一种基于G-AKAZE的图像特征匹配算法
[0011][0012]
式中,i表示计数参数,j表示为计数参数,τ
j
表示为对应步长,a(l
i
)表示为图像li的传导矩阵,n表示显性扩散步数,τ
max
表示满足显性扩散稳定性条件时的最大步长值。在整个循环过程中,矩阵a(l
i
)始终保持不变,当循环结束后,算法将重新计算矩阵a(l
i
)的值。寻找不同尺度归一化后的hessian矩阵极大值,确定hessian矩阵h:
[0013][0014]
式中,f表示为定义域内二阶连续可导多元函数,x1、x2、
…
、x
n
表示函数中的自变量参数。
[0015]
(3)确定特征点主方向:
[0016]
利用m
‑
ldb描述符对图像进行描述,通过离散点采样获得散点的亮度值和水平方向和垂直方向的微分平均值,获得的运算符是由0和1构成的二值描述符,对图像分割网格像素,对网格像素进行尺度自适应,比例采样后进行求取平均值操作,确定特征点的主方向。
[0017]
(4)特征点匹配:
[0018][0019]
式中,a和b分别表示对应特征点描述符,m
i
表示描述符a中的第一位,n
i
表示描述符b中的第一位,d表示a和b描述符中的位数,表示描述符进行异或运算。
[0020]
(5)确定统计区域内点的支持可能性p
t
和p
f
:
[0021][0022][0023]
式中,p
t
表示当x
i
正确时,同匹配统计区域里的点支持它的可能性,p
f
表示当x
i
错误时,同匹配统计区域里的点支持它的可能性。f
a
表示在a区域中的一个支持点,表示f
a
的匹配是正确的,表示f
a
的匹配是错误的,表示a区域中的支持点f
a
正好匹配到b区域中,β表示比例系数,m表示b区域中点的个数,m表示整个图像包含的点个数。
[0024]
(6)确定x
i
正确和错误时的均值和方差:
[0025]
[0026][0027]
式中,m
t
表示x
i
正确时的均值,s
t
表示x
i
正确时的方差,m
f
表示x
i
错误时的均值,s
f
表示x
i
错误时的方差,kn表示该匹配点的均值。
[0028]
(7)确定图像网格间的判断阈值λ:
[0029][0030]
式中,α为常数,表示比例系数。
[0031]
本发明比现有技术具有的优点:
[0032]
(1)该发明通过引入误匹配剔除算法,保证了在误匹配识别精度提升的前提下,更加快速高效的进行误匹配点的剔除,大大提升了图像匹配的精确度。
[0033]
(2)该发明改善了传统图像匹配过程中,由于背景噪声干扰和图像畸变所产生的匹配差异问题,有效的解决了背景噪声和图像尺度改变的影响,提升了图像匹配的精确度。
附图说明
[0034]
为了更好地理解本发明,下面结合附图作进一步的说明。
[0035]
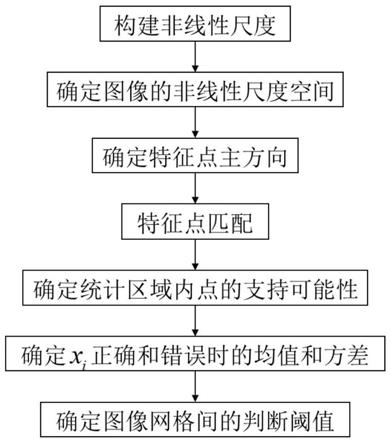
图1是建立基于g
‑
akaze的图像特征匹配算法的步骤流程图;
[0036]
图2是建立基于g
‑
akaze的图像特征匹配算法流程图;
[0037]
图3是利用本发明对四组视觉图像进行特征匹配的结果;
具体实施方案
[0038]
下面通过实施案例对本发明作进一步详细说明。
[0039]
本实施案例选用的数据来自地下遮蔽空间的典型示范区,一共有1000组样本,其中,来自地下隧道、铁路隧道、地下商场、地下停车场、地铁站5种场景,每种场景各有200组数据,采用随机抽样的方法从5组场景中的每份数据中各抽取140组样本作为训练集,剩下的作为测试集。最终,用作训练集的样本总数为700,用作测试集的样本总数为300。
[0040]
本发明所提供的视觉图像特征提取方法整体流程如图1所示,具体步骤如下:
[0041]
(1)构建非线性尺度
[0042][0043]
式中,l表示为图像亮度矩阵,t表示为时间参数,div表示散度函数,表示为图像梯度算子,c表示为传导函数,x表示为图像的横坐标,y表示为图像的纵坐标,i表示为单位矩阵。
[0044]
(2)确定图像的非线性尺度空间l
i+1,j+1
:
[0045]
l
i+1,j+1
=(i+τ
j
a(l
i
))l
i+1,j
,j=0,1,
…
,35
[0046][0047]
式中,i表示计数参数,j表示为计数参数,τ
j
表示为对应步长,a(l
i
)表示为图像l
i
的传导矩阵,n表示显性扩散步数,取值为36,τ
max
表示满足显性扩散稳定性条件时的最大步长值。在整个循环过程中,矩阵a(l
i
)始终保持不变,当循环结束后,算法将重新计算矩阵a(l
i
)的值。寻找不同尺度归一化后的hessian矩阵极大值,确定hessian矩阵h:
[0048][0049]
式中,f表示为定义域内二阶连续可导多元函数,x1、x2、
…
、x
n
表示函数中的自变量参数。
[0050]
(3)确定特征点主方向:
[0051]
利用m
‑
ldb描述符对图像进行描述,通过离散点采样获得散点的亮度值和水平方向和垂直方向的微分平均值,获得的运算符是由0和1构成的二值描述符,对图像分割网格像素,对网格像素进行尺度自适应,比例采样后进行求取平均值操作,确定特征点的主方向。
[0052]
(4)特征点匹配:
[0053][0054]
式中,a和b分别表示对应特征点描述符,m
i
表示描述符a中的第一位,n
i
表示描述符b中的第一位,d表示a和b描述符中的位数,表示描述符进行异或运算。
[0055]
(5)确定统计区域内点的支持可能性p
t
和p
f
:
[0056][0057][0058]
式中,p
t
表示当x
i
正确时,同匹配统计区域里的点支持它的可能性,p
f
表示当x
i
错误时,同匹配统计区域里的点支持它的可能性。f
a
表示在a区域中的一个支持点,表示f
a
的匹配是正确的,表示f
a
的匹配是错误的,表示a区域中的支持点f
a
正好匹配到b区域中,β表示比例系数,取值为0.636,m表示b区域中点的个数,取值为38,m表示整个图像包含的点个数,取值为69。
[0059]
(6)确定x
i
正确和错误时的均值和方差:
[0060][0061][0062]
式中,m
t
表示x
i
正确时的均值,s
t
表示x
i
正确时的方差,m
f
表示x
i
错误时的均值,s
f
表示x
i
错误时的方差,kn表示该匹配点的均值。
[0063]
(7)确定图像网格间的判断阈值λ:
[0064][0065]
式中,α为常数,表示比例系数,取值为0.387。
[0066]
为了验证本发明对灾害环境下图像特征匹配的准确性,对本发明进行了四组视觉图像特征匹配实验,实验结果如图3所示。由图3可知,本发明所建立的灾害环境下图像的特征匹配准确率均保持在98%以上,能够在保证稳定性的基础上达到较高的准确率,特征匹配效果良好。这表明本发明建立的视觉图像特征匹配方法是有效的,为建立精确的图像特征匹配提供了更好的方法,具有一定的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1