一种航空航天复合材料损伤可视化特征提取方法与流程
1.本发明属于航空航天飞行器损伤检测与维修保障技术领域,更具体地说,本发明涉及一种航空航天复合材料损伤可视化特征提取方法。
背景技术:
2.随着航空航天飞行器迫切的减重需求,具有优异力学性能的轻质结构材料,尤其是以高强/高模碳纤维复合材料、蜂窝结构材料等为代表的轻质复合材料,日益成为航空航天研究的热点。与此同时,具有特殊功能用途的复合材料,如隐身涂层材料、碳基防热材料等功能复合材料在航空航天领域的应用也更加广泛。然而,复合材料在生产制造、装配加工或实时使用过程中,由于工艺不当、反复循环应力和外部冲击等会导致严重的质量问题,如分层、脱粘、疏松、裂纹和冲击缺陷等。比如,飞机在起飞和降落过程中容易受到飞鸟的撞击,航天器在发射和在轨运行过程中遭受微小空间碎片的超高速撞击,从而导致航空航天飞行器复合材料表面产生各类损伤,比如穿孔、撞击坑、层裂、剥落等,使得飞行器表面复合材料结构发生破坏或者功能下降、失效。因此,为了避免航空航天复合材料构件在使用过程中由各类损伤缺陷而引起严重事故,对复合材料开展损伤缺陷检测和质量评价尤为关键。
3.红外热成像技术具有安全、直观、快速、高效、检测面积大、无接触等优点,在航天器在轨检测中发挥了重要作用,其基础原理是:基于傅里叶传热与红外辐射原理,当被检对象受到外部热激励时(太阳光照射或人工光源照射),由于材料缺陷的存在导致热传导过程受到影响,并表现为被检对象表面瞬态温度响应的差异,通过红外热像仪采集表面温度场响应,从而了解被检对象表面和内部的缺陷状态。红外成像仪采集到的数据是由多帧红外热图像构成的红外热图像序列数据,其包含了被检区域内每个像素点的温度变化信息(瞬态热响应曲线),通过对红外热图像序列数据进行分析和处理,获取缺陷的重构图像,从而实现对复合材料撞击损伤缺陷的可视化检测。
4.为了对损伤缺陷进行精确评估,就需要对缺陷的红外重构图像中目标缺陷区域与背景区域进行有效分离。区别于常规的自然可见光图像,红外图像具有较低的分辨率和模糊的边缘,尤其是在复杂的检测背景中,由于背景中存在其他热源或者是材料本身的热反射性强等原因,会导致背景区域重叠和混乱,降低目标与背景之间的对比度,严重干扰重构图像中的缺陷识别,并对缺陷区域精确提取和类型准确识别造成较大困难。为解决上述问题,需要通过图像分割算法对原始图像进行处理,将目标区域与背景区域有效分离,可见,正确分割缺陷成为目标识别过程中的关键步骤。在现有的研究中,通过利用fcm算法及其改进的算法对图像进行分割,但是这些分割问题往往面向的是一个损伤函数,即一个目标函数。一方面,如果在充分满足保留细节的前提下,缺陷的检测率虽有一定的提高,但是也保留了噪声,容易对缺陷识别造成误判,导致误检率的上升。另一方面,若只满足对图像进行整体去噪,由于微小碎片撞击导致的损伤缺陷尺寸小且数量多,这些同噪音近似的微小缺陷会一并随着去噪过程而去除,降低了缺陷的检测率和检测精度。因此,上述常规分割方法运用到本发明对象,即缺陷的红外重构图像中,由于不能权衡缺陷的误检率与检测率,分割
效果不尽人意。特别是考虑到红外热图像反映的是试件的热辐射信息,容易受到环境、成像链路等影响,使得获得的缺陷红外重构图像背景噪声大。同时,由于缺陷区域与背景区域的表面热辐射能力的差异,使得缺陷的红外重构图像的边缘不够平滑、边缘区域划分不够清晰,也不利于图像分割。
5.为了降低缺陷的误检率并提高检测率,去除噪声并充分保留细节,我们设置了噪声消除函数和细节保留函数,并且考虑到红外图像反映的是通过施加热激励后不同区域的温度差异,而温度变化是连续的,因此各区域之间没有明显的轮廓划分,所以我们又引入了一个边缘保持函数,以实现对缺陷的准确分割。在设置噪声消除函数时,通过设置模糊因子充分考虑红外图像的邻域信息尽可能地消除噪声像素点对红外图像分割的影响,但是红外图像受到噪声影响较大,在噪声消除效果不好时,可能会出现相似的两类缺陷分为一类、将噪声和边界分为一类的情况,故我们引入了一个衡量类间离散度的函数,能够灵活调整各类别聚类中心之间的距离,来解决相似性较小的不同缺陷类别之间的像素点难以区分的问题。在设置细节保留函数时,为了保留更多的缺陷细节信息,需要分割后图像的紧致性小且分离性大,并且为了增强微小缺陷信息,这里考虑到邻域像素点和中心像素点位置和颜色之间的相关性,引入了一个相关性系数,如果邻域像素与中心像素的相关性较大,则在目标函数中考虑该像素的信息,如果邻域像素与中心像素的相关性较小,则在目标函数中不考虑该像素的信息。在设置边缘保持函数时,利用局部梯度信息,通过计算边缘像素来对红外图像进行边缘修订,准确分割的关键是邻域像素对中心像素的影响程度,因此这里基于像素灰度差的相关性来计算邻域像素对中心像素的影响程度,相关性大的,说明该邻域像素和中心像素属于同一类,并通过放大邻域像素对中心像素隶属度的影响来增强缺陷边缘信息,从而提高图像分割效果。
6.设置了实现三个分割性能的目标函数后,新的问题是如何调整三个目标函数的权重系数,使得其构成的分割目标函数具有最好的分割性能。本发明采用了双层分割模型,第一层通过多目标优化算法求得各目标函数的权重系数;第二层利用求得的权重系数构造分割目标函数实现红外图像分割。
7.在求解各目标函数的权重系数时,我们在经过处理后得到的包含完整缺陷信息的低质红外图像中,利用多目标算法,通过权重向量将多目标优化问题分解为若干个标量子问题,每个子问题的权重向量的分量能够反映每个目标函数对分割目标函数重要程度。为了在空间中选择最合适的权重系数,本发明在多目标算法迭代求解的过程中结合权重向量调整,在调整权重向量时,考虑到稀疏数据会导致部分缺陷特征缺失,不能反映某些维度目标函数的分割性能,用欧式距离来定义数据的稀疏度水平大小,基于像素点的稀疏度水平大小来调整权重向量,在低质红外图像中搜索得到最能反映每个目标函数的重要程度的权重系数。在低质红外图像中搜索得到权重系数后,再回到全像素红外图像中,根据求解权重系数得到的分割目标函数进行图像分割。
8.本发明基于多目标优化分割的缺陷检测,使用红外热像仪记录被测对象表面温度场变化,满足原位、非接触的无损检测需求,通过对红外热图像序列进行分析处理,满足对复杂缺陷高精度检测和识别需求。算法使用变换行列步长的方式对红外热图像序列进行采样,获得具有典型温度变化特征的瞬态热响应曲线构成的数据集,提高后续数据分类的速度。利用fcm算法得到个像素点与聚类中心的隶属度,对比隶属度大小对数据集中每一瞬态
热响应曲线进行分类,并选取分类后的典型热响应曲线进行红外热图像重建,获得缺陷重构图像。在此基础上,本发明进一步利用多目标优化理论进行红外重构图像中的缺陷分割,针对噪声问题和边缘模糊问题分别构造合适的目标函数以提高分割的精度,既保证了缺陷的检测率高同时也降低了误检率,从而有效提取出重构图像中的损伤缺陷区域,以便于复杂缺陷的量化研究。
技术实现要素:
9.本发明的一个目的是解决至少上述问题和/或缺陷,并提供至少后面将说明的优点。
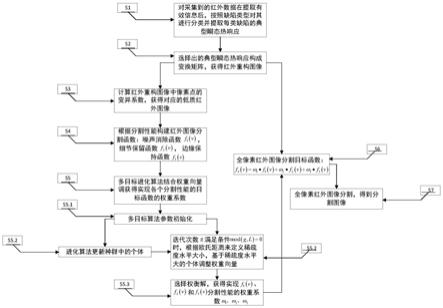
10.为了实现根据本发明的这些目的和其它优点,提供了一种航空航天复合材料损伤可视化特征提取方法,包括以下步骤:
11.步骤一、对采集到的试件红外数据在提取有效信息后,按照缺陷类型对其进行分类并提取每类缺陷的典型瞬态热响应;
12.步骤二、将选择出的典型瞬态热响应构成变换矩阵,获得红外重构图像;
13.步骤三、对重构得到的k大小维m
×
n的红外图像,计算像素其变异系数,通过测量邻域像素与中心像素的同质性,将最能突出的像素采样出来,获得k 张包含了完整缺陷信息的含有kn个像素点的低质红外重构图像;
14.步骤四、在经过处理得到每张红外重构图像的相应的包含完整缺陷信息的含有kn个像素点的低质红外重构图像中,利用多目标衡量去除噪声、保留细节、保持边缘三个方面的分割性能,求取各个分割性能的权重系数以构建分割目标函数;在噪声去除、保留细节及保持边缘三种目的的指导下构建红外图像分割函数;
15.步骤五、构建双层分割模型的第一层,双层分割模型的第一层为权重系数确定层,在提取出来包含完整的缺陷信息的低质红外重构图像中,采用多目标优化算法权衡设置的三个目标函数,设置多目标优化问题;多目标优化算法结合权重向量获得实现各个分割性能的目标函数的权重系数,具体步骤包括:
16.步骤s51、多目标优化算法参数初始化;获取kn个均匀分布的权重向量,并计算每个权重向量最近的t个权重向量;在满足多目标优化问题的可行空间采样产生初始种群;初始化多目标优化函数;采用基于切比雪夫的分解模型分解子问题;设置外部种群ep为空集;
17.步骤s52、进化多目标优化算法,更新种群中的个体;根据欧式距离定义稀疏度水平大小,基于稀疏度水平大的个体调整权重向量;
18.步骤s53、选择权衡解,获得实现去除噪声、保留细节、保持边缘函数分割性能的权重系数;
19.步骤六、构建全像素红外图像分割目标函数,将步骤五求得的权重系数输入到双层分割模型的第二层,双层分割模型第二层为图像分割层,利用双层分割模型对重构得到的像素点个数为m
×
n的全像素红外图像进行图像分割;
20.步骤七、根据步骤六中构建的全像素红外图像分割目标函数已经求取的隶属度、聚类中心更新公式,输入算法终止判断的阈值和最大迭代次数,在图像分割层实现红外全像素图像分割,得到试件缺陷的分割图像。
21.优选的是,其中,所述步骤一的具体方法包括:对采集到的试件d维红外热图像序
列s(m,n,:),采用分块分步长的方式提取有效的瞬态热响应,其中 m和n分别表示三维矩阵的第m行和第n列,第三个维度表示红外热图像的帧数;对提取出的有效瞬态热响应根据缺陷类型k,对其划分为k个区域,从划分好的各类缺陷区域中提取最能代表当前类别缺陷特征的典型瞬态热响应。
22.优选的是,其中,所述步骤二获得红外重构图像的方法为:由步骤一提取的k个d维典型瞬态热响应,获得维度为d
×
k的线性变化矩阵h1,将s(m,n,:) 由三维矩阵化为二维矩阵,即对红外热视频中每一帧图像向量化,将每一帧图像矩阵按列取值并排列后得到包含一帧的像素点温度信息的向量且作为新矩阵的行向量,构建出一个新的二维矩阵p(x,y)
a
×
b
,a=d,b=m
×
n;用矩阵 h1对p进行线性变换,即其中为矩阵h1的k
×
d维伪逆矩阵;将二维图像矩阵o再按行取值构成原图像尺寸大小的二维图像,得到k张大小为m
×
n的红外重构图像。
23.优选的是,其中,所述步骤四在噪声去除、保留细节以及保持边缘三种目的的指导下构建的红外图像分割函数为:
24.f4(v)=ω1·
f1(v)+ω2·
f2(v)+ω3·
f3(v)
25.其中,ω1、ω2、ω3分别为三个目标函数的权重系数;
26.步骤s41、f1(v)为解决噪声问题的单目标噪声去除函数sgns;在fcm 算法中引入模糊因子,利用重构图像邻域窗内像素点间的欧氏距离d
ij
来确定像素点间的空间约束关系的基础上,针对差异不大的相近类别之间难以区分的问题再引入一个类间离散度度量函数,设计的f1(v)表达式下式所示:
[0027][0028]
其中,u
ti
是像素点x
i
对聚类中心v
t
的隶属度,w
ir
是以像素x
i
为中心大小为r
×
r的邻域窗,x
j
则为红外重构图像中心像素x
i
的邻域像素,m∈[1,∞)为平滑参数,是红外重构图像中的像素x
i
与聚类中心v
t
的高斯径向基相似度测量函数,度测量函数,是新的加权模糊因子,表示像素x
i
领域内第j个像素关于聚类中心v
t
的加权模糊因子,满足其中空间距离约束ζ
dc
满足空间灰度约束ζ
gc
满足其中,表示像素x
j
的r
×
r邻域内所有像素点;
[0029]
m
i
的方差与均方的比值,ε
ij
为邻域像素点x
j
与中心像素点x
i
应均方差在核空间投影的值,即,常数2用以增强邻域像素点对中心像素点的抑制作用;η
t
为类间离散度参数,v
t
为聚类中心代表当前类别像素点的温度均值,为红外图像中所有像素点的温度均值,函数 f1(v)需要满足:利用拉格朗日乘数法求得像素x
i
相对于聚类中心v
t
的隶属度为
[0030][0031]
聚类中心v
t
更新公式为:
[0032][0033]
步骤s42、f2(v)为解决细节保留问题的单目标细节保留函数sgdr;考虑图像局部空间信息能进一步指导图像像素的分割,有利于解决边缘模糊的问题,并引入一个衡量像素位置及像素的颜色的相关系数m
ij
,构造细节保留函数f2(v)如下式所示:
[0034][0035]
其中,v
t
是聚类中心,u
ti
是像素点x
i
对聚类中心v
t
的隶属度,m∈[1,∞)为平滑参数,δ
i
表示局部空间信息,n
i
是以第i个像素为中心的邻域窗内像素的集合,x
a
是n
i
里第a个像素,表示邻域像素x
i
与中心像素v
t
的相关性,记像素x
i
和v
t
的空间坐标分别为(x
im
,y
in
)、(v
tm
,v
tn
),灰度值分别为g(x
i
)、g(v
t
),则有λ
s
是空间尺度的影响因子,
其中,λ
g
是灰度尺度影响因子,为以像素x
i
为中心的邻域像素的平均灰度方差,是邻域像素集合n
i
中的像素个数,函数f2(v)需要满足:利用拉格朗日乘数法求得像素x
i
相对于聚类中心v
t
的隶属度为
[0036][0037]
聚类中心v
t
的更新公式为:
[0038][0039]
步骤s43、f3(v)为解决边缘保持问题的单目标边缘保持函数soem;为了获得准确的分割结果,在目标函数中引入一个根据灰度级进行分割的边缘保持函数,并且为了加强边缘信息,引入了一个放大函数a
ti
放大邻域像素x
i
对中心像素v
t
隶属度的影响,构造边缘保持函数f3(v)如下式所示:
[0040][0041]
其中,n表示像素点的灰度值,u
ti
表示灰度值为n的像素点x
i
关于当前聚类中心v
t
的隶属度,m∈[1,∞)为平滑参数,u
n
为红外图像灰度级数目,n
n
为灰度值为n的像素点个数,为含有kn个像素点的低质图像中的像素点,n
i
是以像素x
i
为中心的邻域像素集合,是集合n
i
中的像素点个数,g(x
i
)和g(x
j
)分别表示像素点x
i
和其邻域像素x
j
的灰度值,为邻域像素集合n
i
中的像素x
j
与中心像素x
i
的平均灰度差;函数f3(v)需要满足:利用拉格朗日乘数法求得像素x
i
相对于
聚类中心v
t
的隶属度为
[0042][0043]
聚类中心v
t
的更新公式为:
[0044][0045]
由此完成了红外图像分割函数的构建。
[0046]
优选的是,其中,所述步骤五设置的多目标优化问题如下式所示:
[0047]
minf(ν)=[f1(ν),f2(v),f3(v)]
t
[0048]
s.t v=(v1,
…
,v
c
)
t
[0049]
其中,c为分类数目,v=(v1,
…
,v
c
)
t
表示一组候选聚类中心,利用权重向量将多目标优化问题分解为若干个标量子问题,每个子问题的权重向量的分量能够反映每个目标函数对分割目标函数重要程度;
[0050]
多目标算法在像素点个数为kn的低质红外重构图像中求取各个目标函数的权重系数的具体步骤如下:
[0051]
步骤s51、多目标优化算法参数初始化,具体步骤包括:
[0052]
步骤s511、多目标优化的目标函数f(v),最大迭代次数g
max
,阈值ζ、ε;种群大小kn;每个邻域中权重向量的个数t;
[0053]
步骤s512、获取kn个均匀分布的权重向量:λ1,
…
,λ
kn
并计算每个权重向量最近的t个权重向量b(i)={i1,
…
,i
t
},i=1,
…
,kn,是λ
i
最近的t个权重向量;
[0054]
步骤s513、在满足多目标问题的可行空间中均匀采样产生初始种群 s1,
…
,s
kn
,令fv
i
=f(s
i
),i=1,
…
,kn;
[0055]
步骤s514、初始化f
*
=(f
1*
,f
2*
,f
3*
)
t
,满足其为图像分割多目标问题中的每个目标函数的最优值;
[0056]
步骤s515、采用基于切比雪夫的分解模型分解子问题,其中第j个子问题为:
[0057][0058]
上式中,是第j个子问题的权重向量,控制噪声抑制函数的权值,控制细节保留函数的权重,控制边缘保持函数的权重,f
1*
、 f
2*
和f
3*
分别三个函数当前的最优函数值;
[0059]
步骤s516、设置外部种群ep为空集;
[0060]
步骤s52、进行多目标优化算法更新;当小于最大迭代次数g
max
时,每迭代l次更新权重向量一次,即mod(g,l)=0时,先进入步骤s521更新种群中个体,再进行步骤s522调整权重向量,否则只进行步骤s521更新种群中的个体;
[0061]
步骤s521、更新种群中的个体,具体包括:
[0062]
步骤s5211、复制:从b(i)中随机选取两个序号k,l,运用差分进化算法由 s
k
,s
l
产生一个对于图像分割多目标问题新的解e;
[0063]
步骤s5212、改进:对e进行图像分割多目标优化问题中所提出的约束条件处理产生e
′
;
[0064]
步骤s5213、更新参考点f
*
,若参考点的数值f
*
<f
*
(e'),则f
*
=f
*
(e');
[0065]
步骤s5214、更新邻域解:根据tchebycheff的数学表达式若 g
te
(e'|λ
j
,f
*
)≤g
te
(s
j
|λ
j
,f
*
),j∈b(i),则s
j
=e
′
,,fv
i
=f(e
′
);
[0066]
步骤s522、调整权重向量,具体包括:
[0067]
步骤s5221、计算种群中的个体与其k个近邻的欧式距离和:
[0068][0069]
其中,为的k个近邻;
[0070]
步骤s5222、对sud大的n个个体进行更新操作,具体包括:
[0071]
步骤s52221、删除个体对应的权重向量λ
n
,插入新的权重向量λ
new
:
[0072][0073]
其中,λ
new
=(λ
new1
,λ
new2
,λ
new3
);
[0074]
步骤s52222、从权重向量λ
n
的邻域向量中随机找到两个权重向量λ
n1
和λ
n2
,并找到它们对应的个体和
[0075]
步骤s52223、在两个个体和之间随机生成一个新解
[0076][0077]
步骤s52224、生成新的个体作为新的聚类中心:以为中心,根据设置的三类目标函数对应的隶属度计算公式和聚类中心计算公式,计算当前隶属度:
[0078][0079]
根据当前隶属度计算新聚类中心:
[0080][0081]
步骤52225、用新的个体替换
[0082]
步骤s523、更新ep;移除所有被f(e
′
)支配的向量,若f(e
′
)不被ep里面向量所支配,把e
′
加入ep;
[0083]
步骤s53、终止迭代;若满足终止条件g=g
max
,输出ep得到最优即得到使图像分割多目标问题达到最优聚类中心集;否则增加迭代次数g=g+1转到步骤s52。
[0084]
优选的是,其中,所述步骤六构建全像素红外图像分割目标函数的具体步骤包括:将步骤五求得的权重系数输入到双层分割模型的第二层,利用双层分割模型对重构得到的像素点个数为m
×
n的全像素红外图像进行图像分割;
[0085]
双层分割模型的第二层中,针对红外热图像的像素点个数为m
×
n的全像素图像有如下的优化函数:
[0086][0087]
在求解这个目标函数时,由于细节保留函数f2(v)中的分离性度量不含有像素x
i
关于聚类中心v
t
的隶属程度u
ti
,故将对以下函数做拉格朗日乘数法下的隶属度函数和聚类中心的求解:
[0088][0089]
则隶属度的更新公式为:
[0090][0091]
同时聚类中心的更新公式为:
[0092][0093]
全像素红外图像分割目标函数便构建完成。
[0094]
优选的是,其中,所述步骤七在双层分割模型第二层实现红外全像素图像分割的具体步骤为:
[0095]
步骤s71、初始化迭代次数t,生成初始聚类中心并计算初始隶属度;
[0096]
步骤s72、计算当前迭代次数下的分割目标函数
[0097]
步骤s73、按照公式
[0098][0099]
更新隶属度;
[0100]
步骤s74、按照公式
[0101][0102]
更新聚类中心;
[0103]
步骤s75、计算更新后的目标函数
[0104]
步骤s76、若或t=t
max
,则分割算法结束,将像素点划分为隶属度值最大的那一类缺陷区域,得到分割后的图像,即最终对全像素的红外重构图像获取整幅观测图像的分割结果。
[0105]
本发明至少包括以下有益效果:本发明提供的航空航天复合材料损伤可视化特征提取方法通过红外热图像序列数据中温度点最大值进行列向搜索比较获得变换列步长,同时利用瞬态热响应曲线中温度最大值对数据进行分块,获得每个数据块的变换行步长,使用变换列步长和变换行步长进行采样获得具有含有典型温度变化的瞬态热响应曲线构成的采样数据集,使用fcm算法,得到了采样数据集分类的隶属度。利用隶属度对数据集中每一瞬态热响应曲线进行分类,并利用分类后的典型热响应曲线进行重构缺陷图像。构造双层多目标优化的热图像分割框架,实现缺陷的精准分割。
[0106]
同时,本发明航空航天复合材料损伤可视化特征提取方法,还具有以下有益效果:
[0107]
(1)、本发明提出的双层多目标优化的热图像分割框架将多目标理论引入,针对需要被解决的三个目标问题分别建立目标函数,针对性地解决分割问题,使获得的分割图像是三者的权衡,分割获得的结果图像兼具噪声消除、细节保留和边缘保持三种性能。为了在空间中选择最合适的权重系数,本发明在多目标算法迭代求解的过程中结合权重向量调整,在调整权重向量时,考虑到稀疏数据会导致部分缺陷特征缺失,不能反映某些维度目标函数的分割性能,用欧式距离来定义数据的稀疏度水平大小,基于像素点的稀疏度水平大小来调整权重向量,在低质红外图像中搜索得到最能反映每个目标函数的重要程度的权重系数。在低质红外图像中搜索得到权重系数后,再回到全像素红外图像中,根据求解权重系数得到的分割目标函数进行图像分割。
[0108]
(2)、本发明提出的双层分割模型,能够在保证分割质量的前提条件下,解决由多目标算法本身、实验采集到的红外数据量庞大造成的计算效率低下的问题。
[0109]
(3)本发明提出的双层多目标优化的热图像分割框架不用重复计算噪声消除、细节保留和边缘保持三者对应的目标函数的权重系数,适用性更强。
[0110]
本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明:
[0111]
图1为本发明航空航天复合材料损伤可视化特征提取方法流程图;
[0112]
图2为本发明实施例中多目标优化问题求解后得到的pf面图;
[0113]
图3为本发明实施例中复合材料撞击坑内部的ttr曲线;
[0114]
图4为本发明实施例中复合材料撞击坑内部ttr曲线对应的红外重构图像;
[0115]
图5为本发明实施例中复合材料撞击坑背景区域的ttr曲线;
[0116]
图6为本发明实施例中复合材料撞击坑背景区域ttr曲线对应的红外重构图像;
[0117]
图7为本发明实施例中复合材料撞击坑边缘的ttr曲线;
[0118]
图8为本发明实施例中复合材料撞击坑边缘ttr曲线对应的红外重构图像;
[0119]
图9为本发明实施例复合材料撞击坑边缘重构图像缺陷分割结果图;
[0120]
图10为本发明实施例复合材料撞击坑中心重构图像缺陷分割结果图。
具体实施方式:
[0121]
下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
[0122]
应当理解,本文所使用的诸如“具有”、“包含”以及“包括”术语并不配出一个或多个其它元件或其组合的存在或添加。
[0123]
如图1所示:本发明的一种航空航天复合材料损伤可视化特征提取方法,包括以下步骤:
[0124]
步骤一、对采集到的试件红外数据在提取有效信息后,按照缺陷类型对其进行分类并提取每类缺陷的典型瞬态热响应;
[0125]
步骤二、将选择出的典型瞬态热响应构成变换矩阵,获得红外重构图像;
[0126]
步骤三、对重构得到的k大小维m
×
n的红外图像,计算像素其变异系数,通过测量邻域像素与中心像素的同质性,将最能突出的像素采样出来,获得k 张包含了完整缺陷信息的含有kn个像素点的低质红外重构图像;
[0127]
步骤四、在经过处理得到每张红外重构图像的相应的包含完整缺陷信息的含有kn个像素点的低质红外重构图像中,利用多目标衡量去除噪声、保留细节、保持边缘三个方面的分割性能,求取各个分割性能的权重系数以构建分割目标函数;在噪声去除、保留细节及保持边缘三种目的的指导下构建红外图像分割函数;
[0128]
步骤五、构建双层分割模型的第一层,双层分割模型的第一层为权重系数确定层,在提取出来包含完整的缺陷信息的低质红外重构图像中,采用多目标优化算法权衡设置的三个目标函数,设置多目标优化问题;多目标优化算法结合权重向量获得实现各个分割性能的目标函数的权重系数,具体步骤包括:
[0129]
步骤s51、多目标优化算法参数初始化;获取kn个均匀分布的权重向量,并计算每个权重向量最近的t个权重向量;在满足多目标优化问题的可行空间采样产生初始种群;初始化多目标优化函数;采用基于切比雪夫的分解模型分解子问题;设置外部种群ep为空集;
[0130]
步骤s52、进化多目标优化算法,更新种群中的个体;根据欧式距离定义稀疏度水平大小,基于稀疏度水平大的个体调整权重向量;
[0131]
步骤s53、选择权衡解,获得实现去除噪声、保留细节、保持边缘函数分割性能的权重系数;
[0132]
步骤六、构建全像素红外图像分割目标函数,将步骤五求得的权重系数输入到双层分割模型的第二层,双层分割模型第二层为图像分割层,利用双层分割模型对重构得到的像素点个数为m
×
n的全像素红外图像进行图像分割;
[0133]
步骤七、根据步骤六中构建的全像素红外图像分割目标函数已经求取的隶属度、
聚类中心更新公式,输入算法终止判断的阈值和最大迭代次数,在图像分割层实现红外全像素图像分割,得到试件缺陷的分割图像。
[0134]
在上述技术方案中,所述步骤一的具体方法包括:对采集到的试件d维红外热图像序列s(m,n,:),采用分块分步长的方式提取有效的瞬态热响应,其中m和n分别表示三维矩阵的第m行和第n列,第三个维度表示红外热图像的帧数;对提取出的有效瞬态热响应根据缺陷类型k,对其划分为k个区域,从划分好的各类缺陷区域中提取最能代表当前类别缺陷特征的典型瞬态热响应。
[0135]
在上述技术方案中,所述步骤二获得红外重构图像的方法为:由步骤一提取的k个d维典型瞬态热响应,获得维度为d
×
k的线性变化矩阵h1,将 s(m,n,:)由三维矩阵化为二维矩阵,即对红外热视频中每一帧图像向量化,将每一帧图像矩阵按列取值并排列后得到包含一帧的像素点温度信息的向量且作为新矩阵的行向量,构建出一个新的二维矩阵p(x,y)
a
×
b
,a=d,b=m
×
n;用矩阵h1对p进行线性变换,即其中为矩阵h1的k
×
d维伪逆矩阵;将二维图像矩阵o再按行取值构成原图像尺寸大小的二维图像,得到k张大小为m
×
n的红外重构图像。
[0136]
在上述技术方案中,缺陷的红外重构图像受复杂能量来源、成像链路、试件表面杂质等带来的背景噪声大,红外重构图像颜色信息弱,对比度差的问题,使得一般分割方式不能获得良好的分割结果。为了利用实现含有m
×
n 个像素的红外重构图像x=(x1,
…
,x
mn
)进行背景区域与缺陷区域的准确分离,本发明在经过处理得到每张红外重构图像的相应的包含完整缺陷信息的含有 kn个像素点的低质红外重构图像中,利用多目标衡量去除噪声、保留细节、保持边缘三个方面的分割性能,求取各个分割性能的权重系数以构建分割目标函数。在噪声去除、保留细节及保持边缘三种目的的指导下构建以下红外图像分割函数:
[0137]
f4(v)=ω1·
f1(v)+ω2·
f2(v)+ω3·
f3(v)
[0138]
其中,ω1、ω2、ω3分别为三个目标函数的权重系数;
[0139]
步骤s41、f1(v)为解决噪声问题的单目标噪声去除函数sgns;在fcm 算法中引入模糊因子,利用重构图像邻域窗内像素点间的欧氏距离d
ij
来确定像素点间的空间约束关系的基础上,针对差异不大的相近类别之间难以区分的问题再引入一个类间离散度度量函数,设计的f1(v)表达式下式所示:
[0140][0141]
其中,u
ti
是像素点x
i
对聚类中心v
t
的隶属度,w
ir
是以像素x
i
为中心大小为r
×
r的邻域窗,x
j
则为红外重构图像中心像素x
i
的邻域像素,m∈[1,∞)为平滑参数,是红外重构图像中的像素x
i
与聚类中心v
t
的高斯径向基相似度测量函数,度测量函数,是新的加权模糊因子,表示像素x
i
领域内第j个像素关于聚类中心v
t
的加权模糊因子,满足
其中空间距离约束ζ
dc
满足空间灰度约束ζ
gc
满足其中,表示像素x
j
的r
×
r邻域内所有像素点;
[0142]
m
i
的方差与均方的比值,ε
ij
为邻域像素点x
j
与中心像素点x
i
应均方差在核空间投影的值,即,常数2用以增强邻域像素点对中心像素点的抑制作用;η
t
为类间离散度参数,v
t
为聚类中心代表当前类别像素点的温度均值,为红外图像中所有像素点的温度均值,函数 f1(v)需要满足:利用拉格朗日乘数法求得像素x
i
相对于聚类中心v
t
的隶属度为
[0143][0144]
聚类中心v
t
更新公式为:
[0145][0146]
步骤s42、f2(v)为解决细节保留问题的单目标细节保留函数sgdr;考虑图像局部空间信息能进一步指导图像像素的分割,有利于解决边缘模糊的问题,并引入一个衡量像素位置及像素的颜色的相关系数m
ij
,构造细节保留函数f2(v)如下式所示:
[0147][0148]
其中,v
t
是聚类中心,u
ti
是像素点x
i
对聚类中心v
t
的隶属度,m∈[1,∞)为平滑参数,δ
i
表示局部空间信息,n
i
是以第i个像素为中心的邻域窗内像素的集合,
x
a
是n
i
里第a个像素,表示邻域像素x
i
与中心像素v
t
的相关性,记像素x
i
和v
t
的空间坐标分别为(x
im
,y
in
)、(v
tm
,v
tn
),灰度值分别为g(x
i
)、g(v
t
),则有λ
s
是空间尺度的影响因子,其中,λ
g
是灰度尺度影响因子,为以像素x
i
为中心的邻域像素的平均灰度方差,是邻域像素集合n
i
中的像素个数,函数f2(v)需要满足:利用拉格朗日乘数法求得像素x
i
相对于聚类中心v
t
的隶属度为
[0149][0150]
聚类中心v
t
的更新公式为:
[0151][0152]
步骤s43、f3(v)为解决边缘保持问题的单目标边缘保持函数soem;为了获得准确的分割结果,在目标函数中引入一个根据灰度级进行分割的边缘保持函数,并且为了加强边缘信息,引入了一个放大函数a
ti
放大邻域像素x
i
对中心像素v
t
隶属度的影响,构造边缘保持函数f3(v)如下式所示:
[0153][0154]
其中,n表示像素点的灰度值,u
ti
表示灰度值为n的像素点x
i
关于当前聚类中心v
t
的隶属度,m∈[1,∞)为平滑参数,u
n
为红外图像灰度级数目,n
n
为灰度值为n的像素点个数,为含有kn个像素点的低质图像中的像素点,n
i
是以像素x
i
为中心的邻域像素集合,是
集合n
i
中的像素点个数,g(x
i
)和g(x
j
)分别表示像素点x
i
和其邻域像素x
j
的灰度值,为邻域像素集合n
i
中的像素x
j
与中心像素x
i
的平均灰度差;函数f3(v)需要满足:利用拉格朗日乘数法求得像素x
i
相对于聚类中心v
t
的隶属度为
[0155][0156]
聚类中心v
t
的更新公式为:
[0157][0158]
由此完成了红外图像分割函数的构建。
[0159]
在上述技术方案中,所述步骤五设置的多目标优化问题如下式所示:
[0160]
minf(ν)=[f1(ν),f2(v),f3(v)]
t
[0161]
s.t v=(v1,
…
,v
c
)
t
[0162]
其中,c为分类数目,v=(v1,
…
,v
c
)
t
表示一组候选聚类中心,利用权重向量将多目标优化问题分解为若干个标量子问题,每个子问题的权重向量的分量能够反映每个目标函数对分割目标函数重要程度;
[0163]
多目标算法在像素点个数为kn的低质红外重构图像中求取各个目标函数的权重系数的具体步骤如下:
[0164]
步骤s51、多目标优化算法参数初始化,具体步骤包括:
[0165]
步骤s511、多目标优化的目标函数f(v),最大迭代次数g
max
,阈值ζ、ε;种群大小kn;每个邻域中权重向量的个数t;
[0166]
步骤s512、获取kn个均匀分布的权重向量:λ1,
…
,λ
kn
并计算每个权重向量最近的t个权重向量b(i)={i1,
…
,i
t
},i=1,
…
,kn,是λ
i
最近的t个权重向量;
[0167]
步骤s513、在满足多目标问题的可行空间中均匀采样产生初始种群 s1,
…
,s
kn
,令fv
i
=f(s
i
),i=1,
…
,kn;
[0168]
步骤s514、初始化f
*
=(f
1*
,f
2*
,f
3*
)
t
,满足其为图像分割多目标问题中的每个目标函数的最优值;
[0169]
步骤s515、采用基于切比雪夫的分解模型分解子问题,其中第j个子问题为:
[0170][0171]
上式中,是第j个子问题的权重向量,控制噪声抑制函数的权值,控制细节保留函数的权重,控制边缘保持函数的权重,f
1*
、 f
2*
和f
3*
分别三个函数当前的最优函数值;
[0172]
步骤s516、设置外部种群ep为空集;
[0173]
步骤s52、进行多目标优化算法更新;当小于最大迭代次数g
max
时,每迭代l次更新权重向量一次,即mod(g,l)=0时,先进入步骤s521更新种群中个体,再进行步骤s522调整权重向量,否则只进行步骤s521更新种群中的个体;
[0174]
步骤s521、更新种群中的个体,具体包括:
[0175]
步骤s5211、复制:从b(i)中随机选取两个序号k,l,运用差分进化算法由 s
k
,s
l
产生一个对于图像分割多目标问题新的解e;
[0176]
步骤s5212、改进:对e进行图像分割多目标优化问题中所提出的约束条件处理产生e
′
;
[0177]
步骤s5213、更新参考点f
*
,若参考点的数值f
*
<f
*
(e'),则f
*
=f
*
(e');
[0178]
步骤s5214、更新邻域解:根据tchebycheff的数学表达式若 g
te
(e'|λ
j
,f
*
)≤g
te
(s
j
|λ
j
,f
*
),j∈b(i),则s
j
=e
′
,,fv
i
=f(e
′
);
[0179]
步骤s522、调整权重向量,具体包括:
[0180]
步骤s5221、计算种群中的个体与其k个近邻的欧式距离和:
[0181][0182]
其中,为的k个近邻;
[0183]
步骤s5222、对sud大的n个个体进行更新操作,具体包括:
[0184]
步骤s52221、删除个体对应的权重向量λ
n
,插入新的权重向量λ
new
:
[0185][0186]
其中,λ
new
=(λ
new1
,λ
new2
,λ
new3
);
[0187]
步骤s52222、从权重向量λ
n
的邻域向量中随机找到两个权重向量λ
n1
和λ
n2
,并找到它们对应的个体和
[0188]
步骤s52223、在两个个体和之间随机生成一个新解
[0189]
[0190]
步骤s52224、生成新的个体作为新的聚类中心:以为中心,根据设置的三类目标函数对应的隶属度计算公式和聚类中心计算公式,计算当前隶属度:
[0191][0192]
根据当前隶属度计算新聚类中心:
[0193][0194]
步骤52225、用新的个体替换
[0195]
步骤s523、更新ep;移除所有被f(e
′
)支配的向量,若f(e
′
)不被ep里面向量所支配,把e
′
加入ep;
[0196]
步骤s53、终止迭代;若满足终止条件g=g
max
,输出ep得到最优即得到使图像分割多目标问题达到最优聚类中心集;否则增加迭代次数g=g+1转到步骤s52。
[0197]
在上述技术方案中,所述步骤六构建全像素红外图像分割目标函数的具体步骤包括:将步骤五求得的权重系数输入到双层分割模型的第二层,利用双层分割模型对重构得到的像素点个数为m
×
n的全像素红外图像进行图像分割;
[0198]
双层分割模型的第二层中,针对红外热图像的像素点个数为m
×
n的全像素图像有如下的优化函数:
[0199][0200]
在求解这个目标函数时,由于细节保留函数f2(v)中的分离性度量不含有像素x
i
关于聚类中心v
t
的隶属程度u
ti
,故将对以下函数做拉格朗日乘数法下的隶属度函数和聚类中心的求解:
[0201][0202]
则隶属度的更新公式为:
[0203][0204]
同时聚类中心的更新公式为:
[0205][0206]
全像素红外图像分割目标函数便构建完成。
[0207]
在上述技术方案中,所述步骤七在双层分割模型第二层实现红外全像素图像分割的具体步骤为:
[0208]
步骤s71、初始化迭代次数t,生成初始聚类中心并计算初始隶属度;
[0209]
步骤s72、计算当前迭代次数下的分割目标函数
[0210]
步骤s73、按照公式
[0211][0212]
更新隶属度;
[0213]
步骤s74、按照公式
[0214][0215]
更新聚类中心;
[0216]
步骤s75、计算更新后的目标函数
[0217]
步骤s76、若或t=t
max
,则分割算法结束,将像素点划分为隶属度值最大的那一类缺陷区域,得到分割后的图像,即最终对全像素的红外重构图像获取整幅观测图像的分割结果。
[0218]
综上,本发明提出了一种航空航天复合材料损伤可视化特征提取方法。变量区间搜索的自动分割方法是为了实现红外视频分割获得待分类数据集,数据集中包含了典型变化特征的温度曲线。fcm算法获得数据集相应的聚类,利用像素点与聚类中心的隶属度进行“软”划分,提高分类结果的可靠性。分类后的每一类数据子集中都含有相应的温度变化特征。利用主要特征对红外热图像序列进行重构由此获得缺陷的红外重构图像,反映出试件的缺陷特征。对于含有突出缺陷的红外重构图像进行目标分割获得的结果图像既能实现噪声消除又能保证细节保留,边缘保持也能提高图像分割的精度。
[0219]
实施例:
[0220]
在本实施例中,红外热像仪共采集了363帧像素大小为512
×
640的图像。即每张图上共有327680个温度点,每个温度点的温度值被记录363次,这种时变的温度条件构成了温度点的瞬态热响应ttr。步骤一在从红外热序列中提取有效瞬态热响应后,再对根据缺陷类型进行区域划分,从划分好的每类区域中,提取典型瞬态热响应。在提取有效瞬态热响应时,设置参数 re
cl
=0.92,从327680个温度点中提取了包含完整缺陷信息的375个有效瞬态热响应。根据像素点对每类聚类中心的隶属度进行软化分,将121,108和146条热响应曲线划分到相应分类。从每类缺陷区域中提取代表该类缺陷信息的典型瞬态热响应,代表三个缺陷区域的典型瞬态热响应构成矩阵x1。对原二维矩阵p(x,y)
363
×
327680
进行线性变换,使用其中,为x1的伪逆矩阵,得到二维图像矩阵o,将二维图像矩阵o再按行取值重构成原图像尺寸大小512
×
640的二维图像,得到 3张大小为512
×
640的红外重构图像,红外缺陷重构图像及对应的ttr曲线见图3~图8,其中图3和图4分别是撞击坑内部的ttr曲线和对应的红外重构图像,图5和图6分别
是撞击坑背景区域的ttr曲线和对应的红外重构图像,图7和图8分别是撞击坑边缘的ttr曲线和对应的红外重构图像。
[0221]
如图3、图5和图7所示分类出的ttr曲线可观察到不同分类的ttr在温度上升率和温度下降率都有不同的差异,可以根据差异以及红外重构图像颜色的凸显区域来判断重构图像中的表达区域类型,试件的区域类型有撞击坑内部、背景区域以及撞击坑边缘。
[0222]
本发明中多目标优化分割算法的最大代数设置为200,设置每迭代10 次基于个体稀疏度水平大小调整权重向量一次,调整权重向量在更新个体后再进行。在根据分割性能设置的目标函数中,设置平滑参数m为2,聚类数目 c为3。得到如图2所示的得到由帕累托最优集在空间上形成的曲面pf前沿面。从pf前沿面中选择权衡解,其对应的权重向量分量反映每个目标函数的权重系数,根据权重系数构建全像素红外图像分割目标函数模型,实现图像分割,得到分割后的图像如图9和图10所示,其中图9为撞击坑边缘红外重构图像的分割结果,图10为撞击坑内部红外重构图像的分割结果。实验结果证实本文构建的函数sgnsf1(v)、sgdrf2(v)和边缘保持函数soemf3(v)分别可以起到抑制噪声、保留细节和保持边缘的作用,将缺陷区域和背景区域准确剥离,实现红外图像的准确分割。
[0223]
这里说明的设备数量和处理规模是用来简化本发明的说明的。对本发明的应用、修改和变化对本领域的技术人员来说是显而易见的。
[0224]
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1