1.本发明涉及目标测距技术领域,具体为一种单目视觉测距的处理方法。
背景技术:2.随着公路交通特别是高速公路系统的发展,交通事故率也呈现上升趋势,交通安全越来越成为人们关注的焦点。因此,研究车辆安全辅助驾驶技术,为车辆提供安全辅助驾驶功能,从而为减少因驾驶者主观因素造成的交通事故提供智能技术服务。距离传感器与视频传感器相结合进行测距、测速以及目标识别,是目前智能车、无人车的主要数据采集与分析手段。数量与种类繁多的传感器,每秒海量的数据传输与处理需求,使得目前的智能车、无人车在硬件制造成本、维护成本和数据处理成本及技术复杂性方面急剧增加,这不仅影响智能车、无人车的技术开发速度,还影响智能车、无人车的市场推广。而分析智能车、无人车制造、维护与技术成本、技术难度急剧增加的关键原因,在于传感器数量的无节制增加。
3.目前,车载单目视觉测距过程中,需要利用图像的准确信息进行测量,容易因为图像信息的不准确而导致测量的不准确,车载单目视觉距离测量方法存在测量准确性与实时性较低、测量过程复杂的技术问题。
技术实现要素:4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种单目视觉测距的处理方法,具备图像信息测量准确、实时性高和测量过程简单的优点,解决了图像信息测量不准确、测量准确性与实时性低、测量过程复杂的问题。
6.(二)技术方案
7.为实现以上目的,本发明提供如下技术方案:一种单目视觉测距的处理方法,包括以下步骤:
8.s1)通过单目摄像头拍摄物体,对物体进行图像采集;
9.s2)将采集的图像进行预处理,采用高斯滤波器对视频图像进行初步去噪、滤波处理;
10.s3)对成像图片和实际场景进行测量目标的物距,进行物体位置定位;
11.s4)将测量的物距通过互联网传输到中央处理器进行计算处理;
12.s5)然后通过pid控制器,对像距误差和入射误差进行计算,将计算的数据通过中央处理器传输到存储单元进行储存备份;
13.s6)将计算后的实际距离传输到显示器上,进行实施显示测试数据。
14.优选的,所述单目摄像头是圆形车载摄像头或方形车载摄像头等的一种或多种。
15.优选的,所述图片预处理对采集的图像进行噪声和滤波进行处理,对图片进行成像处理。
16.优选的,所述给定目标位置坐标对成像图片和实际场景进行测量目标的物距。
17.优选的,所述中央处理器的输入端连接有互联网的输出端,所述中央处理器的输入端连接有电源的输出端。
18.优选的,所述中央处理器双向连接有存储单元,所述中央处理器双向连接有pid控制器。
19.优选的,所述pid控制器对像距误差和入射误差进行计算,通过显示器进行显示实际的测试物距。
20.(三)有益效果
21.与现有技术相比,本发明提供了一种单目视觉测距的处理方法,具备以下有益效果:
22.该单目视觉测距的处理方法,通过单目摄像头拍摄物体,对物体进行图像采集,不同的物体图像都能通过单目摄像头采集下来,比如静态图像、动态图像、不同的位置、不同形态进行高效的采集,将采集的图像进行预处理,采用高斯滤波器对视频图像进行初步去噪、滤波处理,高斯滤波的具体操作是用一个模板扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值,对视频图像进行初步去噪、滤波处理,保证图像的高清和准确性,对成像图片和实际场景进行测量目标的物距,进行物体位置定位,对采集的图像和实际场景中的物体图像进行测量,确定目标物体的计算出的真实距离,将测量的物距通过互联网传输到中央处理器进行计算处理,经过中央处理器进行对拍摄的图像进行计算处理,更好的确认真实物体位置距离,然后通过pid控制器,对像距误差和入射误差进行计算,将计算的数据通过中央处理器传输到存储单元进行储存备份,将处理后的数据通过存储单元进行存储保存,便于后序的查找使用和对比作为样本,将计算后的实际距离传输到显示器上,进行实施显示测试数据,将物体的实际距离传输到显示器上进行实施显示,以保证物体的实际距离得到检测,保证安全性,有利于图像信息测量的准确性、实时性高、测量过程方便等优点。
附图说明
23.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
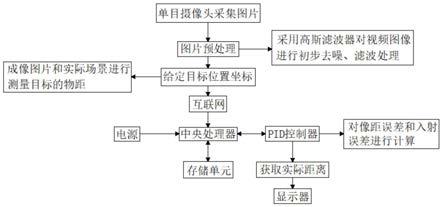
24.图1为本发明的单目视觉测距的处理方法的流程图。
具体实施方式
25.下面将结合本发明的实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.本发明实施例提供一种单目视觉测距的处理方法,如图1所示,包括以下步骤:
27.s1)通过单目摄像头拍摄物体,对物体进行图像采集,不同的物体图像都能通过单目摄像头采集下来,比如静态图像、动态图像、不同的位置、不同形态进行高效的采集;
28.s2)将采集的图像进行预处理,采用高斯滤波器对视频图像进行初步去噪、滤波处
理,高斯滤波的具体操作是用一个模板扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值,对视频图像进行初步去噪、滤波处理,保证图像的高清和准确性;
29.s3)对成像图片和实际场景进行测量目标的物距,进行物体位置定位,对采集的图像和实际场景中的物体图像进行测量,确定目标物体的计算出的真实距离;
30.s4)将测量的物距通过互联网传输到中央处理器进行计算处理,经过中央处理器进行对拍摄的图像进行计算处理,更好的确认真实物体位置距离;
31.s5)然后通过pid控制器,对像距误差和入射误差进行计算,将计算的数据通过中央处理器传输到存储单元进行储存备份,将处理后的数据通过存储单元进行存储保存,便于后序的查找使用和对比作为样本;
32.s6)将计算后的实际距离传输到显示器上,进行实施显示测试数据,将物体的实际距离传输到显示器上进行实施显示,以保证物体的实际距离得到检测,保证安全性。
33.具体的,单目摄像头是圆形车载摄像头或方形车载摄像头等的一种或多种,图片预处理对采集的图像进行噪声和滤波进行处理,对图片进行成像处理,给定目标位置坐标对成像图片和实际场景进行测量目标的物距,通过单目摄像头拍摄物体,对物体进行图像采集,不同的物体图像都能通过单目摄像头采集下来,比如静态图像、动态图像、不同的位置、不同形态进行高效的采集,将采集的图像进行预处理,采用高斯滤波器对视频图像进行初步去噪、滤波处理,通过高斯滤波是一种线性平滑滤波,适用于消除高斯噪声,广泛应用于图像处理的减噪过程,高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过加权平均后得到,提高物体实际距离测量的准确性;
34.中央处理器的输入端连接有互联网的输出端,中央处理器的输入端连接有电源的输出端,中央处理器双向连接有存储单元,中央处理器双向连接有pid控制器,pid控制器对像距误差和入射误差进行计算,通过显示器进行显示实际的测试物距,通过pid控制器可以根据历史数据和差别的出现率来调整输入值,这样可以使系统更加准确,更加稳定,可以通过数学的方法证明,在其他控制方法导致系统有稳定误差或过程反复的情况下,一个pid反馈回路却可以保持系统的稳定,在一个pid回路中,消除误差,平均过去的误差,和透过误差的改变来预测将来的误差,通过pid控制器,对像距误差和入射误差进行计算,将计算的数据通过中央处理器传输到存储单元进行储存备份,将处理后的数据通过存储单元进行存储保存,便于后序的查找使用和对比作为样本,将计算后的实际距离传输到显示器上,进行实施显示测试数据,将物体的实际距离传输到显示器上进行实施显示,以保证物体的实际距离得到检测,保证安全性,有利于图像信息测量的准确性。
35.综上所述:该单目视觉测距的处理方法,通过单目摄像头拍摄物体,对物体进行图像采集,不同的物体图像都能通过单目摄像头采集下来,比如静态图像、动态图像、不同的位置、不同形态进行高效的采集,将采集的图像进行预处理,采用高斯滤波器对视频图像进行初步去噪、滤波处理,高斯滤波的具体操作是用一个模板扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值,对视频图像进行初步去噪、滤波处理,保证图像的高清和准确性,对成像图片和实际场景进行测量目标的物距,进行物体位置定位,对采集的图像和实际场景中的物体图像进行测量,确定目标物体的计
算出的真实距离,将测量的物距通过互联网传输到中央处理器进行计算处理,经过中央处理器进行对拍摄的图像进行计算处理,更好的确认真实物体位置距离,然后通过pid控制器,对像距误差和入射误差进行计算,将计算的数据通过中央处理器传输到存储单元进行储存备份,将处理后的数据通过存储单元进行存储保存,便于后序的查找使用和对比作为样本,将计算后的实际距离传输到显示器上,进行实施显示测试数据,将物体的实际距离传输到显示器上进行实施显示,以保证物体的实际距离得到检测,保证安全性,有利于图像信息测量的准确性、实时性高、测量过程方便等优点。
36.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个限定词”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
37.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。