130被配置为:确定所述当前的活动3d体积数据集合与所述多个活动3d体积数据集合中的每个活动3d体积数据集合是否有重叠;响应于所述当前的活动3d体积数据集合与多个活动3d体积数据集合中的一个或多个活动3d体积数据集合有重叠,将所述当前的活动3d体积数据集合与所述一个或多个活动3d体积数据集合结合,以形成所述多个活动3d体积数据集合中的一个新的活动3d体积数据集合;及响应于所述当前的活动3d体积数据集合与所述多个活动3d体积数据集合中的每个活动3d体积数据集合没有重叠,将所述当前的活动3d体积数据集合插入到所述多个活动3d体积数据集合中。
83.在一实施例中,所述构建模块140被配置为:对所述多个被更新的活动3d体积数据集合执行一移动立方体算法以构建所述表面。
84.在一实施例中,所述构建模块140被配置为:生成一边界框,所述边界框包围所述多个被更新的活动3d体积数据集合中的每个集合的多个体素;并且对所述边界框内的多个体素执行一移动立方体算法以构建所述表面。
85.在一实施例中,所述构建模块140被配置为:生成一边界框,所述边界框包围所述多个被更新的活动3d体积数据集合中的每个集合的多个体素;获取所述真实世界场景中的所述多个被更新的活动3d体积数据集合中的每个集合对应的一对象的一材料属性;基于所述材料属性获取所述对象的一弹性系数;基于所述弹性系数放大所述边界框;及对所述被放大的边界框内的多个体素执行一移动立方体算法以构建所述表面。
86.在一实施例中,所述仿真模块150被配置为:获取所述表面的多个体素网格;获取所述多个体素网格的多个边界顶点;以所述多个边界顶点为多个锚点仿真所述真实世界场景的所述部分的所述变形,以生成一变形仿真结果。
87.如图8被图解说明的,所述装置包括:一第一获取模块110、一第二获取模块120、一更新模块130、一构建模块140、一仿真模块150、一着色与渲染(coloring and rendering)模块160。
88.所述着色与渲染160被配置为将所述变形仿真结果进行着色与渲染,及将所述被着色与被渲染的变形仿真结果映射到基于所述3d体积数据被重构的一个3维模型,用于重构所述真实世界场景。
89.需要说明的是,所述诸多方法实施例的说明同样适用于所述诸多装置实施例,实现原理类似,在此不再赘述。
90.为了实现上述诸多实施例,本公开还提供一种电子装置,包括一存储器、一处理器及一计算机程序,所述计算机程序被存储在所述存储器上并且可在所述处理器上操作。当所述程序被所述处理器执行时,根据上述诸多实施例的所述方法被实现。
91.为了实现上述诸多实施例,本公开还提供一种计算机可读存储介质,其上被存储一计算机可读存储指令。所述计算机可读存储指令被配置以致使一计算机实现根据上述诸多实施例的所述方法。
92.在整个说明书中对“一实施例(an embodiment)”、“一些实施例(some embodiments)”、“一示例(an example)”、“一特定示例(a specific example)”或“一些示例(some examples)”的引用是指结合所述实施例描述的特定特征、结构、材料或特性包括在本公开的至少一个实施例或示例中。遍及本说明书的各处出现的上述短语不一定指本公开的相同实施例或示例。此外,所述诸多特定特征、结构、材料或特性可以在一个或多个实施例或示例中以任何合适的方式被组合。此外,本说明书中描述的不同实施例或示例以及不同实施例或示例的特征可以由本领域技术人员组合而不相互矛盾。
93.在流程图中被描述或在此以其他方式被描述的任何过程或方法可以理解为包括用于实现过程中的特定逻辑功能或步骤的可执行指令的一个或多个模块、分段或代码部分,以及本公开的一优选实施例的的范围包括其他实施方式,这是本领域技术人员应当理解的。
94.本文以其他方式描述或流程图所示的逻辑及/或步骤,例如用于实现逻辑功能的特定可执行指令序列表,可以具体实现在任何计算机可读介质中供指令执行使用系统、装置或设备(如基于计算机的系统、包括处理器或其他能够从指令执行系统、装置及设备获取所述指令并执行所述指令的系统),或被使用以与所述指令执行系统、装置及设备结合。至于本说明书,“所述计算机可读介质(the computer readable medium)”可以是适用于包括、存储、通信、传播或传输程序,以供所述指令执行系统、装置或设备使用或被使用以与所
述指令执行系统、装置或设备结合的任何装置。所述计算机可读介质的更具体示例包括但不限于:具有一根或多根电线的电子连接(一电子装置)、一便携式计算机外壳(一磁性装置)、一随机存取存储器(ram)、一只读存储器(rom)、一可擦除可编程只读存储器(eprom或一闪存)、一光纤装置及一便携式光盘只读存储器(cdrom)。此外,所述计算机可读介质甚至可以是一纸或能够打印程序的其他适当介质,这是因为例如所述纸或其他适当介质可被光学扫描,然后在必要时以其他适当方法进行编辑、解密或处理,从而以一电子方式获取程序,然后所述程序可被存储在所述计算机存储器中。
95.应当理解的是,本公开的各个部分可以通过硬件、软件、固件或者它们的组合被实现。在上述实施例中,多个步骤或方法可以通过被存储在所述存储器中并且由适当的指令执行系统执行的软件或固件来实现。例如,若是通过所述硬件实现,同样在另一个实施例中,这些步骤或方法可以通过本领域已知的以下技术中的一种或组合被实现:一离散逻辑电路,具有一逻辑门电路,用于实现一数据信号的一逻辑功能;一专用集成电路,具有一适当组合逻辑门电路、一可编程门阵列(pga)、一现场可编程门阵列(fpga)等。
96.本领域技术人员可以理解,上述实施例中的方法所执行的全部或部分步骤可以通过由一程序下指令的相关硬件来完成。所述程序可以被存储在一计算机可读存储介质中。当所述程序被执行时,可以完成上述实施例中的方法的一个或几个步骤的组合。
97.另外,本公开实施例中的各个功能单元可以被集成在一个处理模块中,也可以单独实体地存在,或者两个或多个单元可以被集成在一个模块中。如上所述的集成模块可以采用硬件的形式被实现,也可以采用软件功能模块的形式被实现。若所述集成模块以软件功能模块的形式被实现并且作为一单独的产品销售或使用,所述集成模块也可以被存储在一计算机可读存储介质中。
98.如上所述的存储介质可以是只读存储器、磁盘或cd等。尽管已经示出及描述诸多说明性实施例,但是本领域技术人员应当理解,上述实施例不能被解释为限制本公开,并且可以在不背离本公开的范围的情况下对所述诸多实施例进行改变、替换及修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1