基于区域生长的海底地貌单元轮廓及细节识别方法
1.本发明涉及海洋测绘、大数据处理、边缘识别、区域生长等技术领域,具体涉及一种基于区域生长的海底地貌单元轮廓及细节识别方法。
背景技术:
2.海底地貌单元边缘识别是海洋开发的基础。通过识别海底地貌单元边缘,可获取海床起伏变化、海底板块运动规律等数据。这些数据能够在水下管道排布、海洋油气勘探和环境监测等海洋科学、工程中发挥重要作用。
3.通过海底地貌测量,可获取海底测量点信息,包括位置、海拔、方位等。目前,常用多波束测深系统进行测量,该系统可在航迹正交的扇面内发射上百个波束,通过检测声波往返于换能器到海底的传播时间,结合当前声速、潮位、船姿等多项参数计算水深。相较于传统的单波束回声探测技术,多波束测深系统具有精度高、覆盖面广等特点。
4.在对海底地貌进行观测时,采用位置结合水深数据绘制二维地形图,图中观测点颜色深浅变化可以直观体现地貌单元海拔变化。受地震、洋流、生物作用等多种因素影响,海底地貌单元的类型具有复杂性、多样性,包括珊瑚礁、海底峡谷、深水水道、海山、碳酸盐台地、陡崖、滑坡等,为边缘识别带来一定难度。以海底珊瑚礁为例,在边缘轮廓内还存在着大量细节,仅依靠海拔特征无法准确识别全部细节。
5.虽然目前已有一些海底地貌单元边缘的自动提取方法,但是,此类方法主要用于提取脊线、谷底线、海岸线等特定类型的边缘,难以实现海底地貌单元整体边缘或全部细节的提取。
技术实现要素:
6.本发明的目的是提取地貌单元的轮廓和细节。本发明具有方法简单、计算量小、实时性好、节约人力、易于实现等优点。适用于海底地貌单元的轮廓及细节识别。
7.本发明包括如下步骤:
8.(1)确定初始种子点:
9.输入待识别区域中各观测点的水深值h
i
、曲率值c
i
及坡度值s
i
,若满足s
i
≥s1或|c
i
|≥c1,则该i点为初始种子点,其中,s1、c1分别为用于确定初始种子点的坡度阈值和曲率阈值,根据待识别区域的坡度范围和曲率范围人工设定,i=1,2,
…
,n,n为待识别区域的观测点个数;
10.(2)基于水深值进行种子区域生长:
11.若i点为与种子点相邻的非种子点,且满足h
i
≥h2或h
i
≤h1,则该i点被标记为种子点,其中,i=1,2,
…
,n,h1<h2,h1、h2均为水深阈值,根据待识别区域的水深范围人工设定;
12.(3)基于坡度值进行种子区域生长:
13.若i点为与种子点相邻的非种子点,则以i点为中心,构造m
×
m网格,若s
i
≥s
z
,则该i点被标记为种子点,其中,s
z
为m
×
m网格中与非种子点相邻的种子点的坡度值的中位数,m
为大于1的奇数;
14.(4)种子区域的模糊处理:
15.以i点为中心,构造l
×
l网格,若i点为种子点,且满足n
p
≤p,则该i点被标记为非种子点;若i点为非种子点,且满足n
q
≤q,则该i点被标记为种子点,其中,p、q为模糊参数,人工设定,i=1,2,
…
,n,n
p
、n
q
分别为l
×
l网格中的种子点、非种子点个数,l为大于1的奇数;
16.(5)提取地貌单元的轮廓:
17.提取所有与非种子点相邻的种子点,构成地貌单元的轮廓;
18.(6)基于坡度值补充地貌单元的细节:
19.针对步骤(4)的种子点的坡度值进行中值滤波,若满足则该i点被标记为地貌细节点;提取所有与非细节点相邻的细节点,用于补充地貌单元的细节,其中,s2为用于补充细节的坡度阈值,人工设定,为中值滤波后的坡度值;
20.(7)基于曲率值补充地貌单元的细节:
21.针对步骤(4)的种子点的坡度值和曲率值,应用非极大值抑制法,得到地貌单元轮廓内的局部极值点,用于补充地貌单元的细节。
附图说明
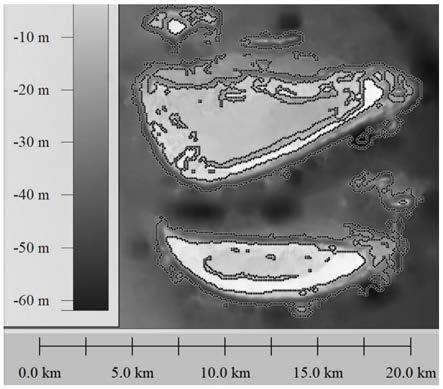
22.图1为海底珊瑚礁水深图;
23.图2为初始种子点分布图;
24.图3为基于水深值进行种子区域生长结果图;
25.图4为基于坡度值进行种子区域生长结果图;
26.图5为种子区域模糊结果图;
27.图6为地貌单元的轮廓图;
28.图7为基于坡度值补充的地貌单元的细节图;
29.图8为基于非极大值抑制补充的地貌单元的细节图。
具体实施方式
30.本实施例根据多波束测深系统采集得到的海底珊瑚礁区域的水深数据及计算得到的坡度、曲率数据,采用区域生长及非极大值抑制的方法,实现了珊瑚礁地貌单元的轮廓和细节提取。
31.具体识别步骤如下:
32.(1)确定初始种子点:
33.输入待识别区域中各观测点的水深值h
i
、曲率值c
i
及坡度值s
i
,若满足s
i
≥s1或|c
i
|≥c1,则该i点为初始种子点,其中,s1、c1分别为用于确定初始种子点的坡度阈值和曲率阈值,根据待识别区域的坡度范围和曲率范围人工设定,i=1,2,
…
,n,n为待识别区域的观测点个数。
34.在本实施例中,处理器配置为intel(r)pentium(r)cpu g4560@3.50ghz,3500mhz,具备2个内核、4个逻辑处理器,选取海底珊瑚礁区域作为地貌单元轮廓及细节提取的对象,
该数据体大小为3312kb,观测点数为103350,海底珊瑚礁区域水深变化如图1所示。当取s1=0.0444、c1=1.6602
×
10
‑4时,得到的初始种子点分布如图2所示,在matlab环境下,获取初始种子点用时1.7810s。
35.(2)基于水深值进行种子区域生长:
36.若i点为与种子点相邻的非种子点,且满足h
i
≥h2或h
i
≤h1,则该i点被标记为种子点,其中,i=1,2,
…
,n,h1<h2,h1、h2均为水深阈值,根据待识别区域的水深范围人工设定。
37.在本实施例中,当取h1=
‑
52.9140、h2=
‑
31.3040时,种子区域生长结果如图3所示。
38.(3)基于坡度值进行种子区域生长:
39.若i点为与种子点相邻的非种子点,则以i点为中心,构造m
×
m网格,若s
i
≥s
z
,则该i点被标记为种子点,其中,s
z
为m
×
m网格中与非种子点相邻的种子点的坡度值的中位数,m为大于1的奇数。
40.在本实施例中,m=5,基于坡度值进行种子区域生长结果如图4所示。
41.(4)种子区域的模糊处理:
42.以i点为中心,构造l
×
l网格,若i点为种子点,且满足n
p
≤p,则该i点被标记为非种子点;若i点为非种子点,且满足n
q
≤q,则该i点被标记为种子点,其中,p、q为模糊参数,人工设定,i=1,2,
…
,n,n
p
、n
q
分别为l
×
l网格中的种子点、非种子点个数,l为大于1的奇数。
43.在本实施例中,l=3,p=3,q=3,种子区域的模糊处理结果如图5所示。
44.(5)提取地貌单元的轮廓:
45.提取所有与非种子点相邻的种子点,构成地貌单元的轮廓。
46.在本实施例中,提取的地貌单元的轮廓如图6所示。应用matlab环境进行处理,获取轮廓用时2.436秒。
47.(6)基于坡度值补充地貌单元的细节:
48.针对步骤(4)的种子点的坡度值进行中值滤波,若满足则该i点被标记为地貌细节点;提取所有与非细节点相邻的细节点,用于补充地貌单元的细节,其中,s2为用于补充细节的坡度阈值,人工设定,为中值滤波后的坡度值;
49.在本实施例中,s2=0.0134,基于坡度值补充得到的地貌单元的细节如图7所示。应用matlab进行处理,获取地貌单元细节用时0.322秒。
50.(7)基于曲率值补充地貌单元的细节:
51.针对步骤(4)的种子点的坡度值和曲率值,应用非极大值抑制法,得到地貌单元轮廓内的局部极值点,用于补充地貌单元的细节。
52.在本实施例中,基于非极大值抑制法补充得到的地貌单元的细节,结果如图8所示。应用matlab进行计算,获得地貌单元补充细节用时0.338秒。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1