用于自动地重构复合材料的加强架构的方法与流程
1.本发明的技术领域是复合材料的技术领域,并且更特别地是用于重构复合材料的加强件的架构的方法的技术领域。
2.本发明涉及一种用于重构复合材料的加强件的架构的方法,并且特别地涉及一种用于自动地重构复合材料的加强件的架构的方法。本发明还涉及使得可以实施用于重构方法的计算机程序产品和记录介质。
背景技术:
3.在复合材料领域中,通过在复合材料的体积中识别每个加强线(也称为股)来重构复合材料的加强件的架构是获得材料的实际内部几何形状的优良方式。特别地,重构每个加强线的中性纤维,即,在每个加强线的整个长度上连接重心的线,使得可以获得编织拓扑结构,以便能够例如搜索编织异常,并且重构每个加强线的包络,使得可以获得对于局部热物理和热机械特性的计算所必需的织物的形态。识别每个加强线还使得可以区分每个加强线,该每个加强线可以具有不同尺寸,即,包括不同数量的纤维。
4.然后,使得可以一旦制造出缺陷部件就检测缺陷部件,或者定量由复合材料制成的部件的磨损。
5.目前,使用层析成像的图像进行重构,在该层析成像的图像上,操作者已经手动地或者图像处理算法已经自动地识别了加强件的每股/每个线的截面的重心。
6.在这两种情况下,该操作是极其费时的,简单的leap
tm
叶片包括几千根碳线,并且因此经受许多误差,因为有时不可能(即使使用肉眼)将加强件的线彼此区分开,因为它们的密度高。
7.因此需要获得一种用于重构复合材料的加强件的架构的方法,该方法是自动的,并且具有降低的错误风险。
技术实现要素:
8.通过使得可以自动地获得一种复合材料的加强件的精确数值模型,本发明提供了对以上提及的问题的解决方案。
9.本发明的第一方面涉及一种用于沿着加强轴线,自动地重构复合材料的加强件的架构的方法,该加强件包括沿着加强轴线布置的多个加强线,该方法包括以下步骤:
[0010]-获取复合材料的加强件的多个图像,沿着平行于所获取的其他图像的截面,并且不与所获取的其他图像的截面混淆的截面,获取每个图像,所获取的每个图像与垂直于截面的加强轴线上的位置相关联;
[0011]-对于所获取的每个图像,使用用第一训练数据库训练的第一人工神经网络,检测存在于所获取的图像中的加强线的每个截面的重心和/或使用用第二训练数据库训练的第二人工神经网络,检测存在于所获取的图像中的每个加强线的截面的圆周;
[0012]-对于从所获取的图像中选择的至少一个所获取的图像,称为所获取的参考图像,
为所获取的参考图像中的每个检测到的重心或每个检测到的圆周分配对应于加强线的标签;
[0013]-对于没有被选择作为所获取的参考图像的所获取的每个图像,为所获取的图像中的每个检测到的重心和/或每个检测到的圆周,分配所获取的参考图像中的对应重心或对应圆周的标签;
[0014]-从每个检测到的重心和/或从每个检测到的圆周,重构沿着加强轴线布置的每个加强线的架构,每个检测到的重心和/或每个检测到的圆周具有加强线的标签以及与所获取的图像相关联的加强轴线上的位置,在所获取的图像上已经检测到重心和/或圆周。
[0015]
由于本发明,第一人工神经网络使得可以自动地检测存在于所获取的图像中的加强线的每个截面的重心,和/或第二人工神经网络使得可以自动地检测存在于所获取的图像中的加强线的每个截面的圆周。标签使得可以将每个检测到的重心和/或每个检测到的圆周连接到加强线,以便能够自动地重构其轨迹和/或其包络。
[0016]
通过将加强线的重构的轨迹与部件的编织模式中的相应的轨迹进行比较,一旦制造部件就可以检测存在于部件的加强件中的编织异常。因此,此操作允许织物的拓扑结构的自动提取,并且因此将其与目标拓扑结构进行比较。
[0017]
加强线的包络的形状使得其可以具有对于其机械特性的评估必需的局部几何学信息。实际上,已知构成线的纤维的数量和线的体积,可以确定其局部地包含的纤维的体积比率,直接影响其热机械特性。因此,如果由经受不同外部应力的相同复合材料进行若干次重构,则可以根据施加到其上的外部条件,知道线经受的表面变形,并且因此提供具有数据的规律,使得可以揭示其机械行为。
[0018]
除了在前述段落中刚刚已经提及的特征之外,根据本发明的第一方面的方法可以具有单独地或以任何技术上可允许的组合考虑的以下各项中的一个或多个附加的特征。
[0019]
根据替代性实施方式,第一人工神经网络和/或第二人工神经网络是多层感知器或卷积人工神经网络。
[0020]
根据与前述替代性实施方式兼容的替代性实施方式,第一和第二训练数据库各自包括至少一个复合训练材料的多个图像,沿着垂直于复合训练材料的加强轴线的截面,获取每个图像。
[0021]
因此,在与所获取的图像类似的图像上训练第一和第二人工神经网络,在所获取的图像上它第一和第二人工神经网络执行它们的检测。
[0022]
根据与前述替代性实施方式兼容的替代性实施方式,使用聚类算法进行分配的步骤。
[0023]
根据与前述替代性实施方式兼容的替代性实施方式,通过具有高于阈值的分辨率的3d成像系统获取图像。
[0024]
根据前述替代性实施方式的子替代性实施方式,阈值对于用于重心检测所获取的图像是150μm,或者对于用于圆周检测所获取的图像是40μm。
[0025]
根据与前述子替代性实施方式兼容的前述替代性实施方式的子替代性实施方式,通过同步加速器辐射成像、通过透射电子显微术成像或通过x射线层析成像来获取图像。
[0026]
本发明的第二方面涉及用于自动地重构复合材料的加强件的架构的方法,该方法包括:
[0027]-根据本发明的第一方面,对于复合材料的每个加强轴线,用于沿着加强轴线,自动地重构复合材料的加强件的架构的方法的步骤;
[0028]-从沿着每个加强轴线的每个加强线的架构,重构复合材料的加强件的架构的步骤。
[0029]
因此,通过重构每个加强线的轨迹和/或包络,可以重构复合材料的加强件,并且因此能够获得编织拓扑结构和/或计算整个加强件上的热机械特性。
[0030]
本发明的第三方面涉及一种计算机程序产品,该计算机程序产品包括指令,当由计算机执行程序时,指令致使计算机实施根据本发明的第一方面和/或第二方面的方法的步骤。
[0031]
本发明的第四方面涉及一种可以由计算机读取的记录介质,该记录介质包括指令,当由计算机执行指令时,指令致使计算机实施根据本发明的第一方面和/或第二方面的方法的步骤。
[0032]
当阅读以下描述和查看附图时,将更好地理解本发明及其不同应用。
附图说明
[0033]
这些图是出于信息的目的而呈现的,并且决不限制本发明。
[0034]
图1示出了从x射线层析成像术的图像,复合材料的加强件的架构的三维重构。
[0035]
图2示出了在左侧的复合材料的加强件的一部分和在右侧的分离的加强线的一部分的图解表示。
[0036]
图3示出了在根据本发明的第一方面的方法的第一步骤期间,所获得的复合材料的加强件的x射线层析成像术的图像。
[0037]
图4示出了在根据本发明的第一方面的方法的第一步骤期间,所获得的复合材料的加强件的x射线层析成像术的图像,在该图像上指示在根据本发明的第一方面的方法的第二步骤期间检测到的重心。
[0038]
图5示出了在根据本发明的第一方面的方法的第一步骤期间,所获得的复合材料的加强件的x射线层析成像术的图像,在该图像上指示在根据本发明的第一方面的方法的第三步骤期间检测到的圆周。
[0039]
图6示出了根据本发明的第一方面的方法的第四步骤期间,所标签的参考图像的图解表示,以及示出了在根据本发明的第一方面的方法的第五步骤期间将分配有标签的加强线的截面的图像的图解表示。
[0040]
图7示出了在根据本发明第一方面的方法的第二步骤期间,检测到的每个重心在由加强轴线和平行于截面的轴线所限定的参考系中的位置。
[0041]
图8是框图,示出了根据本发明的第一方面的方法的步骤。
[0042]
图9是框图,示出根据本发明的第二方面的方法的步骤。
具体实施方式
[0043]
除非另外提及,在不同附图中出现的相同元件具有唯一的附图标记。
[0044]
本发明的第一方面涉及一种用于沿着加强轴线,自动地重构复合材料的加强件的架构的方法。
[0045]
复合材料是一种组件,该组件包括至少一个框架(称为加强件),该框架包括加强线(也称为股),以及粘合剂(称为基质),该粘合剂通常由塑性材料构成。
[0046]
加强线包括多个加强纤维。
[0047]
沿着至少一个轴线(称为加强轴线)布置加强线。
[0048]
加强件是例如,包括加强线的加强折叠部的叠置。
[0049]
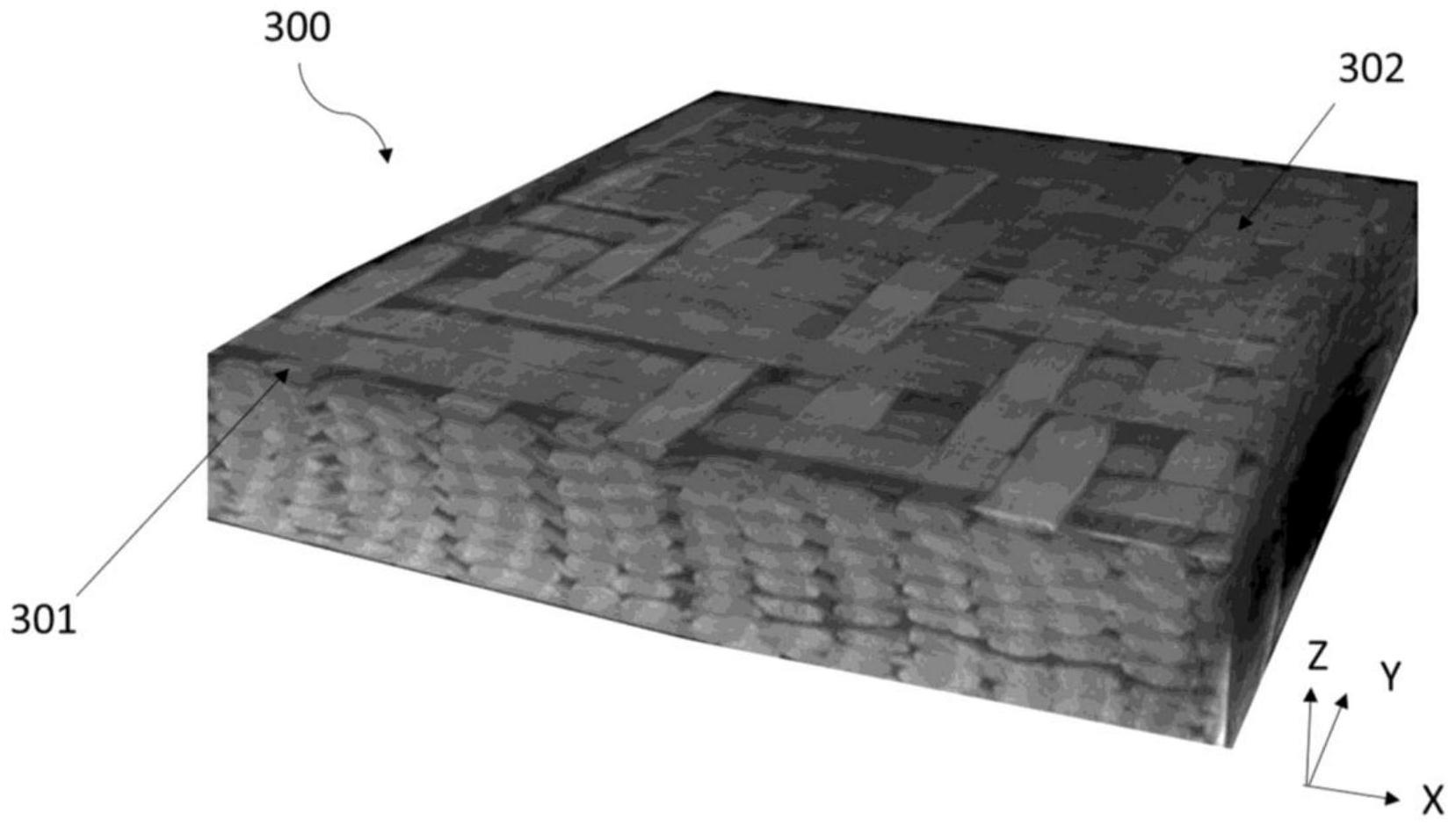
图1示出了从x射线断层成像术的图像,复合材料的加强件300的架构的三维重构。
[0050]
在图1中,上加强折叠部301由沿着轴线y布置的加强线302和由沿着轴线x布置的加强线302构成。因此,轴线x和y是图1中所示的加强件300的加强轴线。
[0051]
在图1中,加强轴线x和y基本上垂直,但是加强折叠部301可以包括沿着形成不同于90
°
的角度的加强轴线布置的加强线302。例如,加强轴线x、y可以形成45
°
的角度。
[0052]
图2示出了复合材料的加强件300的一部分的图解表示。
[0053]
在图2中,加强件300的一部分包括三个加强折叠部301-1、301-2和301-3。第一加强折叠部301-1包括四个加强线302-10、302-11、302-12、302-13,第二加强折叠部301-2包括四个加强线302-20、302-21、302-22、302-23,并且第三加强折叠部301-3包括四个加强线302-30、302-31、302-32、302-33,每个加强线302-10、302-11、302-12、302-13、302-20、302-21、302-22、302-23、302-30、302-31、302-32、302-33沿着加强轴线y布置。
[0054]
相同的加强件300的加强折叠部301可以具有不同的加强轴线x、y。例如,加强件300包括两种类型的加强折叠部301,第一类型和第二类型的加强折叠部301各自包括形成45
°
的角度的两个加强轴线x、y,并且以第一类型的加强轴线x、y与第二类型的加强轴线x、y形成45
°
的角度的方式重叠,则加强件300包括四个不同的加强轴线。
[0055]
术语“重构复合材料的加强件的架构”意指获得复合材料的加强件的架构的数值模型,然后使之可以进行复合材料的数值表征,例如,在加强件的每个点或编织异常的位置处的热物理和/或热机械特性。
[0056]
根据本发明的第一方面的方法使得可以沿着加强轴线,获得复合材料的加强件300的架构的重构,例如在图1的情况下,沿着轴线x或沿着轴线y,并且在图2的情况下,沿着轴线y。
[0057]
在本说明书的其余部分中,根据本发明的第一方面的方法应该应用于加强轴线y,即,应该沿着加强轴线y,确定复合材料的加强件300的架构。
[0058]
图8是框图,示出了根据本发明的第一方面的方法100的步骤。
[0059]
方法100的第一步骤101包括获取复合材料的加强件300的多个图像。
[0060]
例如,通过具有高于阈值的分辨率的3d成像系统(例如,同步加速器辐射成像或透射电子显微术成像系统)或通过x射线层析成像获取图像。
[0061]
沿着与加强轴线y垂直的截面,获取每个图像。
[0062]
图2示出了沿着加强轴线y布置的以及与垂直于加强轴线y的截面3031相交的分离的加强线302-22的图解表示。
[0063]
如图2所示,沿着截面3031获取的图像包括加强线302的截面。该截面可以由其重心3021和其圆周3022限定。
[0064]
例如,3d成像系统的分辨率阈值是150μm,以便能够在所获取的图像303中检测到加强线302的重心3021,以及40μm,以便能够在所获取的图像303中检测到加强线302的圆周
3022。
[0065]
图3示出了在方法100的第一步骤101期间,通过x射线断层成像术所获取的图像303。
[0066]
沿着截面3031获取图像303,该截面包括轴线x和z,并且垂直于加强轴线y。图像303包括多个加强线302的截面。
[0067]
在第一步骤101期间所获取的图像303的截面3031彼此平行并且不被混淆,即,截面3031沿着加强轴线y在它们之间被间隔开。因此,每个截面3031可以与加强轴线y上的位置相关联。
[0068]
例如,如果沿着截面3031(每个截面间隔开1mm)进行垂直于加强轴线y的三个图像303的获取,那么例如,第一图像303与加强轴线y上的位置0mm、加强轴线y上的位置1mm处的第二图像303以及加强轴线y上的位置2mm处的第三图像303相关联。
[0069]
截面3031可以或不可以沿着加强轴线y间隔开相同的距离。
[0070]
方法100的第二步骤102包括使用用第一训练数据库训练的第一人工神经网络来检测在上文所获取的每个图像303中的加强线302的每个截面的重心3021。
[0071]
人工神经网络包括至少一层人工神经元,每层包括至少一个人工神经元。人工神经网络的人工神经元通过突触连接在一起,并且给每个突触分配突触系数。
[0072]
该训练使得可以通过更新突触系数,针对预定任务,训练人工神经网络,其方式为使得由人工神经网络提供的输出数据与真实输出数据之间的误差最小化,即,人工神经网络应该提供什么作为输出,用于完成对特定输入数据的预定任务。
[0073]
因此,训练数据库包括输入数据,每个输入数据与真实输出数据相关联。
[0074]
第一人工神经网络具有用于检测存在于沿着垂直于加强轴线y的截面所获取的图像303中的加强线302的每个截面的重心3021的功能。
[0075]
因此,第一训练数据库包括相同或若干复合训练材料的图像,沿着垂直于复合训练材料的加强轴线的截面获取每个图像,以及包括关于在每个图像303中的加强线302的每个截面的重心3021的位置的数据。
[0076]
一种或多种复合训练材料可以与期望用于重构加强件300的架构的复合材料相同或不同。
[0077]
由于根据本发明的第一方面的方法100,可以在与基质组装之前,或者与基质组装之后,重构复合材料的加强件300的架构。
[0078]
因此,第一训练数据库的图像可以是在与它们基质组装之前的复合材料的加强图像300和/或在与它们的基质组装之后的复合材料的加强图像300。
[0079]
图4示出了在方法100的第一步骤101期间,通过x射线断层成像术所获取的图像303。在其中示出了加强线302的每个截面的重心3021。
[0080]
如在图3中,沿着截面3031获取图4的图像303,该截面3031包括垂直于加强轴线y的轴线x和z。
[0081]
在图像303中检测到的每个重心3021与截面3031中的位置相关联,即,在由轴线x和z限定的参考系中。
[0082]
方法100的第三步骤103包括使用用第二训练数据库训练的第二人工神经网络,以便检测在上文所获取的每个图像303中的加强线302的每个截面的圆周3022。
的每个所获取的图像303,分配存在于所获取的图像303中的每个圆周3022,在第四步骤104中已经分配了在所获取的参考图像303’中的重心3021和/或对应的圆周3022的标签。
[0098]
换言之,如果在第四步骤104期间,标签分配给了参考图像中的重心3021,则第五步骤105包括给未被选择作为所获取的参考图像303’的每个所获取的图像303,分配存在于所获取的图像303中的每个重心3021和所获取的参考图像中的对应的重心3021的标签,并且如果也进行了第三步骤103,第五步骤105包括给未被选择作为所获取的参考图像303’的每个所获取的图像303,分配存在于所获取的图像303中的每个圆周3022和所获取的参考图像中的对应的重心3021的标签。
[0099]
如果在第四步骤104期间,标签分配给了参考图像中的圆周3022,则第五步骤105包括给未被选择作为所获取的参考图像303’的每个所获取的图像303,分配存在于所获取的图像303中的每个圆周3022和所获取的参考图像中的对应的圆周3022的标签,并且如果也分配了第二步骤102,第五步骤105包括给未被选择作为所获取的参考图像303’的每个所获取的图像303,分配存在于所获取的图像303中的每个重心3021和所获取的参考图像中的对应的圆周3022的标签。
[0100]
例如,在对重心3021进行标签的情况下,如果在对其进行第四步骤104的图像303之前紧挨着的所获取的参考图像303’中,标签了六个重心3021,则所获取的图像303中检测到的六个重心3021中的每个将与所获取的参考图像303’中标签的重心3021中的一个相关联。
[0101]
在图6中,所获取的图像303包括三个重心3021,定位在左上角的第一重心3021、朝向中间右侧定位的第二重心3021以及朝向中间底部定位的第三重心3021。通过比较所获取的图像303和紧挨着的前一个所获取的参考图像303’,例如,通过选择与所获取的图像303中检测到的重心3021的位置具有最小距离的所获取的参考图像303’的重心3021对应的标签,可以将定位在左上角的重心3021与标签l1、朝向中间底部定位的重心3021与标签l3、以及朝向中间右侧定位的重心3021与标签l2相关联。
[0102]
例如,通过聚类算法(例如,dbscan算法),进行第五步骤105。
[0103]
在第五步骤105结束时,标记每个获取的图像303的重心3021和/或圆周3022。具有相同标签的重心3021和/或圆周3022对应于相同的加强线302。
[0104]
方法100的第六步骤106包括重构沿着加强轴线y布置的每个加强线302的架构。
[0105]
在进行方法100的第二步骤102的情况下,从具有加强线302的标签的每个重心3021在其截面3031中的位置,以及从与截面3031相关联和因此与其中检测到重心3021的所获取的图像303相关联的加强轴线y上的位置,进行每个加强线302的架构的重构。
[0106]
返回沿着每间隔1mm的平面,获取三个图像303的简单实施例,如果已知在沿着垂直于加强轴线y的截面3031所获取的图像303的每个中的加强线302的重心3021上的位置,则可以近似加强线302的轨迹。
[0107]
例如,如果加强线302的重心3021定位在第一图像303中由轴线x和z所限定的参考系中的坐标点(x1,z1)处,则在第二图像303中的坐标点(x2,z2)处,然后在第三图像303中的坐标点(x3,z3)处,已知加强线302具有在加强轴线y上的位置0mm处穿过点(x1,z1),在位置1mm处穿过点(x2,z2)以及在位置2mm处穿过点(x3,z3)的轨迹。
[0108]
因此,通过最小化所获取的不同图像303的截面3031之间的间隔,提高了加强线
302的轨迹的近似的精确性。
[0109]
图7示出了在由加强轴线y和平行于截面3031的轴x限定的参考系中,在方法100的第二步骤102期间,检测到的每个重心3021的位置。
[0110]
返回前述实施例,这返回到将三个重心3021放置在由轴线x和y限定的参考系中,即,根据与所获取的图像303相关联的距离,在加强轴线y上放置点x1、x2、x3。
[0111]
在图7中,对于沿着轴线x的给定值,示出了多达4个重心3021,这意指有多达四个不同的加强线302。
[0112]
通过添加关于与重心3021相关联的标签的信息,如图7所示,对于与标签l1相关联的加强线302,可以区分不同加强线302的轨迹。
[0113]
在进行方法100的第三步骤103的情况下,从具有加强线302的标签的圆周3022的每个点在其截面3031中的位置,以及从与截面3031相关联的加强轴线y上的位置和因此其中检测到重心3021的所获取图像303,进行每个加强线302的架构的重构。
[0114]
如果进行第二步骤102和第三步骤103,则可以通过增加沿着轴线x的加强线302的尺寸来补充图7。
[0115]
本发明的第二方面涉及一种用于自动地重构复合材料的加强件300的完整架构的方法。
[0116]
图9是框图,示出了根据本发明的第二方面的方法200的步骤。
[0117]
对于加强件300的每个加强轴线x、y,方法200包括根据本发明的第一方面的方法100的步骤。
[0118]
如果,如在上文所描述的实施例中,加强件300包括四个加强轴线,则对于四个加强轴线中的每一个,根据本发明的第二方面的方法包括根据本发明的第一方面的方法100的步骤。
[0119]
在图9中,进行方法100的步骤两次,这意指期望重构架构的其加强件100具有两个加强轴线x、y。
[0120]
在这些步骤结束时,每个加强线302的架构是已知的,因为沿着任一加强轴线x、y布置每个加强线302。
[0121]
然后,最后一个步骤201包括从加强件300的每个加强线302的架构,重构复合材料的加强件300的完整架构。
[0122]
例如,为了重构如图1中的加强件300的3d架构,将每个加强线302放置在由轴线x、y和z限定的参考系中是足够的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1