一种列车车轴镶入部位超声判伤方法及其系统与流程
1.本发明涉及轨道车辆检测技术领域,具体涉及一种列车车轴镶入部位超声判伤方法及其系统。
背景技术:
2.铁路列车车轴与车轮或制动盘的镶入部采用机械过盈配合,在役运行过程中,车轴在镶入部位由于交变应力容易产生疲劳裂纹缺陷,该裂纹一般采用超声波探伤方式进行检测。但是由于镶入部位的影响,在超声波探伤信号中,裂纹周围会产生与裂纹类似的回波噪声信号,难以对裂纹缺陷信号进行准确识别。
3.具体的,由于车轴镶入部位的疲劳裂纹缺陷信号与该部位的噪声信号位置相同,波形非常类似,不同轮对的镶入部位噪声幅值范围波动较大,有很多轮对的噪声幅值超过深度为0.5mm标定缺陷幅值,甚至部分噪声幅值超过深度为1mm标定缺陷幅值。目前列车车轴超声波闸门自动判伤,超过标定幅值的信号均会被判定为缺陷,目前的自动判伤方式多采用深度为1mm的缺陷作为标定缺陷,超过其幅值的信号被判定为缺陷,在判伤过程中常常将部分幅值较高的噪声信号判定为缺陷。导致,目前的自动判伤方式不能够有效识别幅值低于噪声的缺陷信号,仅能判定部分深度为1mm的缺陷,且存在很高的误报,误报率大多高于15%。
4.因此,传统的车轴镶入部位超声判伤方法会将车轴镶入部位附近的回波噪声信号误判定为裂缝缺陷回波进而生成列车车轴镶入部位存在缺陷的检测结果。因此,传统的车轴镶入部位超声判伤方法无法解决因车轴镶入部位附近的回波噪声信号造成系统误报的问题。
5.综上所述,现有的车轴镶入部位超声判伤方法存在检测结果可靠性低的问题。
技术实现要素:
6.有鉴于此,本发明提供一种列车车轴镶入部位超声判伤方法及其系统,通过改进超声图像的图像处理方法,解决了现有的车轴镶入部位超声判伤方法存在的检测结果可靠性低的问题。
7.为解决以上问题,本发明的技术方案为采用一种列车车轴镶入部位超声判伤方法,包括:s1:获取列车车轮镶入部位的单角度的超声b扫图像;s2:将所述超声b扫图像分解为多个不同尺度的第一图像,计算多个所述第一图像的各像素块的显著性值,并生成目标区域图像;s3:重复步骤s1
‑
s2直至生成全部角度下的多个目标区域图像,并提取多个所述目标区域图像的重合区域图像作为缺陷区域。
8.可选地,所述s2包括:s21:基于高斯金字塔将所述超声b扫图像分解为多个不同尺度的所述第一图像;s22:计算多个所述第一图像的各像素块之间的显著性差异值;s23:通过中值滤波生成多个所述第一图像的各像素块的显著性值;s24:提取多个所述第一图像中显著性值超过第一阈值的各像素块,并计算各像素块的重合区域生成显著性区域位置信
息;s25:基于所述显著性区域位置信息分割所述超声b扫图像并生成所述目标区域图像。
9.可选地,所述s24还包括:基于模糊算法降低非显著性区域位置的像素点的分辨率,实现所述超声b扫图像的弱化背景。
10.可选地,所述s1还包括:获取由列车车轮镶入部位的单角度的所述超声b扫图像后,对所述超声b扫图像进行尺寸一致化处理。
11.相应地,本发明提供,一种列车车轴镶入部位超声判伤系统,包括:超声采集单元,用于采集列车车轮镶入部位的多角度的多个超声b扫图像;数据处理单元,用于将所述超声b扫图像分解为多个不同尺度的第一图像,计算多个所述第一图像的各像素块的显著性值,生成目标区域图像,并重复计算全部角度下的所述超声b扫图像的多个目标区域图像,提取多个所述目标区域图像的重合区域图像作为缺陷区域。
12.可选地,所述数据处理单元基于高斯金字塔将所述超声b扫图像分解为多个不同尺度的所述第一图像,计算多个所述第一图像的各像素块之间的显著性差异值,通过中值滤波生成多个所述第一图像的各像素块的显著性值,提取多个所述第一图像中显著性值超过第一阈值的各像素块,并计算各像素块的重合区域生成显著性区域位置信息,基于所述显著性区域位置信息分割所述超声b扫图像并生成所述目标区域图像。
13.可选地,所述数据处理单元在生成显著性区域位置信息后,还基于模糊算法降低非显著性区域位置的像素点的分辨率,实现所述超声b扫图像的弱化背景。
14.可选地,所述超声判伤系统还包括数据存储单元,用于存储所述数据处理单元生成的所述缺陷区域信息和用于表征预标定缺陷信号的所述第一阈值。
15.本发明的首要改进之处为提供的列车车轴镶入部位超声判伤方法,通过采集列车车轮镶入部位的多角度的多个超声b扫图像,增加轮对噪声和缺陷的特征信息,以提升缺陷检测的准确性,并通过对超声b扫图像进行均值滤波图像预处理增强缺陷信息的对比度后,对超声b扫图像进行高斯金字塔的图像分解以进行显著性检测,通过不同尺度的显著性图融合成提取重合区域生成显著性区域位置信息,进一步增强目标缺陷特征并减弱背景噪声,进而提取缺出准确的缺陷区域并生成检测结果,解决了现有的车轴镶入部位超声判伤方法存在的检测结果可靠性低的问题。
附图说明
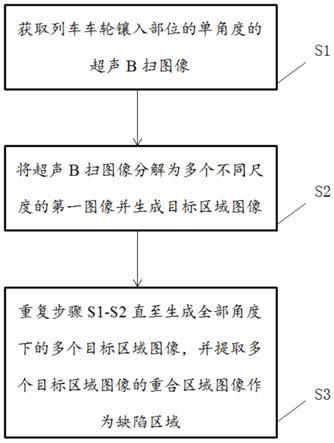
16.图1是本发明的列车车轴镶入部位超声判伤方法的简化流程图;
17.图2是本发明的列车车轴镶入部位超声判伤系统的简化模块连接图。
具体实施方式
18.为了使本领域的技术人员更好地理解本发明的技术方案,下面结合附图和具体实施例对本发明作进一步的详细说明。
19.如图1所示,一种列车车轴镶入部位超声判伤方法,包括:
20.s1:获取列车车轮镶入部位的单角度的超声b扫图像。其中,获取由列车车轮镶入部位的单角度的所述超声b扫图像后,对所述超声b扫图像进行尺寸一致化处理。
21.s2:将所述超声b扫图像分解为多个不同尺度的第一图像,计算多个所述第一图像的各像素块的显著性值,并生成目标区域图像。
22.进一步的,所述s2包括:s21:基于高斯金字塔将所述超声b扫图像分解为多个不同尺度的所述第一图像;s22:计算多个所述第一图像的各像素块之间的显著性差异值;s23:通过中值滤波生成多个所述第一图像的各像素块的显著性值;s24:提取多个所述第一图像中显著性值超过第一阈值的各像素块,并计算各像素块的重合区域生成显著性区域位置信息;s25:基于所述显著性区域位置信息分割所述超声b扫图像并生成所述目标区域图像。其中,第一阈值可以通过预采集的采集深度为0.5mm的标定缺陷信号进行标定。
23.更进一步的,所述s24还包括:基于模糊算法降低非显著性区域位置的像素点的分辨率,实现所述超声b扫图像的弱化背景。
24.更进一步的,所述s21还包括:基于高斯金字塔将所述超声b扫图像分解为多个不同尺度的所述第一图像之前,对所述超声b扫图像进行均值滤波图像预处理。
25.s3:重复步骤s1
‑
s2直至生成全部角度下的多个目标区域图像,并提取多个所述目标区域图像的重合区域图像作为缺陷区域。本发明通过上述方法可实现判定列车车轴镶入部位的深度超过0.3mm的疲劳裂纹缺陷,误报率不超过5%。
26.本发明通过采集列车车轮镶入部位的多角度的多个超声b扫图像,增加轮对噪声和缺陷的特征信息,以提升缺陷检测的准确性,并通过对超声b扫图像进行均值滤波图像预处理增强缺陷信息的对比度后,对超声b扫图像进行高斯金字塔的图像分解以进行显著性检测,通过不同尺度的显著性图融合成提取重合区域生成显著性区域位置信息,进一步增强目标缺陷特征并减弱背景噪声,进而提取缺出准确的缺陷区域并生成检测结果,解决了现有的车轴镶入部位超声判伤方法存在的检测结果可靠性低的问题。
27.相应的,本发明提供,如图2所示,一种列车车轴镶入部位超声判伤系统,包括:超声采集单元,用于采集列车车轮镶入部位的多角度的多个超声b扫图像;数据处理单元,用于将所述超声b扫图像分解为多个不同尺度的第一图像,计算多个所述第一图像的各像素块的显著性值,生成目标区域图像,并重复计算全部角度下的所述超声b扫图像的多个目标区域图像,提取多个所述目标区域图像的重合区域图像作为缺陷区域。其中,所述超声采集单元与所述数据处理单元电气连接。
28.进一步的,所述数据处理单元基于高斯金字塔将所述超声b扫图像分解为多个不同尺度的所述第一图像,计算多个所述第一图像的各像素块之间的显著性差异值,通过中值滤波生成多个所述第一图像的各像素块的显著性值,提取多个所述第一图像中显著性值超过第一阈值的各像素块,并计算各像素块的重合区域生成显著性区域位置信息,基于所述显著性区域位置信息分割所述超声b扫图像并生成所述目标区域图像。其中,所述数据处理单元在生成显著性区域位置信息后,还基于模糊算法降低非显著性区域位置的像素点的分辨率,实现所述超声b扫图像的弱化背景。
29.更进一步的,所述超声判伤系统还包括数据存储单元,用于存储所述数据处理单元生成的所述缺陷区域信息和用于表征预标定缺陷信号的所述第一阈值。其中,所述数据处理单元与所述数据存储单元电气连接。
30.以上对本发明实施例所提供的列车车轴镶入部位超声判伤方法及其系统进行了详细介绍。说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说
明即可。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
31.专业人员还可以进一步意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
32.结合本文中所公开的实施例描述的方法或算法的步骤可以直接用硬件、处理器执行的软件模块,或者二者的结合来实施。软件模块可以置于随机存储器(ram)、内存、只读存储器(rom)、电可编程rom、电可擦除可编程rom、寄存器、硬盘、可移动磁盘、cd
‑
rom、或技术领域内所公知的任意其它形式的存储介质中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1