半实物仿真实现方法、列车牵引制动手柄的仿真实现方法与流程
1.本发明属于列车司控器仿真技术领域,尤其涉及一种半实物仿真实现方法、列车牵引制动手柄的仿真实现方法。
背景技术:
2.牵引制动手柄是司控器的重要组成部分,无级类牵引制动手柄主要应用于城轨列车,其通过输出不同电压、电流、pwm波形等形式的信号,经采集模块采集并转化后,对列车施加牵引制动百分比;同时通过手柄物理位置触发速动开关,对外发送牵引指令、制动指令、fb指令、50%牵引指令、50%制动指令、惰行指令,当进行实验室功能测试时,通常对司控器进行半实物仿真。
3.在牵引制动手柄仿真实现过程中,普遍存在以下问题:
4.(1)直接将仿真元件输出线性化的牵引制动百分比,而忽略了电压、电流或pwm波形至牵引制动百分比的转换,导致不同负载电阻下,真实司控器的输出存在波动,无法保持纯线性特性,如采用纯线性仿真,与实际牵引司控器的输出存在偏差,导致手柄位置与列车牵引力制动力不匹配,导致列车仿真测试结果精确度不足。
5.(2)牵引制动手柄的关键位置无快捷触发方式,导致在使用仿真牵引制动手柄过程中,无法准确拖动滑动块至精确位置,从而无法快速准确施加惰行、fb、bmax等指令,需重复操作,用户体验较差。
技术实现要素:
6.本发明在上述现有方法不足的基础上提供了一种半实物仿真实现方法、列车牵引制动手柄的仿真实现方法,通过多点精确测量待仿真实物元件的实测输出电压值,合理设计仿真控件取值范围,将取值范围与实测输出电压进行匹配,从而更加精确地模拟仿真实物。
7.为了实现上述目的,本发明提供了一种半实物仿真实现方法,包括:
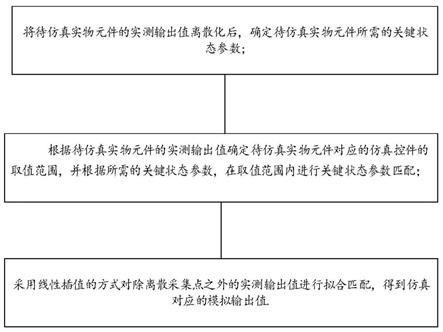
8.将待仿真实物元件的实测输出值离散化后,确定待仿真实物元件所需的关键状态参数;
9.根据待仿真实物元件的实测输出值确定待仿真实物元件对应的仿真控件的取值范围,并根据所需的关键状态参数,在取值范围内进行关键状态参数匹配;
10.采用线性插值的方式对除离散采集点之外的实测输出值进行拟合匹配,得到仿真对应的模拟输出值。
11.优选的,采用一维数组插值的方式对除离散采集点之外的实测输出值进行拟合匹配:将仿真控件值设置为x值,离散化的实测输出值设置y值,构建一维数组插值函数,元素(x)通过线性插值获取指数索引后计算输出元素(y)经插值拟合所得模拟输出。
12.优选的,从关键状态参数中设定优先关键状态参数,对优先关键状态参数设置快捷触发功能,当优先关键状态参数触发快捷触发功能时,该优先关键状态参数将赋值为预
设匹配的优先关键状态参数值,仿真控件输出预设匹配的优先关键状态参数值。
13.优选的,基于labview软件对待仿真实物元件仿真。
14.一种列车牵引制动手柄的仿真实现方法,设定牵引制动手柄为待仿真实物元件,牵引制动手柄的实测输出值为实测输出电压值,采用所述的半实物仿真实现方法,包括:
15.将待仿真牵引制动手柄的实测输出电压值离散化后,确定牵引制动手柄所需的关键状态参数,包括牵引指令、制动指令、fb紧急制动指令、50%牵引指令、50%制动指令、惰行指令、bmax制动极小位、pmax牵引极大位;
16.根据牵引制动手柄的实测输出电压值确定牵引制动手柄对应的仿真控件的取值范围,并根据所需的关键状态参数,在取值范围内进行关键状态参数匹配:将仿真控件的取值范围设置为[fb,pmax],仿真控件设置为最大值时,对应输出pmax;设置为最小值时,对应输出fb位;设置为较fb稍大时,对应输出bmax;设置为中间值时,对应输出惰行位;置于bmax与中间值之间时,对应输出制动指令;置于中间值与pmax之间时,对应输出牵引指令;置于牵引位中间值时,对应输出50%牵引位;置于制动位中间值时,对应输出50%制动位;
[0017]
采用线性插值的方式对除离散采集点之外的实测输出电压值进行拟合匹配,得到仿真对应的模拟输出电压值。
[0018]
优选的,牵引制动手柄实测输出电压与牵引制动百分比的关系式为:
[0019][0020]
其中,perc表示牵引制动百分比,vout表示实测输出电压,vref表示参考电压,牵引制动百分比与实测输出电压成正比;
[0021]
以惰行位为参考零点,取牵引位为正,制动位为负,fb表示紧急制动位,bmax对应实测输出电压极小值,表示制动极小位;pmax对应实测输出电压极大值,表示牵引极大位;
[0022]
将惰行位至pmax范围离散为n等份,将惰行位至bmax范围离散为m等份,将牵引制动手柄实测输出电压离散化。
[0023]
优选的,将仿真控件的中间值至pmax值范围离散为n等份,fb至中间值范围离散为m等份。
[0024]
优选的,将仿真控件值设置为x值,离散化的实测输出值设置y值,构建一维数组插值控件,将仿真控件的输出连接至一维数组插值控件的“指数索引或x”,将被插值数组连接至一维数组插值控件的“数字或点的数组”,输出即为实测输出值经插值拟合所得模拟输出电压值。
[0025]
优选的,将关键状态参数中pmax、bmax、fb、惰行位设定为优先关键状态参数,利用仿真控件“值写入”属性节点对优先关键状态参数设置快捷触发键,当优先关键状态参数触发快捷触发键时,将预设匹配的优先关键状态参数值赋给仿真控件“值写入”属性节点,仿真控件输出预设匹配的优先关键状态参数值。
[0026]
优选的,通过牵引制动手柄对应的仿真控件直接输出牵引制动百分比对应的模拟输出电压值、关键状态参数电气开关量。
[0027]
优选的,将仿真输出的模拟输出电压值、关键状态参数电气开关量直接转发至ccu中央控制单元,计算牵引制动百分比。
[0028]
优选的,将仿真输出的模拟输出电压值通过驱动模拟量板卡输出,将关键状态参
数电气开关量通过驱动io板卡输出,由riom网络系统信号采集模块采集并转发至ccu中央控制单元,计算牵引制动百分比。
[0029]
与现有技术相比,本发明的优点和积极效果在于:
[0030]
本发明提供了一种半实物仿真实现方法,通过多点精确测量待仿真实物元件所需的实测输出值,合理设计仿真控件取值范围,将取值范围与实测输出值进行匹配,从而更加精确地模拟仿真实物。
[0031]
同时,本发明还具体设置了牵引制动手柄的仿真实现方法,将仿真实物对象牵引制动手柄操纵角度进行精确均分,多点精确测量原司控器牵引制动手柄不同牵引位、制动位、惰行位所对应的实测输出电压,进而选取labview滑块控件设置仿真控件,合理设计仿真控制取值范围,并将取值范围与实测输出电压进行对应,将最大值匹配pmax电压,最小值匹配fb位电压,中间值匹配惰行位电压,将中间值至pmax数值区段离散均分,fb至中间值数值区段离散均分,进行一维数组插值拟合,从而使得仿真司控器牵引制动手柄更加精确地模拟实物司控器牵引制动手柄。同时,将关键状态参数中pmax、bmax、fb、惰行位增加了快捷触发方式,利用仿真控件属性节点中的“值写入”功能,一旦触发快捷方式,将修改为预选设定匹配的pmax、bmax、fb、惰行位等信息,经公式节点后输出相应信息,极大地方便使用者操作。同时,仿真后的模拟电压输出值可直接传送至中央控制单元ccu计算牵引制动百分比并发送至牵引、制动等系统;或者可驱动模拟量板卡,将模拟电压信号传送至网络系统信号采集模块riom,验证riom采集功能,进而由riom发送至ccu,由ccu计算牵引制动百分比并发送至牵引、制动等系统,使牵引制动百分比输出与实际司控器精确匹配,仿真司控器更加真实准确,使得ccu输出的牵引制动百分比更为精确,进而由牵引系统与制动系统计算的牵引制动力更加精确。
附图说明
[0032]
图1为半实物仿真实现方法流程图;
[0033]
图2为牵引制动手柄的仿真实现方法流程图;
[0034]
图3为牵引制动手柄仿真控件示意图;
[0035]
图4为关键状态信息输出原理图。
具体实施方式
[0036]
以下结合附图对本发明的具体实施方式进行进一步的描述。
[0037]
本发明提供了一种半实物仿真实现方法,基于labview软件对待仿真实物元件仿真,参考图1所示,具体包括:
[0038]
将待仿真实物元件的实测输出值离散化后,确定待仿真实物元件所需的关键状态参数;
[0039]
根据待仿真实物元件的实测输出值确定待仿真实物元件对应的仿真控件的取值范围,并根据所需的关键状态参数,在取值范围内进行关键状态参数匹配;
[0040]
采用线性插值的方式对除离散采集点之外的实测输出值进行拟合匹配,得到仿真对应的模拟输出值:本发明具体采用一维数组插值的方式对除离散采集点之外的实测输出值进行拟合匹配,将仿真控件值设置为x值,离散化的实测输出值设置y值,构建一维数组插
值函数,元素(x)通过线性插值获取指数索引后计算输出元素(y)经插值拟合所得模拟输出。
[0041]
然后,从关键状态参数中设定优先关键状态参数,对优先关键状态参数设置快捷触发功能,当优先关键状态参数触发快捷触发功能时,该优先关键状态参数将赋值为预设匹配的优先关键状态参数值,仿真控件输出预设匹配的优先关键状态参数值。
[0042]
本发明提供的半实物仿真实现方法,通过多点精确测量待仿真实物元件所需的实测输出值,合理设计仿真控件取值范围,将取值范围与实测输出值进行匹配,从而更加精确地模拟仿真实物。
[0043]
下面以列车司控器的牵引制动手柄仿真为例,详细介绍列车牵引制动手柄的仿真实现方法,由于牵引制动手柄实测输出电压与牵引制动百分比的关系式为:其中,perc表示牵引制动百分比,vout表示实测输出电压,vref表示参考电压,牵引制动百分比与实测输出电压成正比。因此,本实施例中设定牵引制动手柄的实测输出值为实测输出电压值,如图2所示,具体仿真实现方法为:
[0044]
(1)以惰行位为参考零点,取牵引位为正,制动位为负,fb表示紧急制动位,bmax对应实测输出电压极小值,表示制动极小位;pmax对应实测输出电压极大值,表示牵引极大位;将惰行位至pmax范围离散为n等份,将惰行位至bmax范围离散为m等份,将牵引制动手柄实测输出电压离散化,本实施例中n与m的数值可以设置为相同值也可以设置为不同值,理论上,离散采集点越密集,拟合效果越精确。将牵引制动手柄的实测输出电压值离散化后,将牵引指令、制动指令、fb紧急制动指令、50%牵引指令、50%制动指令、惰行指令、bmax制动极小位、pmax牵引极大位确定为待仿真牵引制动手柄所需的关键状态参数。
[0045]
(2)选取labview自带滑块控件设置牵引制动手柄对应的仿真控件,如图3所示,根据牵引制动手柄的实测输出电压值及牵引制动手柄所需的关键状态参数,确定仿真控件的取值范围设置为[fb,pmax],并将牵引制动手柄对应的仿真控件进行关键状态参数匹配,即:利用labview公式节点,当仿真控件设置为最大值时,对应输出pmax;设置为最小值时,对应输出fb位;设置为较fb稍大时,对应输出bmax;设置为中间值时,对应输出惰行位;置于bmax与中间值之间时,对应输出制动指令;置于中间值与pmax之间时,对应输出牵引指令;置于牵引位中间值时,对应输出50%牵引位;置于制动位中间值时,对应输出50%制动位。
[0046]
同时,如图4所示,本实施例中还可以将关键状态参数中pmax、bmax、fb、惰行位设定为优先关键状态参数,利用仿真控件“值写入”属性节点对优先关键状态参数设置快捷触发键,当优先关键状态参数触发快捷触发键时,将预设匹配的优先关键状态参数值赋给仿真控件“值写入”属性节点,仿真控件输出预设匹配的优先关键状态参数值。对于50%牵引与50%制动只有在紧急牵引下才会触发,因此使用频率较低,不需要单独设计快捷触发。
[0047]
(3)然后,将仿真控件的中间值至pmax值范围离散为n等份,fb至中间值范围离散为m等份,将仿真控件值设置为x值,离散化的实测输出值设置y值,新建簇,并在簇内放置两个数值输入控件,然后建立一维数组,将已建好的簇放置于数组内,扩展数组大小,将x值输入至每个簇内的第一个元素,将y值输入至每个簇内的第二个元素,构建一维数组插值控件,对除离散采集点之外的实测输出电压值进行拟合匹配,将仿真控件的输出连接至一维数组插值控件的“指数索引或x”,将被插值数组连接至一维数组插值控件的“数字或点的数
组”,输出即为实测输出值经插值拟合所得模拟输出电压值。
[0048]
(4)通过牵引制动手柄对应的仿真控件可直接输出牵引制动百分比对应的模拟输出电压值、关键状态参数电气开关量。本实施例中将仿真输出的模拟输出电压值、关键状态参数电气开关量直接转发至ccu中央控制单元,计算牵引制动百分比;或者将仿真输出的模拟输出电压值通过驱动模拟量板卡输出,将关键状态参数电气开关量通过驱动io板卡输出,由riom网络系统信号采集模块采集并转发至ccu中央控制单元,计算牵引制动百分比。
[0049]
因此,本实施例中通过将仿真实物对象牵引制动手柄操纵角度进行精确均分,多点精确测量原司控器牵引制动手柄不同牵引位、制动位、惰行位所对应的实测输出电压,进而选取labview滑块控件设置仿真控件,合理设计仿真控制取值范围,并将取值范围与实测输出电压进行对应,将最大值匹配pmax电压,最小值匹配fb位电压,中间值匹配惰行位电压,将中间值至pmax数值区段离散均分,fb至中间值数值区段离散均分,进行一维数组插值拟合,从而使得仿真司控器牵引制动手柄更加精确地模拟实物司控器牵引制动手柄。同时,将关键信息pmax、bmax、fb、惰行位增加了快捷触发方式,利用仿真控件属性节点中的“值写入”功能,一旦触发快捷方式,将修改为预选设定匹配的pmax、bmax、fb、惰行位等信息,经公式节点后输出相应信息,极大地方便使用者操作。
[0050]
综上,采用本发明仿真实现方法设置的仿真司控器可模拟电压输出值,将模拟输出电压值直接传送至ccu中央控制单元,由ccu计算牵引制动百分比并发送至牵引、制动等系统。同时可驱动模拟量板卡,将电压信号传送至网络系统信号采集模块riom,验证riom采集功能,进而由riom发送至ccu,由ccu计算牵引制动百分比并发送至牵引、制动等系统。仿真司控器牵引制动百分比输出与实际司控器精确匹配,使得仿真司控器更加真实准确,使得ccu输出的牵引制动百分比更为精确,进而由牵引系统与制动系统计算的牵引制动力更加精确。
[0051]
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1