一种高超声速飞行器气动参数在线辨识方法与流程
1.本发明属于参数辨识技术领域,具体涉及一种高超声速飞行器气动参数在线辨识方法。
背景技术:
2.相较于传统运载器,高超声速飞行器面临复杂的环境特性,稀薄气体效应、高温气体效应以及流动转捩等机理尚未完全掌握,气动不确定性强。高超声速飞行时周围空气静温被激波加热到数千度,高温下空气分子将产生振动激发、离解、甚至电离,使普通空气成为包含热化学反应的复杂流体介质,空气的热力学特性改变,会导致飞行器表面压力分布不确定性变强,飞行器所受气动力矩发生剧烈变化;另一方面,高空飞行时存在稀薄流动问题,在局部位置引起速度滑移与温度梯度跳跃,导致升阻特性、力矩特性发生改变。此外,姿态和高度的变化将显著影响飞行器发生转捩的位置,从而影响飞行器表面压力分布,进一步增加了复杂流动环境下的气动特性数据准确获取难度。
3.由于高超声速流动力学场理论发展尚不完备,工程计算方法难以获得准确的气动特性数据;而受风洞规模、风洞尖刺、风洞壁效应等影响,风洞试验也难以复现高超声速飞行器的飞行环境以及覆盖其全部飞行状态,基于风洞试验/工程计算等方法得到的高超声速飞行器气动模型往往具有一定偏差,因此需要基于飞行试验数据进行气动数据库更新和气动模型修正。然而,当高超声速飞行器以高超声速飞行时,目前的热防护技术不能保证在给定飞行状态下维持充足时间飞行,且试验代价高昂,几乎难以覆盖所有飞行状态。因此,通过离线建模+模型修正方法所得气动模型存在一定偏差和不确定性,且难以体现气动的非定常特性。考虑到高超声速飞行器气动的非定常特性和不确定性时间依赖性强,均体现在一定时间内的飞行数据中,具有小样本数据特性,可寻求智能化手段,进行非定常强耦合气动参数在线辨识技术研究,基于小样本实时飞行数据进行支持向量机在线气动建模,再基于数值微分方法,快速、实时获得准确的高超声速飞行器气动特性,解决其气动特性难以准确描述的问题。
技术实现要素:
4.本发明的目的是提供一种高超声速飞行器气动参数智能在线辨识方法,该方法解决了解决高超声速飞行器气动特性难以准确描述的问题,该方法基于实时飞行数据,有针对性地采用支持向量机进行气动在线建模,由于不同飞行数据分布区间差异较大,首先对飞行数据进行预处理,其次选择训练样本数目以及模型参数,完成支持向量机进行气动在线建模后,基于所得气动模型,利用数值差分方法进行气动参数在线辨识,从而完成气动参数在线辨识。
5.一种高超声速飞行器气动参数智能在线辨识方法,包括如下步骤:
6.步骤1、获得包括攻角α、舵偏角δ
e
、俯仰通道角速率ω
z
、马赫数ma、升力系数c
d
、阻力系数c
l
以及俯仰力矩系数c
m
的实时飞行数据;
7.确定以下三个气动系数的支持向量机回归气动模型,即:
8.c
d
=f
d
(α,δ
e
,ma)
9.c
l
=f
l
(α,δ
e
,ma)
10.c
m
=f
m
(α,δ
e
,w
z
,ma)
11.其中,c
d
表示升力系数、c
l
表示阻力系数、c
m
表示俯仰力矩系数;
12.步骤2、对步骤1获得的飞行数据在各个采样点上的取值进行归一化处理;
13.步骤3、确定选择的采样点的数目n
c
;
14.步骤4、根据步骤3确定的数目n
c
,在步骤2归一化处理后的数据中选择数据,然后分别得到升力系数c
d
、阻力系数c
l
以及俯仰力矩系数c
m
各自对应的均值y
mean
和标准差σ
y
,以及噪声的标准差σ,从而确定支持向量机回归气动模型的超参数ε:
[0015][0016]
和惩罚因子:
[0017]
c=max(|y
mean
+3σ
y
|,|y
mean
‑
3σ
y
|)
[0018]
步骤5、根据三个支持向量机回归气动模型,从而求取稳定性和操纵性气动导数,具体为:
[0019]
步骤51、选择一个输入变量,为其增加一个扰动量,并保持其他输入变量不变;
[0020]
步骤52、对应的气动系数的导数等于支持向量机气动模型输出的变化量与输入变量扰动量之比;
[0021]
步骤53、针对同一个气动系数的导数,在每一个样本点上执行步骤51和步骤52;
[0022]
步骤54、则待求气动系数的导数等于各个样本点上所得导数的平均值。
[0023]
较佳的,所述步骤3中样本数目n
c
:
[0024]
n
c
=40d
in
(1+τσ)
ꢀꢀꢀ
(7)
[0025]
其中,d
in
表示模型输入维数,τ表示噪声水平。
[0026]
较佳的,所述步骤4中,噪声的标准差σ的公式为:其中d为多项式回归等高复杂度回归估计器的自由度。
[0027]
较佳的,每接收一个采样点数据,则计算一次标准差σ;当第三次计算标准差时,将之前所有的标准差的平均值作为本次求取的标准差σ。
[0028]
较佳的,所述步骤2中,所述归一化处理采用最大值—最小值归一化方式。
[0029]
较佳的,所述步骤54中,阻力系数c
l
对攻角α的导数为
[0030]
其中,和分别是α
i
和δ
ei
的归一化值,是δα的归一化值。
[0031]
较佳的,设为空速在弹体系下的分量,则飞行器的攻角α、侧滑角β以及飞行速度通过如下方式给出:
[0032][0033]
较佳的,升力系数c
d
、阻力系数c
l
、俯仰力矩系数c
m
通过如下简化的关系式得出:
[0034]
c
d
=
‑
c
x
cos(α)
‑
c
z
sin(α)
[0035]
c
l
=c
x
sin(α)
‑
c
z
cos(α)
[0036][0037]
其中,s表示飞行器横截面积,l为特征长度,j
z
表示飞行器的横向力矩系数,弹体系下力系数c
x
,c
z
通过下式得到:
[0038]
c
x
=mn
x
/qs
[0039]
c
z
=mn
y
/qs
[0040]
其中,m表示飞行器质量。
[0041]
本发明具有如下有益效果:
[0042]
1、本发明提出了一种基于svr的智能气动参数在线辨识方法。该方法利用svr对小样本的良好学习性能,利用svr对小样本进行智能实时气动建模。该模型具有良好的泛化能力,可用于气动预测。然后采用数值微分法从svr模型中实时提取气动参数。
[0043]
2、为保证识别精度和计算效率,提出了输入维数和噪声水平的经验公式,用于在线选择训练样本容量。针对svr模型超参数难以在线优化的问题,提出了选取模型参数的经验公式,以追求svr模型良好的泛化性能。基于训练样本噪声方差的渐近估计,在线选择svr的超参数。
[0044]
3、该方法不依赖于先验的飞行器数学模型,能在较低的时间开销下实现对气动力参数在线准确、鲁棒的估计。它不仅可以作为一种在线的方法,而且可以作为一种离线使用的方法。
附图说明
[0045]
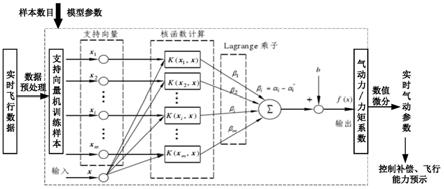
图1为本发明的基于向量机的气动参数在线辨识方法原理图。
具体实施方式
[0046]
下面结合附图并举实施例,对本发明进行详细描述。
[0047]
本发明的目的是通过以下技术方案实现的:
[0048]
为了实现气动参数在线辨识,将svr的非线性建模能力与数值微分思想相结合。首先采用svr进行气动在线建模,通过对实时飞行数据的处理获得训练样本,其次选择训练样本数目以及模型参数,利用svr在线建立气动模型。
[0049]
下面首先给出处理实时飞行数据以获得训练样本的基本过程。设待处理的飞行状态变量包括攻角α、舵偏角δ
e
、俯仰通道角速率ω
z
、弹体系轴向过载n
x
、弹体系法向过载n
y
、动压q。对于高超声速飞行器,攻角不能直接测量得到,通过速度在弹体系下的分量得到,另外,由于高超声速飞行器的飞行速度较大,可忽略风的影响,设为空速在弹体系下的
分量,则飞行器的攻角α、侧滑角β以及飞行速度可通过如下方式给出:
[0050][0051]
至于升力系数c
d
、阻力系数c
l
、俯仰力矩系数c
m
可通过如下简化的关系式得出:
[0052][0053]
其中,s表示飞行器横截面积,l为特征长度,j
z
表示飞行器的横向力矩系数俯仰通道角加速度可通过加一线性观测器观测俯仰通道角速率得到;弹体系下力系数c
x
,c
z
通过下式得到:
[0054][0055]
其中,m表示飞行器质量。
[0056]
由于不同原始数据分布的数值区间不同,在训练之前,需要对样本进行归一化,以提高训练速度和支持向量机的泛化性能。本发明中采用最大
‑
最小归一化方式,该归一化公式形式如下:
[0057][0058]
其中y表示原始数据序列,是归一化后的数据序列,up是归一化上界,low是归一化下界。本发明中归一化上下界取值分别为:low=
‑
1,up=1,即样本中的所有变量经过归一化后都置于区间[
‑
1,1]。
[0059]
再选择样本数目以及模型参数。
[0060]
①
样本数目的选择
[0061]
由于气动导数是通过在样本点输入上增加扰动得到的,支持向量机模型的泛化性能对参数辨识的精度具有较很大影响。更确切地,模型的泛化性能与噪声水平和数据稀疏度相关。
[0062]
一方面,模型的泛化性能依赖于数据的稀疏度,设数据数目一定,当输入维数增加时,可用的数据变得相对稀疏,准确和可靠的建模需要更多的训练样本。由于俯仰力矩系数建模所需的样本输入更多,因此,相对于升力系数c
l
和阻力系数c
d
建模,针对俯仰力矩系数c
m
建模,需要更多的训练样本。
[0063]
另一方面,噪声水平与模型的泛化性能相关。给定固定训练样本,假设通过训练已经获得了一个泛化性能较好的支持向量机模型。对于任意输入x处的目标真值y和目标预测值y和满足如下关系:
[0064][0065]
其中e是偏差,也可以被视为样本的噪声。假设e服从0均值、方差为σ2的高斯分布,
记为e~n(0,σ2)。
[0066]
容易得出接下来通过推导可以得到
[0067][0068]
定义如下函数
[0069][0070]
其中的分布独立于的分布。对于给定的置信度系数a,存在常值λ1和λ2使得
[0071]
p(λ1≤z≤λ2)=1
‑
a
ꢀꢀꢀ
(6)
[0072]
从上述不等式可以解得关于a的置信区间,例如,对于a=0.05,的95%置信区间为
[0073]
可以看出,σ越大,的置信区间越大。因此,预测值的不确定性增大。在实际应用中,噪声方差σ2是由训练样本拟合误差的平方和来估计的。对于小样本,方差的估计值会偏离真值。因此,为了降低样本数目少导致方差估计的风险,方差估计应该尽可能采用大样本。
[0074]
在获得准确的气动导数(辨识相对误差小于10%)的前提下,进行了大量的离线试验来寻找适合气动建模的训练样本大小,然后给出了输入维数和噪声水平的经验公式来选择样本数n
c
。
[0075]
n
c
=40d
in
(1+τσ)
ꢀꢀꢀ
(7)
[0076]
其中,d
in
表示模型输入维数,τ表示噪声水平。
[0077]
②
模型参数选择
[0078]
由支持向量机的基本理论可知,支持向量机模型的超参数c,ε决定着模型的泛化性能。
[0079]
在选择和优化方面,有很多优化方法,主要分为非智能优化方法和智能优化方法。典型的非智能方法有网格搜索方法、梯度下降算法和交叉验证方法,这些方法计算量较大,且对数据敏感。智能优化方法包括粒子群优化算法、人工蜂群算法、正弦余弦算法等。然而,目前为止还没有建立系统的超参数寻优方法。而此外,虽然已经发展出各种优化方法,但很难找到合适的方法来在线优化超参数。
[0080]
另外,飞行是一个动态过程,飞行数据的特征每时每刻都在变化。训练样本会随着时间而变化。为了适应样本的变化,需要在线调整支持向量机模型超参数。为此,可采用下列经验公式:
[0081]
c=max(|y
mean
+3σ
y
|,|y
mean
‑
3σ
y
|)
[0082][0083]
其中y
mean
和σ
y
为训练样本的目标值(y)的均值和标准差,σ为噪声的标准差,n为样本容量。应用下面的公式估计噪声的方差:
[0084][0085]
其中d为多项式回归等高复杂度回归估计器的自由度。应用上述公式进行模型参数的选择很简单,但是,从这个方法确定的c和ε并不是最优的。
[0086]
为了减少在线计算的开销,直接采用svr模型(估计器)来估计标准差,而不选择其他复杂回归估计器。在每次辨识过程中,将根据新的训练样本,通过式(9)估计σ。通过新样本所得估计值将在后续的辨识中被用于产生新的标准差的估计值,而新估计值被用于参数ε的确定,具体更新方式如下:
[0087][0088]
其中表示第(j
‑
1)次的标准差的估计值。当j增加,更多的样本被用于估计σ,使其逐渐逼近真值。
[0089]
最后基于该模型数值进行数值微分,从而求取稳定性和操纵性气动导数。以纵向通道气动参数辨识为例,介绍基于支持向量机的气动参数在线辨识方法。
[0090]
基本步骤如下:
[0091]
1.选择一个输入变量,为其增加一个小扰动,同时保持其他输入变量不变;
[0092]
2.对应的气动导数就等于模型输出的变化量与输入端扰动量之比;
[0093]
3.为保证该数值方法的鲁棒性,针对同一个气动导数,在每一个样本点上执行上述1,2步。
[0094]
4.待求气动导数等于不同样本点上所得气动导数估计值的平均值。
[0095]
实施例:
[0096]
本发明提供了一种高超声速飞行器气动参数的智能在线辨识方法。基于实时飞行数据,该方法有针对性地采用支持向量回归技术进行气动在线建模,由于不同飞行数据分布区间差异较大,首先对飞行数据进行预处理,再根据样本数据估计样本噪声水平,基于样本噪声水平选择训练样本数目以及模型参数,完成支持向量机进行气动建模。再基于所得气动模型,利用数值差分方法提取高超声速飞行器气动导数,从而完成气动参数在线辨识。下面以纵向通道气动参数辨识为例阐述该方法的具体实施方式。
[0097]
给定下列纵向实时飞行数据
[0098]
[α(i),δ
e
(i),w
z
(i),ma(i),c
d
(i),c
l
(i),c
m
(i)]i=k,k
‑
1...,k
‑1‑
n
[0099]
其中k代表当前采样时刻,n表示采样点数目。
[0100]
气动在线建模的目的是建立飞行状态量(攻角、马赫数、舵偏角、俯仰角速度)同气动力系数、力矩系数间的关系,为了提高建模精度,分别建立三个多输入单输出(miso)的支持向量机回归气动模型,即:
[0101][0102]
式中,α
i
,为权重系数,k(x
i
,x)为标准核函数,b
为偏置量,m为支持向量的个数。
[0103]
模型输入输出包括攻角α、舵偏角δ
e
、俯仰通道角速率ω
z
、马赫数ma、弹体系轴向过载n
x
、弹体系法向过载n
y
、升力系数、阻力系数、俯仰力矩系数。对于高超声速飞行器,攻角不能直接测量得到,通过速度在弹体系下的分量得到,另外,由于高超声速飞行器的飞行速度较大,可忽略风的影响,设为空速在弹体系下的分量,则攻角根据公式(1)给出。至于升力系数、阻力系数、俯仰力矩系数通过公式(2)得出:
[0104]
原始数据处理完成后,可根据式(9)
‑
(10)估计分别得到升力系数样本、阻力系数样本、俯仰力矩系数样本的样本噪声标准差σ,从而根据下列经验公式选择样本数目:
[0105]
n
c
=40d
in
(1+τσ)
[0106]
同时三个模型的相应模型参数ε也随之确定。
[0107][0108]
基于处理过的样本数据,可分别得到升力系数、阻力系数、俯仰力矩系数的均值和标准差y
mean
、σ
y
,从而可以得到惩罚因子:
[0109]
c=max(|y
mean
+3σ
y
|,|y
mean
‑
3σ
y
|)
[0110]
完成气动建模后,数值微分方法将被用于气动参数在线辨识。基本步骤如下:
[0111]
1.选择一个输入变量,为其增加一个小扰动,同时保持其他输入变量不变;
[0112]
2.对应的气动导数就等于模型输出的变化量与输入端扰动量之比;
[0113]
3.为保证该数值方法的鲁棒性,针对同一个气动导数,在每一个样本点上执行上述1,2步。
[0114]
4.待求气动导数等于不同样本点上所得气动导数估计值的平均值。
[0115]
例如,可通过下式得到升力系数对攻角的导数
[0116][0117]
其中,和分别是α
i
和δ
ei
的归一化值,是δα的归一化值。由于采用了最大值—最小值归一化方式,很容易得到上式。
[0118]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1