一种可用于超声图像采集教学任务的辅助系统
1.本发明属于医学超声图像采集领域,涉及到超声图像清晰度的评估方法,具体是一种可用于超声图像采集教学任务的辅助系统。
背景技术:
2.一般来讲,培养一个可以独立执行医学超声图像采集任务的超声科医生需要3
‑
5年时间,其主要原因为:1)医生需要学会识别各种器官对应的疾病;2)医生需要学会采集到满足一定清晰度需求的超声图像。在实际教学过程中,如何快速采集到清晰的超声图像不仅依赖于当前所使用的超声成像设备,同时更多的依赖于超声科医生的手法以及他们判断图像质量的经验。然而,判断图像质量需要医生花费大量时间来积累经验。同时,又由于影响图像质量的因素过多导致超声科医生在学习的初始阶段往往无法准确判断他每一步操作所得到的图像是否满足清晰度要求。因此,能够给超声科医生提供一种实时的图像质量评估方法可以有效提高学习效率,并帮助他们快速积累控制超声探头的经验。
3.综上,在培训超声医生的时需要依靠经验丰富的超声科医生不断的讲解来描述当前图像是满足质量标准的;同时,医生需要根据超声图像的清晰度来控制超声探头。因此,如果能给初学者提供实时的图像清晰度评估,则可以帮助他们快速积累控制超声探头的经验,从而提高教学效率。
技术实现要素:
4.本发明的目的在于提供一种可用于超声图像采集教学任务的辅助系统,本系统不同于其他超声辅助设备,其可以集成到原始的超声采集设备中,即可以根据实际需求只显示图像清晰度指标和可视化像素可信度,或者均不显示。
5.为实现上述目的,本发明采取的技术方案是:一种可用于超声图像采集教学任务的辅助系统,其包括如下模块:
6.特征提取模块,用于提取超声图像的区域梯度特征,将图像建模成二维ising点阵模型;
7.快速清晰度评估模块,用于将当前超声图像的清晰度进行快速量化;
8.像素级清晰度评估模块,用于计算当前超声图像每个像素的清晰度;
9.像素清晰度可视化模块,用于输出当前图像像素的清晰度值。
10.进一步的,所述特征提取模块将图像分割成相同大尺寸的cell,然后计算每个cell内像素的梯度直方图,通过计算每个cell与标准cell之间的余弦距离实现初始化;所述快速清晰度评估模块基于图像梯度方向和ising model建立图像清晰度快速评估模型,实现对图像清晰度的快速评估。
11.进一步的,将图像建模成二维ising点阵模型,首先需要提取图像的梯度信息,即梯度方向和梯度幅值,并将其融合成一个数值作为判断该像素自旋状态的依据;图像的梯度信息提取方法如下:
12.将图像均匀的划分成n个尺寸为5*8的cell,每个cell内有40个像素,在该区域内计算每个像素的梯度方向和梯度幅值;同时,将梯度的方向合并到(0
°
,180
°
)之间,并均匀的将180度分成6个bin;然后将每个cell内的40个像素特征表示成一个1*6的特征向量。
13.更进一步的,图像梯度信息的提取通过如下方式计算。
14.g
x
(x,y)=i(x+1,y)
‑
i(x
‑
1,y)
15.g
y
(x,y)=i(x,y+1)
‑
i(x,y
‑
1)
16.其中,g
x
(x,y),g
y
(x,y)分别表示图像水平方向的梯度和垂直方向的梯度,i(x,y)表示图像的像素值;
17.此外,图像中每个像素i(x,y)处的梯度幅值和梯度方向通过如下方式求解:
[0018][0019][0020]
其中,g
x
(x,y)表示图像的梯度幅值,α(x,y)表示像素的梯度方向。
[0021]
更进一步的,定义清晰图像区域的特征,并生成了一个标准的refefeature;通过比较每个cell的特征与refefeature之间的相似度实现对图像像素清晰度的初始化,具体通过计算每个cell的特征与refefeature之间的余弦夹角实现对超声图像清晰度评估的初始化,计算公式如下:
[0022][0023]
其中,initp表示初始化的像素清晰度指标,向量a表示从图像中提取的每个cell区域的梯度直方图,向量b=refefeature;、
[0024]
通过计算向量a和向量b的余弦夹角评估两个向量之间的相似性,并且将向量a和向量b的相似度全部赋值给cell中的像素,其中相似度越高,initp值越大,则该区域越亮;同时也表示该区域的像素越清晰,反之,则表示该区域像素处于模糊状态。
[0025]
更进一步的,根据在超声图像中提取的每个cell,以及对超声图像进行清晰度评估的初始化结果,得到对整幅图像的清晰度进行快速评估的公式:
[0026][0027]
其中,e表示对整张图像进行质量评估的量化结果,n
cell
表示被评估图像中cell的总数,w是超参数,为了平衡超声图像中那些没有像素的空白区域。cell(x,y)表示当前cell的位置,j表示自旋s
i
周围的其他自旋s
i
的状态。
[0028]
进一步的,所述像素级清晰度评估模块利用快速清晰度评估模块计算的图像清晰度评估指标和ising model的动态特征以及超声信号的衰减特性建立对图像像素清晰度评估模型。
[0029]
进一步的,建立像素级清晰度评估模型的方法如下:在系统中,设置一个表示一个像素的agent,并让这个agent从图像的每一列顶端向下移动,该agent每次向下移动一个像素,每次以该agent为中心在图像中选取一个尺寸为15*15的窗口,在这个窗口内使用ising model不断调整像素的状态,最终取这个窗口内像素的平均值作为该窗口中心像素的像素
值;
[0030]
更进一步的,求出每一个窗口内所有像素的初始平均值,记为:initavg,当像素值大于平均值的时候,定义状态为“清晰”;当图像像素值小于平均值时,定义状态为“模糊”。
[0031]
进一步的,所述像素清晰度可视化模块用于将快速清晰度评估模块和像素级清晰度评估模块计算的结果进行可视化;其中,快速清晰度评估模块的结果可将其以数字的形式实时显示在超声图像中;像素级清晰度评估模块的结果则可以设置自动显示或可以手动调整为关闭和开状态。
[0032]
本发明的有益效果是:本系统中,超声图像清晰度指标可以实时显示在超声图像中的某个位置,从而给医生提供实时参考;对于超声图像像素清晰度的可视化可以在进行采集超声图像教学任务时给老师和学生提供很大的帮助。
[0033]
另外,本发明可以在0.05s内完成对一张图像的快速评估,一次可以满足实时性的要求。
[0034]
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
[0035]
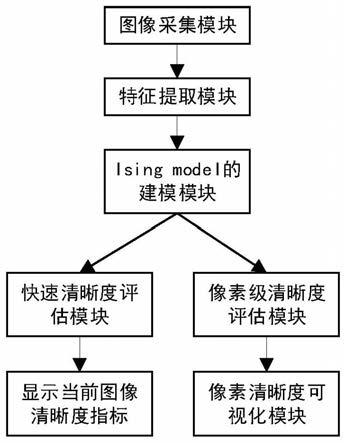
图1是医学超声检查教学任务辅助系统结构示意图;
[0036]
图2是本系统在超声教学过程中的工作机制;
[0037]
图3是数据集中的部分超声图像数据;
[0038]
图4是图像清晰度快速评估算法在胰腺长轴切面数据集上的评估结果;
[0039]
图5和图6是像素清晰度度可视化结果;
具体实施方式
[0040]
下面结合附图和具体实施例对本发明进行详细说明。
[0041]
如图1所示一种可用于超声图像采集教学任务的辅助系统,其包括特征提取模块、快速清晰度评估模块、像素级清晰度评估模块和像素清晰度可视化模块,其中特征提取模块用于提取超声图像的区域梯度特征,将图像建模成二维ising点阵模型;快速清晰度评估模块用于将当前超声图像的清晰度进行快速量化;像素级清晰度评估模块用于计算当前超声图像每个像素的清晰度;像素清晰度可视化模块用于输出当前图像像素的清晰度值。
[0042]
本发主要具有两大功能:即图像的全局清晰度快速评估和像素级清晰度评估。其中评估方法的框架是基于ising model和图像的梯度信息(梯度幅值和梯度方向),即我们需要根据图像的梯度信息将图像建模成一个满足二阶ising model的系统。
[0043]
实施例1:全局清晰度快速评估方法
[0044]
首先针对图像的全局清晰度评估方法,为了实现对图像进行实时快速评估,即把每张图像的时间成本压缩到0.05秒以内,这里仅利用ising model的静态特性。其中,ising model计算一个系统能量的公式如下:
[0045][0046]
原始二维ising model的自旋s
i
具有“up”和“down”两种状态,其中磁针自旋向上
为正,自旋向下为负。系统的每个自旋s
i
一般具有这两个状态,如公式2所示:
[0047][0048]
其中j是自旋之间相互作用的强度,h表示外部磁场的方向。其中下标<i,j>表示对所有与s
i
相邻的自旋进行求和。由于我们的期望是:系统的能量越低表示像素的清晰度越高,因此,我们控制外场的方向h=1,即当中心自旋s
i
的状态为“up”时,系统的能量是降低的。
[0049]
为了将图像建模成二维ising点阵模型,首先需要提取图像的梯度信息,即梯度方向和梯度幅值,并将其融合成一个数值作为判断该像素自旋状态的依据。图像的梯度信息提取方法如下:
[0050]
将图像均匀的划分成n个尺寸为5*8的cell,因此,每个cell内有40个像素。在该区域内计算每个像素的梯度方向和梯度幅值。同时,将梯度的方向合并到(0
°
,180
°
)之间,并均匀的将180度分成6个bin。至此,我们将每个cell内的40个像素特征表示成一个1*6的特征向量。
[0051]
首先,图像梯度信息的提取我们通过如下方式计算。
[0052]
g
x
(x,y)=i(x+1,y)
‑
i(x
‑
1,y)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0053]
g
y
(x,y)=i(x,y+1)
‑
i(x,y
‑
1)
ꢀꢀꢀꢀꢀꢀꢀ
(4)
[0054]
其中,g
x
(x,y),g
y
(x,y)分别表示图像水平方向的梯度和垂直方向的梯度,i(x,y)表示图像的像素值。
[0055]
此外,图像中每个像素i(x,y)处的梯度幅值和梯度方向通过如下方式求解:
[0056][0057][0058]
其中,公式(5)表示图像的梯度幅值,公式(6)表示像素的梯度方向。
[0059]
在我们的算法中,定义了清晰图像区域的特征,并生成了一个标准的refefeature。其中,不管是每个cell的特征,还是定义的refefeature都是1*6的向量。通过比较每个cell的特征与refefeature之间的相似度实现对图像像素清晰度的初始化。
[0060]
通过计算每个cell的特征与refefeature之间的余弦夹角实现对超声图像清晰度评估的初始化。计算公式如下:
[0061][0062]
其中,initp表示初始化的像素清晰度指标。向量a表示我们从图像中提取的每个cell区域的梯度直方图,向量b=refefeature。我们通过计算向量a和向量b的余弦夹角评估两个向量之间的相似性,并且将向量a和向量b的相似度全部赋值给cell中的像素。也就是说,初始化后的图像中,每个cell的像素都是相同的。其中相似度越高,initp值越大,则该区域越亮;同时也表示该区域的像素越清晰。反之,则表示该区域像素处于模糊状态。
[0063]
将图像建模成一个二维伊辛点阵模型(two
‑
dimensional square
‑
lattice ising model)。其主要方法和思想如下:
[0064]
根据在超声图像中提取的每个cell,并给出了对超声图像进行清晰度评估的初始化结果。在二阶ising model系统中,自旋的状态有两种:“up”和“down”。在该部分,为了将图像建模成一个二阶ising model,根据cell的initp设置其自旋s
i
的状态。根据经验得出的结论是:当initp大于0.7时,则可以保证该cell内像素的质量是清晰的;当initp小于0.5时,则可以认为该区域的图像无法给诊断提供参考。因此,我们让每个余弦夹角小于0.65的值变成负数,即表示自旋状态为“down”,而余弦夹角大于0.65时,则数值状态保持不变,即表示自旋状态为“up”。
[0065]
因此,可以把公式(2)改成如下形式:
[0066][0067]
因此,可以得到对整幅图像的清晰度进行快速评估的公式:
[0068][0069]
其中,e表示对整张图像进行质量评估的量化结果。n
cell
表示被评估图像中cell的总数,w是超参数,为了平衡超声图像中那些没有像素的空白区域。cell(x,y)表示当前cell的位置,j表示自旋s
i
周围的其他自旋s
i
的状态。
[0070]
至此,我们计算的e越大则图像越模糊。因此,为了让算法的计算结果更加符合人们的主观感受,需要公式(9)进行修改。
[0071][0072]
最终结果是:根据同一个设备采集的超声图像,分割出固定大小的超声图像,然后通过调整w将e的值稳定在(0
‑
1)之间。需要指出的是,w的大小可能需要根据不同型号的成像设备做出相应的调整。但是就目前而言,我们并没有对w做过第二次调整,也就是说,w的值也可能不会受到设备的影响。
[0073]
实施例2:像素级清晰度评估方法
[0074]
像素清晰度可视化不仅可以告诉我们该图像的全局清晰度,更可以直观的告诉我们图像中那个区域的像素质量高,哪个区域的像素质量低。建立像素级清晰度评估模型的方法如下:
[0075]
事实上,ising model常被用于描述一种动态系统的相变过程。在该部分,我们利用ising model的动态特性,即利用每个自选状态翻转导致的能量变化δe来控制自旋状态的翻转。同时,需要指出的是,超声波的基本特性之一是信号随着深度的增加而衰减,这也是导致超声图像在远场一般处于模糊状态的主要原因。因此,我们将其作为判断像素状态是否翻转的依据。
[0076]
在系统中,我们设置一个agent(agent表示一个像素),并让这个agent从图像的每一列顶端向下移动。该agent每次向下移动一个像素,每次以该agent为中心在图像中选取一个尺寸为15*15的窗口。我们在这个窗口内使用ising model不断调整像素的状态,最终取这个窗口内像素的平均值作为该窗口中心像素的像素值。
[0077]
与前面提到的快速评估算法不同之处在于可视化算法定义像素的状态方式不同,
同时可视化算法可以实时调整像素值的大小,从消除初始化过程中的一些误差。首先,我们需要求出每一个窗口内所有像素的初始平均值,记为:initavg,利用该平均值代替快速评估算法中的0.65(这一设置是基于超声图像的衰减特性而提出的)。当像素值大于平均值的时候,定义状态为“清晰”即自旋方向为“up”;当图像像素值小于平均值时,定义状态为“模糊”即自旋方向为“down”。因此,随着窗口的不断下移,我们判断像素是“模糊”和“清晰”的阈值initavg也会不断发生改变。
[0078]
该算法的一个理论前提是:在清晰的图像区域,黑色像素的数量少于白色像素;在模糊区域白色像素的数量少于黑色像素(在这一部分,黑色表示模糊,白色表示清晰)。如果我们通过ising model来调整该区域的像素值,当该区域的能量达到最小时,则该区域所有像素的状态可以表示当前像素的状态;反之,在模糊区域该理论也可以适用。简而言之,我们通过ising model消除了在不同区域内的噪声,同时,通过agent的移动让原本粗糙的像素变得更加光滑。需要提出的是,在该部分我们所说的黑色和白色是相对的。简单说明就是:在进场区域的黑色比远场区域的白色要亮。
[0079]
最后,需要给出可视化算法在每个窗口内利用δe调整每像素状态的方法。在窗口内计算其能量值的公式如下:
[0080][0081]
在该公式中,k(a)表示当前窗口内像素值小于平均值的像素数量,因为随着图像深度的不断加深,像素的平均值也会不断的减小。θ表示当前窗口内像素总数的一半。通过h(k(a)
‑
θ)控制系统的外部磁场方向,即我们希望外部磁场的方向是可变的,它总是与当前窗口内状态最多的方向相同,这样可以保证e处于能量最小值状态。通过该机制,可以有效的控制像素状态的改变。具体来讲:当窗口位于近场区域,此时图像的像素质量相对较好,窗口内黑色区域较少,而外部磁场方向与黑色区域的像素方向相反必然会导致系统能量增加。随着像素状态的不断变化,当能量趋于最小值时,则系统内的噪声点即被消除。同理,这个性质在图像底部的远场区域同样适应。
[0082]
换句话说,评估一个像素质量的好坏,是根据该像素周围环境(其他像素的状态)来决定的,这样做有两个好处:
[0083]
1)提高了判断的准确性。
[0084]
2)通过15*15的窗口在图像顶端自上而下滑动,每次向下滑动1个像素,可以有效的节省运算成本。
[0085]
针对每个像素状态的翻转,给出如下修改机制:
[0086][0087]
c
i
=g
i
exp(
‑
λl
i
)
ꢀꢀꢀꢀꢀ
(13)
[0088]
通过该公式,建立了像素状态的翻转规则和翻转后像素值的变化量与δe之间的关系。同时,我们将超声图像的衰减特性引入到对自旋/像素的修改机制中。其中g
i
是自旋/像素i处的图像强度,l
i
是从自旋i到图像顶端的标准化最近距离。当j=1时。α、β和λ是一个常数系数。δe
j
表示由于像素翻转状态和数值大小而引起系统能量e的变化量,其表达式如下:
[0089]
δe=e
j
‑
e
j
‑1ꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0090]
其中,当j=1时,即e0=e
init
,e
init
表示该窗口内的初始能量值。为了提高对窗口内像素状态的控制效率,我们提出如下机制:当(k(a)
‑
θ)<0时,表示该区域中大部分像素的状态是“清晰”。此时不管该窗口的中心像素i(x,y)状态是什么,部强制让该像素状态为“up”,然后计算该像素与其周围像素的能量值e。当(k(a)
‑
θ)>0时,表示该区域中大部分像素的状态是“模糊”。此时不管该窗口的中心像素i(x,y)状态是什么,部强制让该像素状态为“down”,然后计算该像素与其周围像素的能量值e。通过该机制调整该窗口内的每个像素的状态,直至系统趋于稳定,即δe的变化小于0.01。
[0091]
最后,当该区域的区域稳定是,当前像素i(x,y)的最终值为:
[0092][0093]
其中,m图像的总行数,i表示当前像素在像中位置的行数。
[0094]
我们分别在两台不同的超声设备上,通过控制超声探头与患者之间的接触力和角度,同时调整增益来获取不同器官的在不同位置的图像。本发明在这些数据的基础上进行验证,结果表明本发明设计清晰度评估算法可以有效的对图像清晰度进行实时跟踪。
[0095]
综上,本发明具有两大功能:1)对图像清晰度进行快速评估,指标在(0,1)之内数值越大图像越清晰,每张图像计算时间小于0.06秒满足实时性要求。2)对当前图像进行像素级质量评估,可以直接对当前图像中不同区域的像素清晰度进行可视化,亮度越高表示越清晰。
[0096]
以上显示和描述了本发明的基本原理、主要特征和优点。本领域的普通技术人员应该了解,上述实施例不以任何形式限制本发明的保护范围,凡采用等同替换等方式所获得的技术方案,均落于本发明的保护范围内。
[0097]
本发明未涉及部分均与现有技术相同或可采用现有技术加以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1