车辆内部的密钥卡定位的制作方法
1.本公开大体上涉及超宽带(uwb)测距技术,且更具体地,涉及实施机器学习和uwb技术的组合以确定密钥卡在车辆内部的位置。
背景技术:
2.密钥卡通常用于为汽车、卡车、船等现代车辆提供无钥匙进入。例如,密钥卡可以远程传输电子信号,以在用户靠近时命令车辆锁定或解锁车门、激活点火器以启动引擎等。
3.在无线电子通信收发器中实施超宽带(uwb)技术,因为与其它无线技术相比,尤其是与那些包括物联网(iot)装置的无线技术相比,uwb技术具有卓越的定位精度和高数据吞吐量。一种应用包括在密钥卡、智能手机或其它远程移动电子装置中实施uwb计算机芯片,用于通过安装在汽车中的一个或多个天线锚来进行远程数字访问并控制车辆的计算机处理器,从而锁定或解锁车门或用于其它远程功能。例如,当密钥卡在车辆驾驶员身上时,车辆可以检测例如驾驶员接近车辆或拉动门把手的活动,并且开始在车舱外部搜索密钥卡。一旦密钥卡通过认证,门就会自动解锁。
4.现代远程无钥匙车辆的特征是,当密钥卡在车辆内部时防止车辆自身自动锁定。然而,uwb密钥卡在车舱内部的定位会是一个挑战。具体地,uwb无线电装置执行距离估计算法,例如toa、飞行时间(tof)、到达时间差(tdoa)、到达角度(aoa)等,这可能会容易发生由环境条件或与密钥卡共存于车舱内部的人、动物、行李箱或其它物体而引起的错误和误算。
技术实现要素:
5.根据本发明的一个方面,提供一种用于定位超宽带(uwb)设备的系统,包括:uwb收发器,所述uwb收发器标识并提取至少一个信道脉冲响应(cir)的特征;以及专用处理器,所述专用处理器将机器学习分类过程应用于提取的cir特征,以在车辆中定位所述uwb设备。
6.根据一个或多个实施例,所述uwb设备是密钥卡。
7.根据一个或多个实施例,所述uwb收发器包括cir特征处理器,所述cir特征处理器提取所述至少一个cir的所述特征,用于通过所述机器学习分类过程进行分析和后续处理。
8.根据一个或多个实施例,机器学习计算机区分所需的所述至少一个cir中的反射用于识别在所述车辆的密集多路径环境中的第一路径。
9.根据一个或多个实施例,所述cir特征处理器进一步标准化、滤波和或标记所述至少一个cir。
10.根据一个或多个实施例,所述uwb收发器包括:
11.天线;
12.测距处理器,所述测距处理器根据由所述天线从所述uwb设备接收到的uwb信号生成所述至少一个cir;以及
13.信号检测器,所述信号检测器检测并量化由所述uwb收发器接收到的所述uwb信号。
14.根据一个或多个实施例,所述uwb收发器包括外壳,并且所述专用处理器装入所述外壳中。
15.根据一个或多个实施例,所述专用处理器将所述机器学习分类过程的单个分类器应用于所述提取的cir特征。
16.根据一个或多个实施例,所述专用处理器被构造和布置成接收并处理关于所述uwb设备的距离数据,用于训练所述机器学习分类过程以区分所述uwb设备在所述车辆内部的位置。
17.根据本发明的第二方面,提供一种超宽带(uwb)无线通信系统,包括:
18.密钥卡,所述密钥卡输出uwb信号;
19.至少一个锚装置,所述至少一个锚装置与所述密钥卡一起参与测距序列,所述测距序列包括根据所述uwb信号生成至少一个信道脉冲响应(cir)并且提取所述至少一个cir的特征;以及
20.专用处理器,所述专用处理器将机器学习分类过程应用于提取的cir特征,以定位所述密钥卡。
21.根据一个或多个实施例,至少一个锚包括多个锚装置,每一锚装置存储并处理关于所述cir特征的所述机器学习分类过程的分类器。
22.根据一个或多个实施例,所述机器学习分类过程选择所述cir特征以训练所述分类器。
23.根据一个或多个实施例,所述机器学习分类过程执行训练算法,返回用于所述分类器的模型作为输出,所述分类器用于对所述cir特征的数据进行分类。
24.根据一个或多个实施例,机器学习计算机区分所需的所述至少一个cir中的反射用于在所述车辆的密集多路径环境中标识第一路径。
25.根据一个或多个实施例,所述至少一个锚装置包括:
26.天线;
27.测距处理器,所述测距处理器根据由所述天线接收到的uwb信号生成所述至少一个cir;
28.信号检测器,所述信号检测器检测并量化由所述uwb收发器接收到的所述uwb信号;以及
29.cir特征处理器,所述cir特征处理器提取所述至少一个cir的所述特征。
30.根据一个或多个实施例,所述至少一个锚装置包括外壳,并且所述专用处理器装入所述外壳中。
31.根据本发明的另一个实施例,提供一种用于定位超宽带(uwb)设备的方法,包括:
32.从所述uwb设备向uwb收发器输出uwb信号;
33.由所述uwb收发器提取所述uwb信号的至少一个信道脉冲响应(cir)的特征;以及
34.由专用处理器将机器学习分类过程应用于提取的cir特征,以在车辆中定位所述uwb设备。
35.根据一个或多个实施例,另外包括:
36.处理所述cir以区分所述uwb信号的所述cir中的反射;以及
37.在所述uwb设备的密集多路径环境中标识第一路径。
38.根据一个或多个实施例,处理所述cir另外包括生成用于所述机器学习分类过程的数据,并且其中所述机器学习分类过程执行训练算法以返回用于对所述cir特征进行分类的所述机器学习分类过程的分类器的模型。
39.根据一个或多个实施例,所述机器学习分类过程估计所述uwb设备在车舱中的位置。
附图说明
40.本发明通过举例示出且不受附图的限制,在附图中,类似标记指示类似元件。为了简单和清晰起见而示出图中的元件,并且这些元件不一定按比例绘制。
41.图1是示出在实践本发明概念的实施例的环境中产生的信道脉冲响应(cir)的曲线图。
42.图2是示出在实践本发明概念的实施例的密集多路径环境中产生的信道脉冲响应的曲线图。
43.图3是根据一些实施例的在车辆中实施的超宽带(uwb)测距系统的示意性视图。
44.图4是根据一些实施例的uwb通信系统的框图。
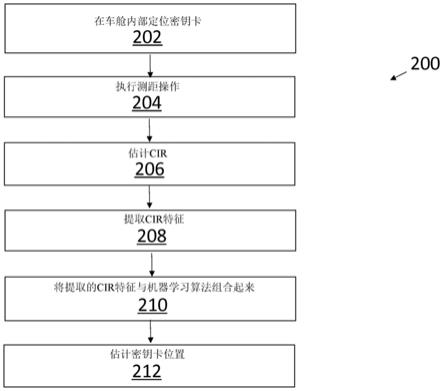
45.图5是示出根据一些实施例的用于在车舱内部定位密钥卡的方法的流程图。
46.图6是示出根据一些实施例的用于训练机器学习分类算法以定位密钥卡的方法的流程图。
47.图7是示出根据图6的机器学习技术选择用于进行预处理的cir的特征的曲线图。
具体实施方式
48.uwb无线电装置通常需要cir信号测量来估计信号何时到达接收器。从根据ieee 802.15.4a标准计算出的交叉相关函数来确定测量的cir,所述交叉相关函数即在数据包前导码上的接收到的脉冲序列信号与基准或预期脉冲之间的比较。一旦获得,就使用所述cir来估计传输与接收uwb无线电装置之间的第一路径的时刻。图1和2的曲线图中所示的例子示出用于环境的cir,所述环境具有不多的反射和第二路径,所述第二路径可清楚地与第一路径区分开且还可能标识另外的反射。
49.然而,关于由uwb无线电装置使用的相关环境条件包括:例如当尝试在车舱内部定位密钥卡时存在“密集多路径”环境,其中车辆检测例如用户尝试通过拉动门把手而打开车门的活动,并且作为响应,所述车辆开始搜索密钥卡。参考图2,在密集多路径环境中,可能会难以区分cir包含的反射。具体地,当处理距离和位置估计中的一些错误时,传统的搜索和距离估计算法或定位算法通常不足以用于在存在密集多路径条件的情况下检测直接路径信号,因为所述算法注重从uwb装置采集距离信息且必须考虑沿uwb传输器与接收器之间的视距(los)路径的表面上的信号(例如,射频(rf))反射、散射等,这可能会产生干扰,且因此在接收器天线处产生信号失真。多路径产生不正确的到达时间(toa)估计,且因此产生错误距离和位置估计。尽管如此,可以执行cir信号数据的分析计算,但在考虑密集多路径cir时可能会影响传输与接收uwb无线电装置之间的距离估计计算的准确性。因此,一些“密集多路径”环境对使用uwb装置进行的定位非常不利。
50.简而言之,本发明概念的实施例将计算机执行的机器学习过程与测得的cir的特
征组合起来,而不是在尽管存在密集多路径环境的情况下依赖于仅距离信息来估计密钥卡或相关uwb设备在车辆内部的位置。在优选实施例中,提供了一种机器学习技术,所述机器学习技术包括分类算法,用于估计密钥卡在车舱或易受密集多路径条件影响的其它封闭区域中的位置。机器学习方法识别到cir具有特性或特征,如图1和2所示,这将所述cir标识为相对于车舱内部的各个位置来说是唯一的。与深度学习技术的复杂性和基本上大量的处理需求不同,机器学习技术识别到不可能估计密钥卡的确切坐标,而是要依赖于信号的特性来标识位置,尽管除了标识密钥卡附近存在物体、人等之外没有x
‑
y坐标确定。例如,执行机器学习算法,所述算法从定义的特定cir特征中学习,并继续基于学习的cir特征数据为分类算法进行学习或训练。同样,由于计算性能需求比深度学习算法要少,因此可以在uwb锚处执行简单的机器学习模型。机器学习算法准许选择cir特征来训练分类器。以此方式,标识特征的计算复杂性与所需精确性之间的折衷以减少计算需求是可能的。因此,尽管车辆中可能存在各种障碍物,例如人体,但分类算法在执行时可以被训练成标识密钥卡是否在乘客座椅、驾驶员座椅、汽车底板、后备箱、引擎等上。另一特征是车辆中的每个uwb锚需要单个分类器,且因此,锚更少且复杂性更低。与深度学习算法相比的另一优点是机器学习算法的实施例处理用于训练算法的cir特征或特性。
51.在一些实施例中,包括例如密钥卡、锚和机器语言计算机(未示出)的uwb收发器的定位系统可以交换数据以处理来自cir的cir数据和机器语言导出的数据的组合,例如用于导出uwb收发器与锚之间的距离的精确估计。距离数据可以用于训练机器语言,并且从cir导出数据。处理定位确定的决策可以基于两个输入,即cir和机器语言导出的cir数据。例如,“混合”系统可以因此处理来自cir的cir数据和机器语言导出的数据以及来自一个或多个锚的距离数据的组合。系统可以处理两个输入,以消除基于cir的仅距离确定的任何不明确性。
52.图3是根据一些实施例的在车辆中实施的超宽带(uwb)测距系统的示意性视图。
53.密钥卡102测距启动器设备位于车辆12内部,例如汽车、卡车、飞机或船的座舱、驾驶舱、机上厨房,但不限于此。密钥卡102通常是便携式的且包括传输器,所述传输器例如通过按键、语音或其它激活机构激活,用于将命令发送到一个或多个车载收发器104a、104b(通常为104)以执行人们熟知的功能,例如与各种传感器15和相关联的机构和车载计算机通信以用于解锁门、启动车辆引擎等。收发器104例如可以在车辆12内部和外部,且可以包括在车辆的各种位置处的外部天线,所述位置例如门把手、镜子、后备箱、保险杠、车顶、仪表盘等。如本文中所描述,包括密钥卡102、车载收发器104和机器学习系统148的系统即使在密集多路径环境中也可以在车辆12内部定位密钥卡102,并且可以因此用于与远程无钥匙进入、远程引擎启动、远程锁门/解锁门等相关的应用中。
54.例如,当例如通过传感器15检测到门把手已经被触摸而触发车辆时,信号从天线传输到密钥,在随后的认证方案中,车辆可以自动解锁。在一些实施例中,收发器104是uwb锚,所述uwb锚在预定uwb频带处与密钥卡102交换数据,所述预定uwb频带提供相当大的通信范围,例如高达数百英尺或更大。在一些实施例中,uwb收发器104等符合ieee 802.15.4系统,所述uwb收发器104通常传输500mhz或1ghz的脉冲,但不限于此。
55.车辆12还可以包括车身控制模块(bcm)106或用于各种传感器15或车载计算机等的相关电子控制单元,用于控制车身中的例如门锁、点火系统、电动车窗、灯、空调单元等电
子配件。车辆12可以包括数据总线(未示出)和/或其它网络装置,用于准许bcm 106、传感器15、车载计算机(未示出)、作用式继电器(未示出)与密钥卡102之间的数据交换。
56.图4是根据一些实施例的uwb通信系统10的框图。在一些实施例中,uwb通信系统10符合ieee 802.15.4技术标准,ieee 802.15.4技术标准以全文引用的方式并入本文中。如图所示,密钥卡102和车载uwb收发器104通过统称为通信路径或链路的一个或多个传输信道110交换数据。uwb通信系统10的实施例可以在图3的密钥卡102、uwb收发器104、bcm 106和/或传感器15中实施。
57.密钥卡102,也称为第一uwb无线收发器,可以包括全向天线121和相应处理器,用于使用作为测距启动器的技术来传输数据,所述测距启动器使得无线电能量在传输信道110的uwb频带上扩散。在一些实施例中,密钥卡102和/或车载uwb收发器104包括收发器电路系统以及检测和量化uwb信号的相关联天线141。
58.车载uwb收发器104,也称为响应器设备或第二uwb无线收发器,用作天线锚或相关装置,检测由密钥卡102发射的uwb脉冲或相关信号并将所述uwb脉冲或相关信号转发到bcm 110或其它车载车辆计算机、位置传感器等,以用于计算密钥卡102的位置。与密钥卡102进行交换且通过传输信道110输出的信号是测距操作的一部分,在系统10的uwb设备102、104之间精确地提供空间感知和相对定位。
59.为了检测从密钥卡102接收到的信号并对所述信号进行解调和/或解码,uwb收发器104还包括天线141,所述天线141通过传输信道110检测并量化uwb信号,并且生成用于定位密钥卡102的信号。在一些实施例中,天线141可以与用于执行uwb信号交换的密钥卡102的天线121类似或相同。天线141可以与信号检测器142通信,所述信号检测器142可以是射频(rf)子系统或相关模拟前端的一部分。模拟域中的信号检测器142可以包括用于与测距处理器144等进行电子通信的模数转换器(adc)和数模转换器(dac)。例如,信号检测器142通过天线141检测并量化由uwb收发器104接收到的信号,例如能级、功率谱密度等。更具体地,测距处理器144优选地被构造和布置成检测并放大uwb信号,并且根据uwb信号生成至少一个cir。在这样做时,测距处理器144可以是基带子系统等的一部分,用于执行数字接收器算法以执行toa测量或相关距离测定或测距序列计算。
60.在一些实施例中,uwb收发器104包括cir特征处理器146,所述cir特征处理器146提取cir的特征以用于通过机器学习分类算法分析滤波后的cir并进行后续处理,所述机器学习分类算法例如由机器学习计算机148执行,例如以区分在原本的密集多路径环境中标识第一路径所需的cir信号中的反射。在一些实施例中,机器学习计算机148包括在uwb收发器104的壳体或外壳143内的用于执行一些或全部机器学习算法的专用硬件处理器。机器学习代码存储在收发器104的机器学习计算机148的存储器处且由所述机器学习计算机148的硬件计算机处理器执行。在其它实施例中,cir特征处理器146是以电子方式与uwb收发器104通信以接收和处理cir数据的远程专用计算机的一部分。在其它实施例中,机器学习计算机148可以远离uwb收发器104并且与cir特征处理器146通信。此处,机器学习算法的一些部分可以在cir特征处理器146中执行,并且机器学习算法的其它部分在远程机器学习计算机处执行。在机器学习计算机148容纳在uwb收发器104处或以其它方式作为uwb收发器104的一部分的实施例中,针对用作uwb锚的每一收发器104执行单个机器学习分类器,以在节点处对感兴趣的cir特征进行分类。在单个分类器用于多个锚的实施例中,机器学习计算机
148与锚分离,使得单个分类器与其所连接的每一个锚交换决策数据等。
61.图5是示出根据一些实施例的用于在车舱内部定位密钥卡的方法200的流程图。在描述方法200时,参考图3和4的uwb通信系统10的一些或全部元件。因此,方法200的一些或全部步骤可以由图3和4的uwb通信系统10的元件执行。
62.在框202,密钥卡102在汽车、飞机、船或其它车辆的座舱、驾驶舱、机上厨房或其它封闭或部分封闭的区内部,所述其它车辆具有可以在座舱或相关外壳内部的uwb收发器104处产生干扰或其它信号失真的反射表面。密钥卡102可以定位在特定区中,所述特定区例如车舱或相关外壳的座椅、底板、仪表盘等。
63.在框204,执行测距操作。在一些实施例中,在测距操作之前或在测距操作中,启动过程由密钥卡102、收发器104和/或第三方或介入设备执行。出于描述方法200的目的,参考密钥卡102,尽管方法200可以同样适用于收发器104。例如,参考图3,启动例程可以存储在密钥卡102的存储器中,但不限于此,使得密钥卡102的处理器可以执行存储的例程,所述例程可以包括一连串指令,例如用于清除设备102的高速缓存以使密钥卡102处于可操作状态。密钥卡102被预配置,例如通过软件程序进行预编程,以便以产生uwb装置的可能的最佳性能的方式实现全部装置性能。例如,密钥卡102可以被配置成用于例如符合ieee 802.15.4标准的参数,以允许启动器设备102和收发器104进行通信。当执行测距操作时,在用于定位和位置跟踪应用等的密钥卡102与收发器104之间例如确定距离测量,例如toa、飞行时间(tof)、到达时间差(tdoa)、到达角度(aoa)等。
64.在框206,估计一个或多个cir。例如,再次参考图1
‑
图3,可以在密钥卡102相对于汽车12处的收发器104的一个或多个位置处测量cir。估计的cir包括在框208可以由系统10从cir提取的与位置相关的特征或特性,所述系统10例如用于进行后续处理的uwb收发器104的cir特征处理器146。
65.在框210,提供机器学习算法以分析根据cir测得的距离,并且还将分析的距离与从cir提取的特征组合起来。具体地,机器学习有助于在车舱内部定位密钥卡。在这样做时,可以在硬件和/或软件中实施监督学习算法,所述算法在训练期间标识密钥卡102的位置。处理至少一个cir以生成用于分类算法的数据。cir产生“信道”的特性,并且所述cir可以被分析以确定反射的次数、它们(在时间和空间上)有多接近、反射的强度和它们在接收器104处是如何组合的。由于要接收的来自传输器的信号路径可能会与传输器和接收器的不同位置有很大不同,因此cir“指纹”可以不同于许多位置。机器学习算法将能够从cir提取特征,并使用监督学习来“学习”cir在位置之间是如何变化的,并且使用cir特性来执行定位。与深度学习算法不同,cir特征提取机器学习算法并不包括大量算法层,所述算法层中每一算法提供对其处理的数据的不同解释,并且算法层布置在复杂的处理器密集型网络中。因此,与多层深度学习算法必需的较大处理需求相比,执行cir特征提取机器学习算法所需的较小处理需求是必需的。
66.在一些实施例中,框210包括标识可适用且可实际执行的分类算法。选择的分类算法接收cir特征作为输入,并且在框212生成密钥卡的估计位置作为输出。具体地,响应于cir特征提取和机器学习处理的组合而在车内环境中定位密钥卡。示例分类算法可以包括但不限于神经网络、支持向量机(svm)、线性判别、决策树、k
‑
最邻近法(knn)等。例如,knn可以应用于cir特征、估计距离和各种位置相关的测量的数据集,并且可以在cir测量输入到
此分类算法的新数据集中估计密钥卡在车辆内部的位置,所述分类算法又输出位置估计。
67.图6是示出根据一些实施例的用于训练机器学习分类算法以定位密钥卡的方法300的流程图。在描述机器学习技术300时,参考图3和4的uwb通信系统10的一些或全部元件。因此,方法300的一些或全部步骤可以由图3和4的uwb通信系统10的元件执行。
68.方法300的框302
‑
306可以是预处理功能的一部分,其中以机器学习算法的训练数据集和测试数据集排列数据。此处,cir特征例如由uwb锚104的cir特征处理器146提取、标准化、滤波和标记。框308
‑
314可以是学习功能的一部分。例如模型评估和预测的其它机器学习步骤可以遵循方法300。
69.具体地,在框302,获得至少一个cir。例如,可以分别针对图3和4中所示的密钥卡102与uwb锚104之间的数据交换计算cir。例如,作为测距序列的一部分,从例如密钥卡102的测距启动器设备输出包括uwb前导码的消息,并且由例如uwb锚104的响应器设备接收所述消息,所述响应器设备处理前导码以生成cir。
70.在框304,可以对cir进行滤波以降低与后续提取步骤306相关联的复杂性。例如,可以对图1中的相关区1或图2中的相关区2外部的cir部分进行滤波,使得提取相关区1、2的内容,例如峰值、前缘、能级等。
71.在框306,提取cir的特征,包括对滤波后的cir进行标识和分析,并且执行时域或频域中的数学运算。标识和提取的特征可以包括但不限于cir中的峰值数,第一路径峰值/最大峰值比率,第一路径峰值,最大峰值距离、宽度和/或突出程度,cir能量,cir谱功率,第一路径峰值偏度和峰度。图7示出了特征的曲线图,包括在预处理步骤中提取的第一路径突起程度(a)、宽度(b)和峰值数(c)。在一些实施例中,特征可以包括估计距离。不管估计距离是否准确,机器学习分类算法都可以用估计距离进行训练等。在一些实施例中,标记cir特征以用足以使机器学习算法学习和处理识别的标记,并且根据其通过标记学到的每一特征对其它cir数据进行分类的方式来定位密钥卡。
72.应用于提取的cir特征的机器学习算法不需要结构化或标记数据来对cir进行分类。例如,实施例包括生成结构化数据以使机器学习算法学习例如用于训练的标记数据。如本文中所描述的,分类器可以根据其通过标记学到的特征对密钥卡数据进行分类。这与依赖于过程密集型深度学习算法以通过分级网络的不同层输出其数据输入的复杂多层网络应用不同。
73.在决策菱形框308,确定分类算法是否经过了训练。在一些实施例中,执行监督学习,其中所述算法在训练期间识别密钥卡位置,并且如先前在框304和框306中所描述的,处理所述cir以生成用于分类算法的数据。此处,监督学习要求已知算法的可能输出,并且用于训练算法的cir数据已被标记。
74.在一些实施例中,必须为分类算法生成模型,且因此执行训练步骤(框310),然后进行模型生成过程(框312)。一旦生成模型,分类器就可以输出标记作为新数据的一部分。在其它实施例中,训练算法在已指定位置的情况下(从框306)接收标记的特征作为输入,并且返回用于选择的分类器的模型作为输出,所述分类器用于对数据进行分类(框314)。应用于提取的cir特征的示例分类器可以包括但不限于支持向量机、k最邻近法(knn)、朴素贝叶斯、决策树、随机森林、神经网络等。在一些实施例中,在模型训练/学习算法过程之后,针对作为上述预处理步骤的一部分提供的、并且作为模型评估过程的一部分直接输入到模型的
测试数据集来评估模型。
75.根据本发明概念的实施例的方法300中的学习步骤的另一特征是,选择较少的分类器进行初始测试,且因此,需要较少的uwb锚104。在一些实施例中,一个锚可以从其它锚收集数据,接着在代表性锚处局部地执行机器学习算法。代表性锚然后又可以向bcm 106或其它汽车控制处理器输出请求信号等,以解锁车门等。与深度学习算法的复杂决策运作相比,可以较低的复杂性和较高的简单性来实施决策树或其它机器语言程序,所述复杂决策运作因此可以在特定的uwb锚104处进行处理。因此,在通过单个锚分类器在每一单独锚处作出决策的情况下,可以采取决策。
76.如应了解,如所公开的实施例包括至少以下内容。在一个实施例中,一种用于定位超宽带(uwb)设备的系统包括:uwb收发器,所述uwb收发器标识并提取至少一个信道脉冲响应(cir)的特征;以及专用处理器,所述专用处理器将机器学习分类过程应用于提取的cir特征,以在车辆中定位所述uwb设备。
77.所述系统的可替换实施例包括以下特征之一或其任何组合。所述uwb设备是密钥卡。所述uwb收发器包括cir特征处理器,所述cir特征处理器提取所述cir的所述特征,用于通过所述机器学习分类过程进行分析和后续处理。机器学习计算机区分在所述车辆的密集多路径环境中标识第一路径所需的所述cir中的反射。所述cir特征处理器在由所述系统执行的过程的分类阶段中进一步标准化、过滤和或标记所述cir。所述uwb收发器包括:天线;测距处理器,所述测距处理器根据由所述天线从所述uwb设备接收到的uwb信号生成所述cir;以及信号检测器,所述信号检测器检测并量化由所述uwb收发器接收到的所述uwb信号。所述uwb收发器包括外壳,并且所述专用处理器装入所述外壳中。所述专用处理器将所述机器学习分类过程的单个分类器应用于所述提取的cir特征。所述专用处理器被构造和布置成接收并处理关于所述uwb设备的距离数据,用于训练所述机器学习分类过程以区分所述uwb设备在所述车辆内部的位置。
78.在另一实施例中,一种超宽带(uwb)无线通信系统包括:密钥卡,所述密钥卡输出uwb信号;至少一个锚,所述至少一个锚与所述密钥卡一起参与测距序列,所述测距序列包括根据所述uwb信号生成至少一个信道脉冲响应(cir)并且提取所述至少一个cir的特征;以及专用处理器,所述专用处理器将机器学习分类过程应用于提取的cir特征,以定位所述密钥卡。
79.所述系统的可替换实施例包括以下特征之一或其任何组合。所述至少一个锚包括多个锚装置,每一锚装置存储并处理关于所述cir特征的所述机器学习分类过程的分类器。所述机器学习分类过程选择所述cir特征以训练所述分类器。所述机器学习分类过程执行训练算法,返回用于所述分类器的模型作为输出,所述分类器用于对所述cir特征的数据进行分类。机器学习计算机区分在所述车辆的密集多路径环境中标识第一路径所需的所述至少一个cir中的反射。所述至少一个锚固件装置包括:天线;测距处理器,所述测距处理器根据由所述天线接收到的uwb信号生成所述至少一个cir;信号检测器,所述信号检测器检测并量化由所述uwb收发器接收到的所述uwb信号;以及cir特征处理器,所述cir特征处理器提取所述至少一个cir的所述特征。至少一个锚装置包括外壳,并且所述专用处理器装入所述外壳中。
80.在另一实施例中,一种用于定位超宽带(uwb)设备的方法包括:从所述uwb设备向
uwb收发器输出uwb信号;由所述uwb收发器提取所述uwb信号的至少一个信道脉冲响应(cir)的特征;以及由专用处理器将机器学习分类过程应用于提取的cir特征,以在车辆中定位所述uwb设备。
81.所述系统的可替换实施例包括以下特征之一或其任何组合。所述方法另外包括:处理所述cir以区分所述uwb信号的所述cir中的反射;以及在所述uwb设备的密集多路径环境中标识第一路径。处理所述cir另外包括生成用于所述机器学习分类过程的数据。所述机器学习分类过程执行训练算法,以返回用于对所述cir特征进行分类的所述机器学习分类过程的分类器的模型。所述机器学习分类过程估计所述uwb设备在车舱中的位置。
82.虽然本文中参考具体实施例描述了本发明,但是可以在不脱离如所附权利要求书中所阐述的本发明的范围的情况下进行各种修改和改变。因此,说明书和图式应视为说明性而非具有限制性意义,并且预期所有此类修改都包括在本发明的范围内。并不意图将本文中关于具体实施例所描述的任何优势、优点或针对问题的解决方案理解为任何或所有权利要求的关键、必需或必不可少的特征或元件。
83.除非另有陈述,否则例如“第一”和“第二”等术语用于任意地区别此类术语所描述的元件。因此,这些术语不一定意图指示此类元件时间上的优先级或其它优先级。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1